




 广告
广告





















































ADAS系统(二) — 前途无限的激光雷达
2021-03-15 23:08:05· 来源:新能源控制系统及MBD开发 作者:行知奕

上篇文章搞得是毫米波雷达,想了想,自己想搞个连载,至于能不能搞完整,但是NB要先吹出来,只有这样才能动力去完成自己吹过的NB。 定义:激光雷达的历史在激光
上篇文章搞得是毫米波雷达,想了想,自己想搞个连载,至于能不能搞完整,但是NB要先吹出来,只有这样才能动力去完成自己吹过的NB。
定义:激光雷达的历史
在激光雷达发现之 前,我们定义的雷达是(Radio Detection and Ranging)是以毫米波,微波,超声波为载波的雷达。
当随着激光技术的发展,大家讲激光技术与雷达技术结合,然后就发明对应的激光雷达,最早应用于航天领域,其后,应用于测绘,安防,交通领域等。
同时也出现很多类型的激光雷达,例如,激光成像雷达,激光差分雷达,微脉冲激光雷达,激光合成孔径雷达,激光相控阵雷达。目前在军事上应用最为广泛,也是其激光技术的发展动力。
其激光雷达在自动驾驶上的应用相对晚一些。首先提出这个方案的是在2004年美国国防部高级技术研究局(DARPA)搞了一个无人车挑战赛,看看那个车辆可以在无人控制的情况下,行驶200多公里,当时虽然参加的人很多,但是大多都没有完成比赛。

由于比赛环境相当苛刻,随着时间推移,奖金也越来越高,但是依旧没有那支比赛队伍可以搞定。到第三届的时候,Velodyne的创始人,就搞了个底座可以旋转的64线雷达,大大提高了对周围环境的感知与重建,并在随后的无人车挑战赛上取得更加优秀的成绩
在此之后,各大汽车厂商,供应商开始加大对激光雷达的开发与应用,直至今日,对激光雷达的研究企业,那是相当火,开发工程师的哪些屌丝,工资可以与BBA媲美。
定义:啥叫激光雷达?
定义: 激光雷达是工作于光学波段的雷达,以激光作为载波,以光学器件为天线,以光学探测器为接收器,进行环境探测的装置,可以定义为LIDAR(Light Detention and Ranging) 或者LADAR(Laser Detection and Ranging).
