




 广告
广告





















































混合自动驾驶交通流中的交通信号配时与轨迹优化
2021-03-09 20:16:36· 来源:同济智能汽车研究所 作者:决策规划研究组

编者按:路口是车路协同的重要应用场景。对于交通灯控制的路口,路端信号灯时序的优化与对应车端车辆轨迹的规划是改善路口拥堵,提高通行效率的有效措施。由于信号灯时序与车辆轨迹的协同规划能够最大程度发挥路口通行能力,应对各类动态交通需求,已得到研究
本文译自:
Traffic Signal Timing and Trajectory Optimization in a Mixed Autonomy Traffic Stream
文章来源:
February 2021. IEEE Transactions on Intelligent Transportation Systems PP(99):1-14
作者:
Mehrdad Tajalli and Ali Hajbabaie
原文链接:
https://ieeexplore.ieee.org/document/9357468
摘要:这项研究介绍了一种针对自动驾驶车辆(CAV)与人类驾驶车辆(HV)混合交通流的路口交通信号配时和车辆轨迹优化协同方法。本文将信号时序和轨迹协同控制问题表示为一个非线性的混合整数优化问题,但其具有较高的计算复杂度。因此,本文通过以下两措施对计算效率和解质量进行平衡。(a)线性化非线性约束并借助混合整数规划解的紧凸壳重构问题 (b)将路口级问题分解为几个车道级问题。因此,得到了一种可同时优化车道级CAV轨迹以及对应车道信号时序参数的新控制器。本方法可为不同需求水平的复杂路口得到较小对偶间隙的近似最优解。案例研究结果表明,本文提出的方法可有效地找到对偶间隙最多为0.1%的解。在将本文方法与现有信号定时和轨迹控制方法比较后发现,不同情况下的平均行驶时间减少了13%至41%,燃油消耗减少了1%至31%。
关键词:交通信号配时,轨迹优化,智能网联汽车、拉格朗日松弛
研究表明,优化智能网联车辆(CAV)轨迹和路口交通信号灯时序具有改善交通的巨大潜力[1]-[5]。CAV轨迹与信号定时的协同优化有助于更准确地规划车辆的路口到达时间,从而更有效地利用路口绿灯时间,减少车辆的路口停车次数、燃料消耗和行程延误。但是,交通信号控制器与将到达车辆间的协作需要的通信和计算能力是巨大的[6],而信号控制器难以处理所有所需计算。此前已有相关研究在以下场景下证明了信号时序和轨迹优化的有效性。(a)简单结构路口(例如,单向街道[2],[7]或直道[8]),(b) 低交通流量路口[2],[7]-[9],(c)基于简化或限制性假设路口(例如,以一阶流量模型计算CAV轨迹或部分CAV轨迹)。而逼近法和启发式算法被用于求解复杂场景,但其是以牺牲解质量为代价[11],[12]。
本文提出了一种针对信号灯控制路口的CAV轨迹和信号时序协同优化方法,该方法可较好地平衡计算效率和解质量。如图1所示,该方法专为CAV和HV的混合交通流而设计,其中CAV的移动受到集中控制,并通过路口处的V2I设备进行通信。该方法需获取路口附近所有车辆(CAV和HV)的初始位置和速度,而使用汽车跟随模型在规划的前瞻时间段内预测HV的对应位置,但HV的运动未被优化。本文假设所有车辆都是网联车辆(只是为了收集车辆位置和速度),或者路口配备了可提供车辆位置和速度的传感器(例如雷达或摄像机)。注意,如果HV不向信号控制器传输信号,只要有传感器可收集到所需数据,本文的算法就可正常工作。本文将该协同优化问题转化为非线性的混合整数规划问题,旨在减少路口车辆的总行驶时间和车速变化。其中决策变量为CAV的加速度和信号时序参数。本文使用了Helly[13]中的线性跟车模型考虑HV和CAV间的相互作用,同时通过合并线性模型中信号时序参数的方式体现模型对交通信号的响应。信号时序参数通过无周期相位的规划进行优化,不仅满足了黄灯时间的约束,还满足了最小最大绿灯时间的约束。
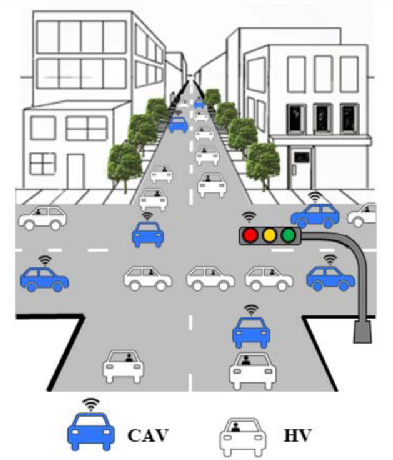
图1 与CAV和HV交互的信号控制器
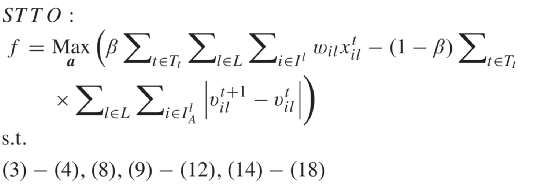
交通信号配时和轨迹优化(STTO)问题十分复杂,尤其车流中存在人类驾驶车辆时,因此需要开发计算效率较高的算法以搜寻近似最优解。此前的研究已表明求解算法需在计算效率和解的最优性间进行权衡取舍。本文引入了一种新的求解方法,该方法使用拉格朗日松弛法将路口级信号时序和轨迹优化问题分解为几个车道级的优化子问题,从而降低STTO问题复杂度,从而在路口的每个车道上对信号时序参数和CAV轨迹进行优化。结果,STTO可拓展到高需求水平的复杂路口情况。此外,本文提出了一种基于路口冲突图的最大团集的问题重构方法,以收紧混合整数可行区域凸壳,从而提高拉格朗日松弛方法的收敛性,减小最优间隙。通过路口处所有控制器协同可搜寻近似最优的路口信号配时参数和CAV轨迹。此外,本文还额外构造了一个求解信号时序规划的简单优化问题,保证在没有上述限制性假设情况下,算法可得到高质量可行解。