如果你对毫米波雷达比较了解,你就可以依次类推,激光雷达波长在1550nm左右,可以发现激光雷达发射的激光在红外线范围之内,波长范围位于红外线(0.76—1000μm,760 nm-1 mm),而毫米波波长在毫米级别(1mm-10mm),其波长远远大于激光雷达的激光,所以说本质上,就是一种波,对周围环境的感知,无非是波长的不同而异,都是通过传播时间,确定距离,两次的时间差分,求速度,如下图所示: 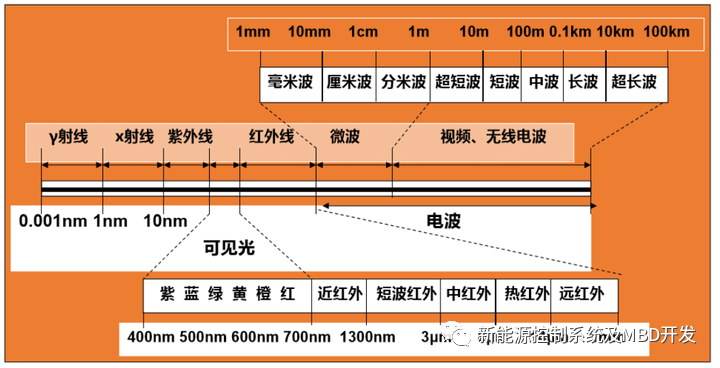
下面我们聊唠唠激光雷达的原理,说到原理,我们来看看这个东西到底有啥组成的。 发射器+感光器+光学部件+扫描= 激光雷达(机械式),关于其它形式的雷达,我们后面再讲,具体形式,如下图所示:
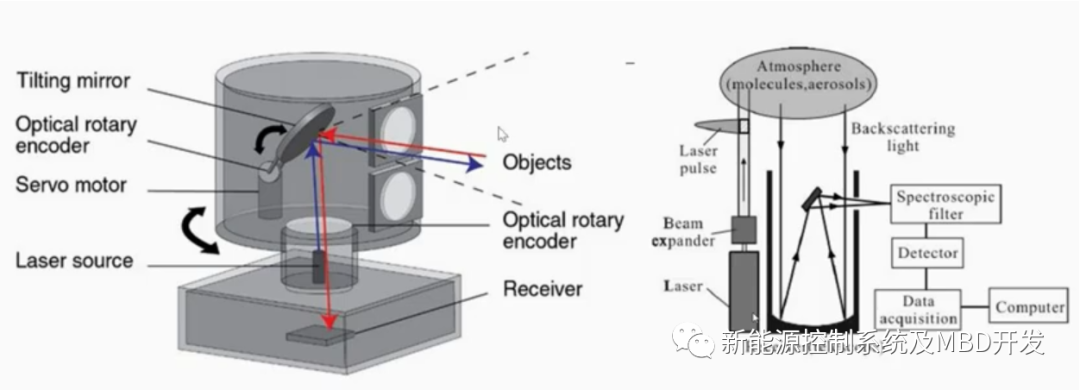
发射器是干啥呢?发射激光,600nm-1000多nm的激光射线,光学部件与扫描部件是接收反射光。感光器是用来分析反射光的(例如光强度的信息),从而预估出物体的类型。 通过这些介绍,大家可以大致的了解激光雷达里面到底是啥了?下面聊一下其工作原理。
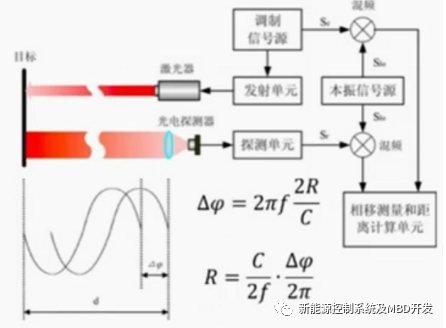
同时,很多朋友肯定听说,激光相位差测距,这个测距的原理,与毫米波雷达有点类似,都是将两个高频信号,搞成中频信号,然后计算其相位差,从而得到距离信息。
这两种测距方法有啥优缺点呢?脉冲光,速度快,分辨率低,相位测距,测量速度慢,分辨率高,但对于自动驾驶来说,要求的是速度快,分辨率为cm级别即可,所i有大多数都用脉冲光进行测距。 测速与测角度原理: 这个就相对比较简单了,测速,就是将多帧的点云信息进行微分处理即可,测量角度,因为是机械式的雷达,旋转的角度就可以通过底座的马达旋转角度与多帧点云,预估出来。 高度测量原理: 对于激光雷达,还有一个维度可以测量,就是物体的高度,这个高度其实就是激光雷达的线度进行测量,单线的雷达,仅仅可以探测在一定高度的雷达,多线雷达,就相当于切西瓜一样,将一个物体分为多份,从而得到其高度。目前最NB的就是64线与128线雷达。
物体特性测量的原理: 因为不同物体对激光反射的光谱特性不同,故可以通过反射光谱可以看到物体的轮廓,颜色,热量等相关信息。
因此有时候可以说,激光雷达测量的信息,是4D信息的原因。
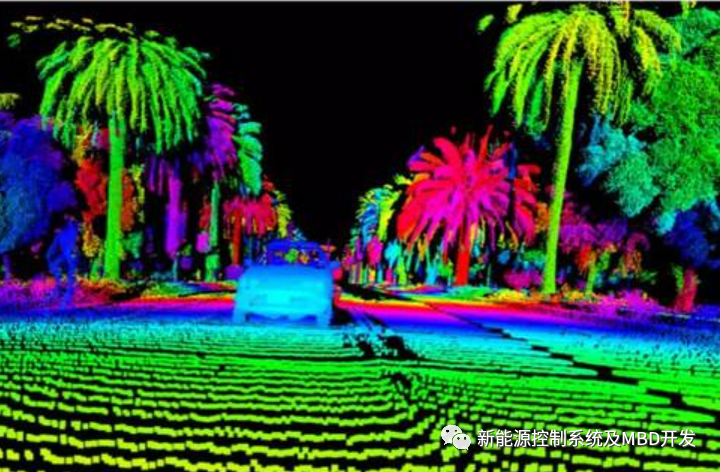
上述描述的测量原理,是通过何种形式表现出来的呢? 毫米波雷达是通过鸟瞰图,激光雷达是通过点云表现出来,何为点云呢? 点云是在同一个世界坐标系中表达目标空间分布和目标光谱特性的海量点集合。那这个点云是如何形成的呢?
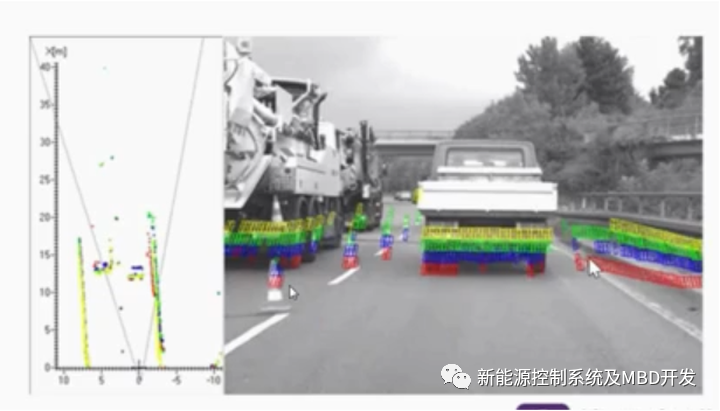
由于激光雷达不是静止不动的,在行驶过程中,激光雷达同时以一定的角度匀速转动,在这个过程中,不断的发出激光并收集反射点信息,以便得到全部的环境信息,单线程的激光可以得到反射点的距离,时间与水平角度,由于每个激光发射器有固定编号,角度,同时激光雷达会旋转一周收集到所有的反射点坐标,这个集合形成我们所说的二维点云,如下图所示:
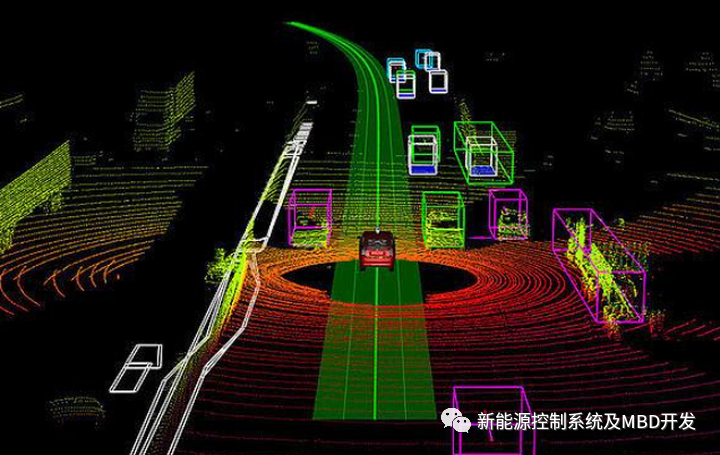
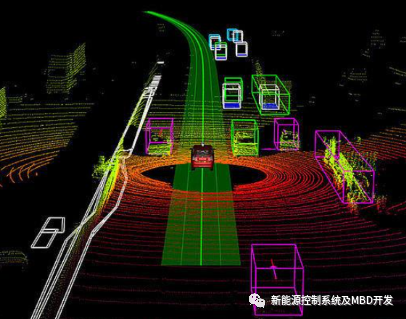
同时如果激光雷达的是多线程的,就可以形成三维点云,同时包含对应的高度,得出其立体结构。如下图所示:
根据以上介绍,大致了解其工作原理,同时,激光雷达与毫米波雷达一样,都有对应的参数信息,我从百度上找个图,大家可以参考以下,看看。具体就不多唠了。
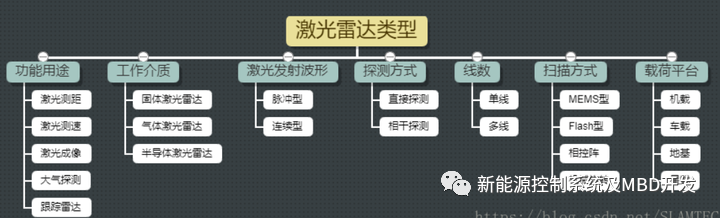
目前自动驾驶用的大概有两类,一类是机械激光雷达,一类是固态激光雷达,机械激光雷达如上面所描述的,下面重要介绍以 下,资本市场比较火爆的固态激光雷达,全部的激光雷达分类如下图所示:
固态激光雷达,大家可以理解为没有旋转部件的激光雷达,根据其原理可以分为三种,FLASH,MEMS,基于相控阵的。 所谓的固态激光雷达,大家普遍的认识是不旋转的就是固态激光雷达。通常分为三种,基于相控阵、Flash、MEMS三种方式实现的。 