 和
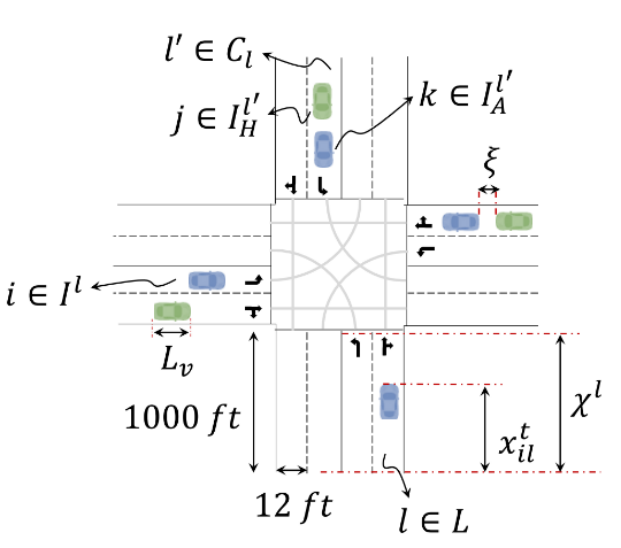
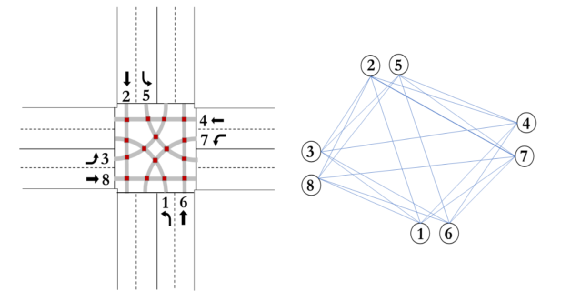
和 分别表示车道l∈L上所有车辆,CAV和HV的集合。我们将Cl定义为与车道l∈L冲突的所有车道集合。图2显示了孤立路口中定义的集合。
分别表示车道l∈L上所有车辆,CAV和HV的集合。我们将Cl定义为与车道l∈L冲突的所有车道集合。图2显示了孤立路口中定义的集合。 表示将相应参数四舍五入。
表示将相应参数四舍五入。
 ,黄灯时间
,黄灯时间 )将基于将近路口车辆i∈Il的位置
)将基于将近路口车辆i∈Il的位置 速度信息
速度信息 进行优化。时间t∈Tt时车辆i∈的加速度
进行优化。时间t∈Tt时车辆i∈的加速度 也是CAV运动规划的控制参数。表I列出了问题描述中的变量,集合和参数定义。
也是CAV运动规划的控制参数。表I列出了问题描述中的变量,集合和参数定义。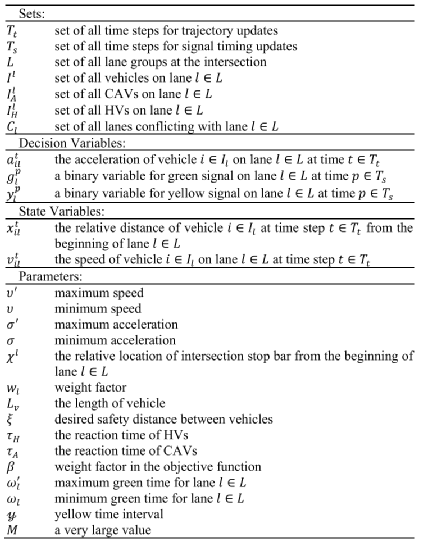


 =0,虚拟的停止车辆位于路口停止线χl处,车辆与路口停止线的安全距离为ξ。当绿灯时候,前一虚拟车辆位置将被设为与后车较远的位置,并且车辆到路口停车线的安全距离将减为零。此外,应注意的是仅当车辆位置路口停车线前时,才需要考虑车辆与交通信号灯间的交互关系。在CAV通过路口后,式(6)失效。绿灯时,等式(6)的第二项中将信号时序变量乘以较大系数M,将虚拟汽车移动到与后车较远的位置。这样后车将不再对其作出反应。
=0,虚拟的停止车辆位于路口停止线χl处,车辆与路口停止线的安全距离为ξ。当绿灯时候,前一虚拟车辆位置将被设为与后车较远的位置,并且车辆到路口停车线的安全距离将减为零。此外,应注意的是仅当车辆位置路口停车线前时,才需要考虑车辆与交通信号灯间的交互关系。在CAV通过路口后,式(6)失效。绿灯时,等式(6)的第二项中将信号时序变量乘以较大系数M,将虚拟汽车移动到与后车较远的位置。这样后车将不再对其作出反应。 是为了解除车辆通过停止线后与信号灯的连接。
是为了解除车辆通过停止线后与信号灯的连接。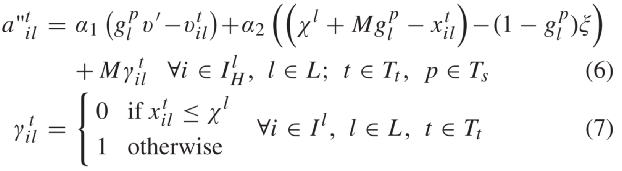




 。约束(15)确保车道l∈L的绿灯时间大于或等于最小绿灯时间ωl。
。约束(15)确保车道l∈L的绿灯时间大于或等于最小绿灯时间ωl。
 为黄灯时间间隔。约束(18)保证了信号时序变量的完整性。
为黄灯时间间隔。约束(18)保证了信号时序变量的完整性。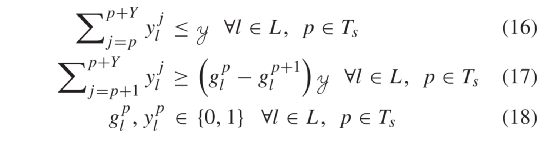
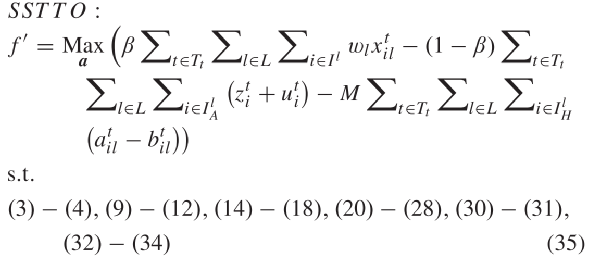
上文所提出的方程组是一个非线性的混合整数规划问题。由于非线性约束和二进制变量的存在,该问题求解困难,难以高效求解。本文首先将目标函数(2)、跟车模型(8)和条件约束线性化以降低其复杂度。此后,使用拉格朗日松弛法将路口级问题分解为几个车道级子问题,这些子问题可帮助降低计算复杂度并且满足车道各自匹配独立信号控制器的特性。各控制器将通过共享拉格朗日乘子协调各信号时序参数和CAV轨迹,确保在满足约束(13)的前提下找到近似最优解。
线性化
 和
和  。将约束( 20 )和( 21 )添加到原始问题,使 和 的差等于绝对值项。目标函数( 2 )的线性形式如( 19 )所示,其中额外目标是使辅助变量和最小。
。将约束( 20 )和( 21 )添加到原始问题,使 和 的差等于绝对值项。目标函数( 2 )的线性形式如( 19 )所示,其中额外目标是使辅助变量和最小。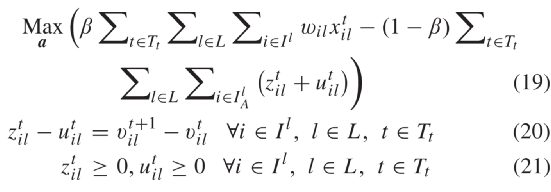
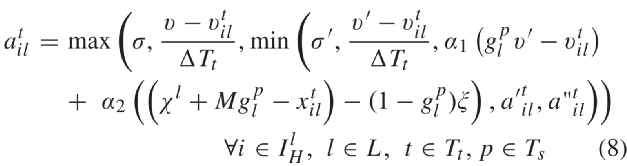
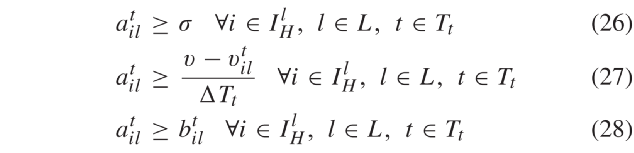
 ∈ Rn 来表示max-min函数(8)中的min部分。值得注意的是 与加速度的单位相同( ft / s2 )。如约束(22)-(25)所示,约束(8)的min部分由以下不等式组表示
∈ Rn 来表示max-min函数(8)中的min部分。值得注意的是 与加速度的单位相同( ft / s2 )。如约束(22)-(25)所示,约束(8)的min部分由以下不等式组表示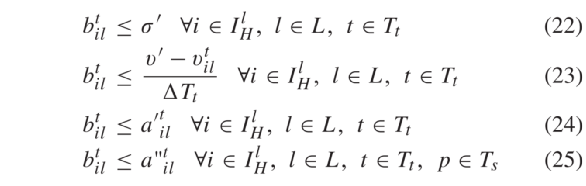
 和 差,由(29)表示。同时采用同样方法线性化(7)。
和 差,由(29)表示。同时采用同样方法线性化(7)。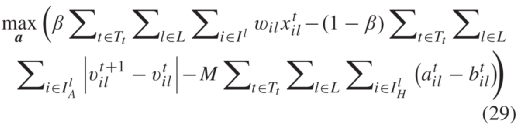

 为时间步长 p ∈ Ts 下车道 l ∈ L 的时序参数 , 的和。因为绿色和黄色信号至多一个取为1,因此 为二进制参数。