相控阵的雷达 如下图所示,其实就可以理解为毫米波雷达的加强版,有一个发射阵列,根据每个发射点的激光相位差,来进行扫描周围环境。 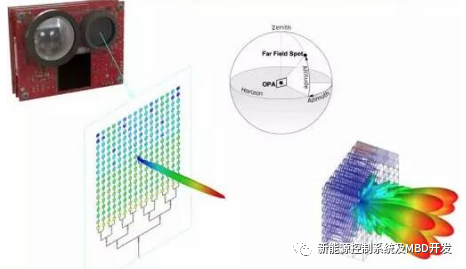
Flash形式的激光雷达 ,属于非扫描程式,主要发射面阵光,以二维或者三维图像为输出内容的激光雷达,如下图所示,一个是扫描式,类似于毫米波雷达,一个是直接扫描的雷达。 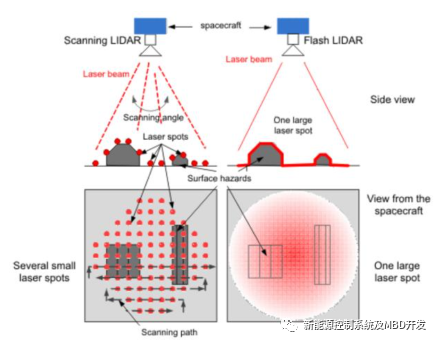
MEMS 是通过微振境的方式改变单个发射器的角度进行扫描,由此行成一种面阵光效果。 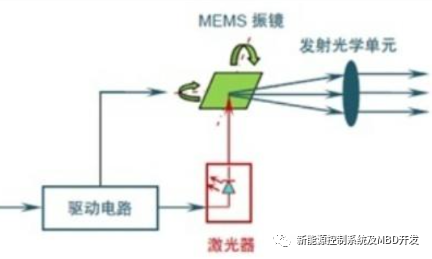
这三种形式的激光雷达体积都比较小,但是目前量产的不多,大多都是Demo阶段,可以理解为明日之星。
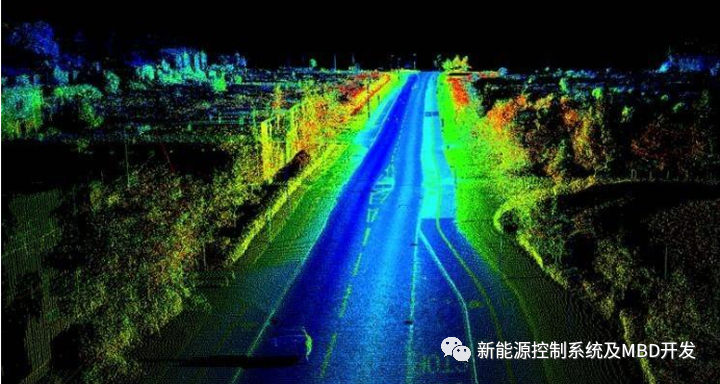
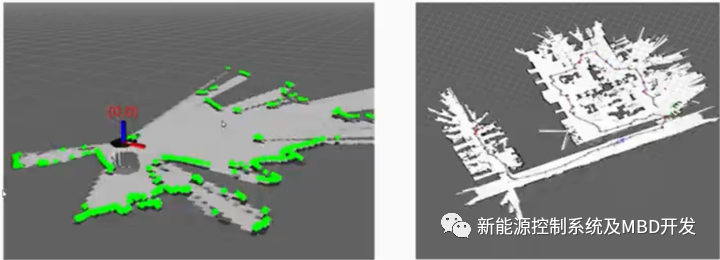
啥叫SLAM? SLAM 就是Simultaneous Localization and Mapping ,即同步定位与地图的构建,可以理解为,车辆在一个陌生环境中从一个未知未知开始移动,在移动过程中,根据未知估计和地图进行自身定位,同时在自身定位的基础上建造增量式地图,从而实现车辆的自主导航与定位,也可以理解为L3+以上的自动驾驶 如下图所示,就是SLAM构建的地图,
SLAM算法如何实现呢?