为时间步长 p ∈ Ts 下车道 l ∈ L 的时序参数 , 的和。因为绿色和黄色信号至多一个取为1,因此 为二进制参数。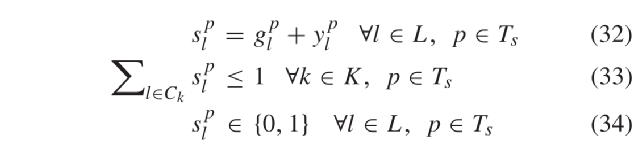
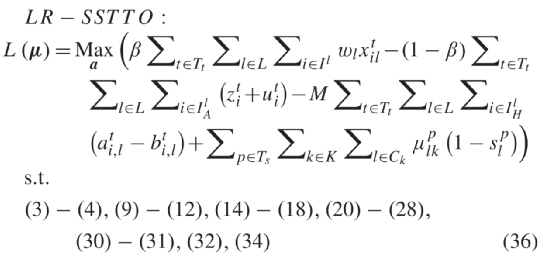
 ∈ R + 是时间步长 p ∈ Ts 车道 l ∈ Ck 的拉格朗日乘数。向量 µ 为所有拉格朗日乘数的向量。由于问题 LR 的目标函数和其余约束在各车道上可分离,因此当对偶乘数 μ 可用时,各车道 l ∈ L 子问题可并行求解。可行点 μ 对应的对偶函数 L ( μ )值始终为最优值 f’ 的上限。因此,可从对偶问题最优值( 37 )中找到对应上限,定义为 µ ∗ 。
∈ R + 是时间步长 p ∈ Ts 车道 l ∈ Ck 的拉格朗日乘数。向量 µ 为所有拉格朗日乘数的向量。由于问题 LR 的目标函数和其余约束在各车道上可分离,因此当对偶乘数 μ 可用时,各车道 l ∈ L 子问题可并行求解。可行点 μ 对应的对偶函数 L ( μ )值始终为最优值 f’ 的上限。因此,可从对偶问题最优值( 37 )中找到对应上限,定义为 µ ∗ 。


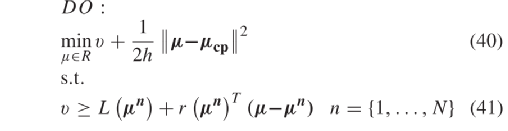
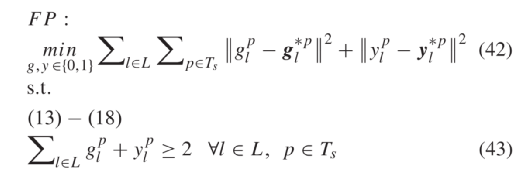
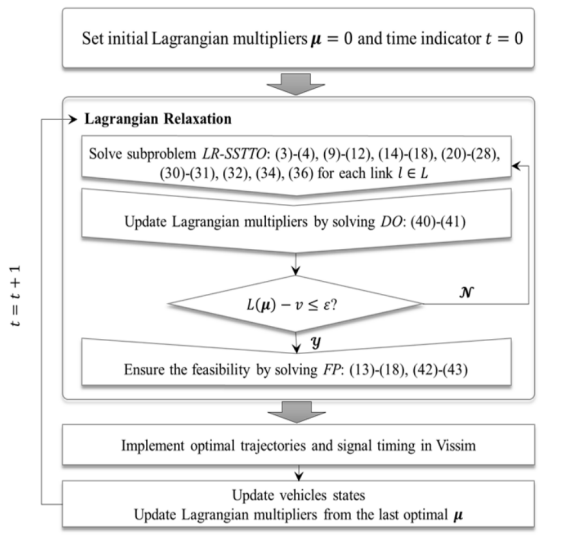
图5 嵌入了拉格朗日松弛方法的RHC
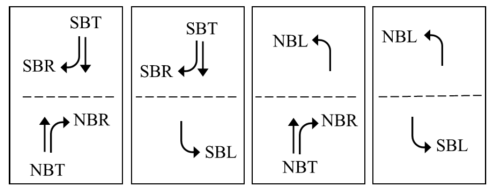
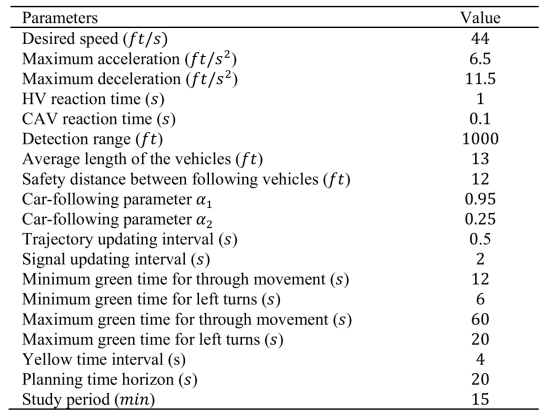
本文在孤立四向路口的左转场景进行研究。如图4所示。假设车辆到达路口前一直处于期望车道。传感器探测范围为路口前后1000英尺。信号状态每两秒钟更新一次,而车辆加速度,速度和位置0.5秒更新一次。RHC的预测范围为20秒。表II展示了更多的详细信息。
表III为本测试的不同场景。在每种场景下考虑六种不同的CAV比例(0%,20%,40%,60%,80%和100%)。使用Vissim [45]测试本文的算法。使用COM接口收集路网中的车辆信息,并将计算得到的最佳轨迹应用于CAV的运动。算法通过Java实现,并在Intel Core i-9-9900 CPU 64 GB内存的台式计算机上运行。MILP优化问题使用CPLEX [46]求解。
表Ⅱ 案例参数
表Ⅲ STTO案例的交通需求
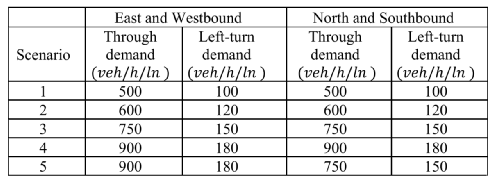
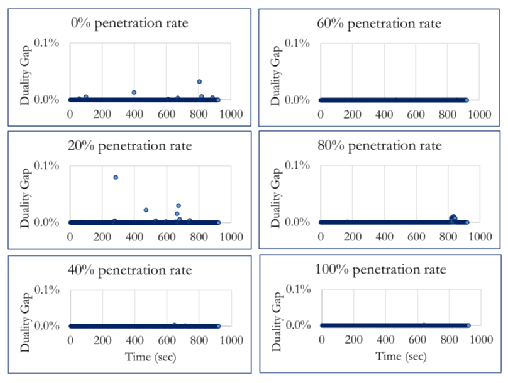
图6 重构问题后拉格朗日松弛的对偶间隙。
表Ⅳ 不同场景的平均时间消耗
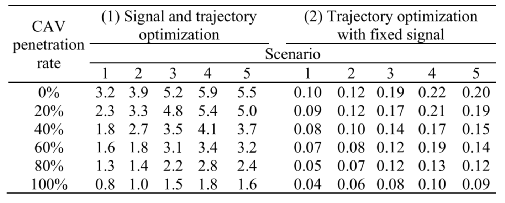
图6展示了场景4下使用拉格朗日松弛法求解STTO的对偶间隙结果,该场景是本研究中交通需求最高的场景。由于借助了滚动时域控制进行求解,拉格朗日松弛问题只需每两秒求解一次。因此,随着时间推移,其可动态求解了所有松弛问题,得到对偶间隙的变化。从图6可看出对偶间隙大部分为零,这意味着本文的解大部分具有强对偶性。此外,结果还表明对偶间隙在场景四的不同CAV比例情况下都始终小于0.1%。
表Ⅴ 不同信号控制器的平均行驶时间(s)
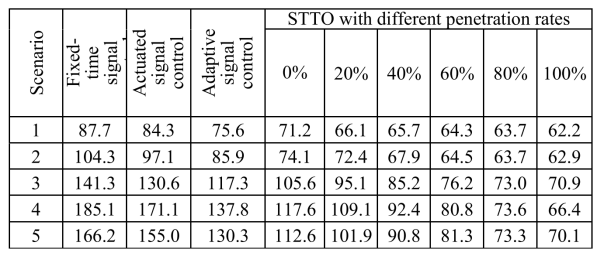
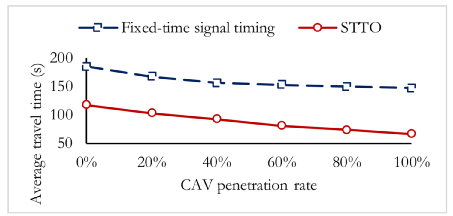
图7 各CAV比例下,STTO与固定时序控制性能比较
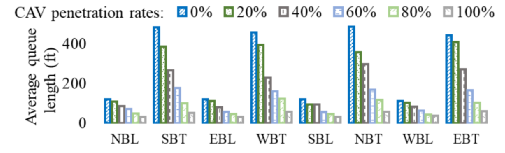
图8 场景4的平均队列长度
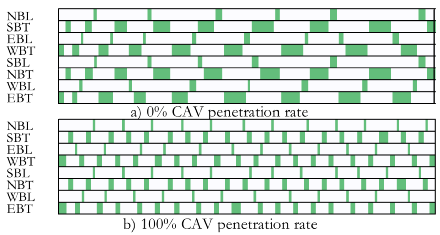
图9 比较0%和100%CAV比例下的信号时序
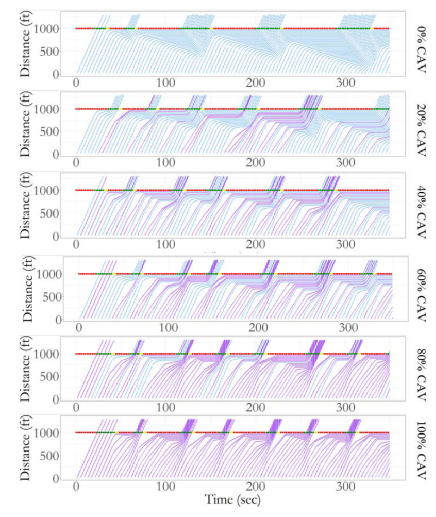
图10 车道1上CAV和HV轨迹
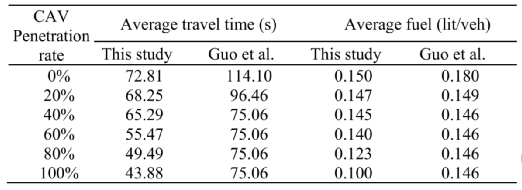
表Ⅵ 与GUO方法比较
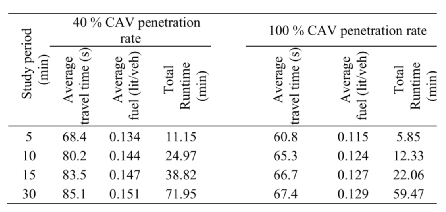
表Ⅶ 不同研究时间的STTO效果
从表六可看出随着CAV比例增加,平均行驶时间和燃料消耗都在减少。此外,本文算法在不同CAV比例情况都要优于[3]的最优结果。值得注意的是郭等[3]假设信号时序有四个阶段。但我们的研究包括了八个阶段,可表示更普通的情况。此外,相位顺序在[3]中是固定的。而本文的相位是没有固定顺序的。
表VII展示了STTO在5、10、15和30分钟研究时间内的平均行驶时间,平均燃油消耗量,总运行时间,并且两个CAV比例分别为40%和100%。表VII中的趋势表明,由于有更多车辆在路网中,因此研究时间的增加会导致平均行驶时间和平均燃油消耗的增加。
这项研究提出了一种针对CAV和HV混合交通流路口的信号配时和轨迹协同优化方法。我们将STTO问题建模为一个混合整数非线性规划问题,并且假设所有车辆均网联,或路口已配备了可提供车辆位置的传感器(例如雷达单元)。HV的轨迹是通过Helly的跟车模型预测的得到的。
由于非线性和二进制变量的存在,该优化问题较为复杂。因此,通过线性化非线性约束,并使用拉格朗日松弛法将路口级优化问题分解为多个车道级子问题的措施从而降低问题复杂度。这样也可利用单个控制器对各车道中车辆进行信号时序和CAV轨迹进行控制。此外,为了减少对偶间隙,还借助可行域的紧凸壳重构STTO问题。针对拉格朗日松弛解可能不满足松弛约束条件的问题,本文又引入了额外的优化问题以搜索高质量的可行信号时序参数。同时,求解方法被嵌入到滚动时域控制中,以反映问题的动态性质。
结果表明,在各测试情况下,本文的方法可成功求解,同时其最优间隙不超过0.1%。同时STTO在不同CAV比例下求得的信号时序均优于自适应控制器的结果,STTO可使平均行驶时间减少5%至51%。此外,提高CAV比例可减少路口处所有车辆的平均行驶时间,这在更高交通需求的场景下更为显著。
本文提出的方法适用于单独考虑左转的路口场景。而将本方法推广至所有路口类型是很有价值的。此外,本研究假设车辆在可检测到的路口范围内不换道,并且也不控制CAV进行换道。因此未来开发用于预测HV变道的算法,并优化CAV的变道决策可进一步改善交通情况。同时,本研究利用了线性跟车模型,而使用更复杂的跟车模型的研究也是未来的方向。更深入地来说,路网中的信号定时和轨迹控制研究也是未来的方向。因为路口间的相互沟通协同决策相对单个路口的应用可进一步改善交通运行和交通安全性。
联系人:张老师
电话:15221659529
邮箱:20666080@tongji.edu.cn
- 下一篇:新能源商用车动力总成趋势及关键技术
- 上一篇:柴油/天然气发动机燃烧系统协同优化方法



编辑推荐




最新资讯
-
中汽中心工程院能量流测试设备上线全新专家
2025-04-03 08:46
-
上新|AutoHawk Extreme 横空出世-新一代实
2025-04-03 08:42
-
「智能座椅」东风日产N7为何敢称“百万级大
2025-04-03 08:31
-
基于加速度计补偿的俯仰角和路面坡度角估计
2025-04-03 08:30
-
《北京市自动驾驶汽车条例》正式实施 L3级
2025-04-02 20:23