SLAM在自动驾驶中有啥作用呢? SLAM的最大优势就是可以生成高精度地图,高精度地图可以达到厘米级别,同时可以对路肩,道路的坡度,车与道路之间的距离,这使得自动驾驶车辆不仅仅能够轻松控制自己的位置,同时也使自己的路径规划,拥有更多的信息输入,从而使车辆的自动驾驶等级达到L3++以上。
激光雷达的企业,在资本的浪潮下,如雨后春笋一样,多如牛毛,但是真正做成产品的又有几家呢,让我们来一一数数。 高大上的企业: 
本土企业: 这些企业发展都不错,但是让目前的形式,预估以下那个企业发展将会更加NB,目前不详,因为目前L3,L4的技术方案,还没有最终定论, 比如那个吊炸天的特斯拉,他就不用激光雷达,纯粹用摄像头与毫米波雷达的算法迭代。
目前激光雷达还是处于蓝海的边缘,虽然它有很明显的优点,但是其缺点还是比较明显,从而使大众接受到还有一段时间,比如其售价高昂,安全性相对较低(没有加密编码,同时容易收到相邻雷达的干扰),恶劣环境适应性(尤其是雾霾天气的适应性),计算量大(相对应的算法与硬件就比较复杂)等等。
这也就抑制其实际应用的难度,但是有难度才会有挑战,有挑战才会有机会,只有这样才有 发财 的机会,要不估计也不会是资本的宠儿。
定义:激光雷达的历史
定义:啥叫激光雷达?
定义: 激光雷达是工作于光学波段的雷达,以激光作为载波,以光学器件为天线,以光学探测器为接收器,进行环境探测的装置,可以定义为LIDAR(Light Detention and Ranging) 或者LADAR(Laser Detection and Ranging).
概述1:激光雷达优缺点
首先从发射端分析,就是波长不同, 从上图可以看到,它与毫米波最大的区别就是波长比较短,所以相对于毫米波就有很好的分辨率,同时,因为波长短,就容易收到外部天气及工作环境的影响,比如沙尘暴,雾霾,激光雷达的反射点云,就很容易受到干扰,所以相对精度就收到影响。
其次是接收端,就是激光对颜色的反射后的波特性不同,从而可以识别对应的道路标识,车道线等!但是如果是毫米波雷达,就无法得到对应的结果。这也是激光雷达的NB之处。
概述2:激光雷达的工作原理
概述3:激光雷达的测量原理
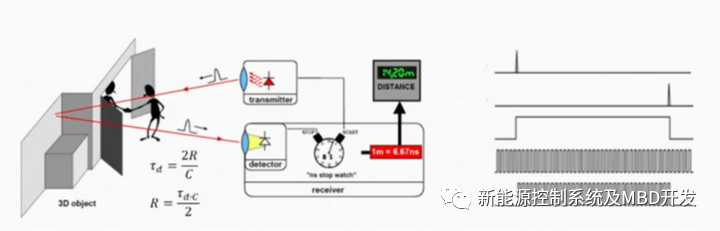
测距原理:根据其脉冲光遇到障碍物后,折返时间,计算其目标与自己的相对距离,与其它雷达没啥本质区别,如下图所示:
概述4:激光雷达的测量描述
概述5:激光雷达的分类
激光雷达的SLAM应用
-
Step 1: 数据筛选,剔除有问题数据,通用的的算法就是卡尔曼滤波或者贝叶斯算法。
-
Step 2: 将筛选到的数据,与高精度地图进行匹配,然后进行对应位置的更新。
-
Step3: 地图融合,将这一轮来自激光雷达的信息,拼接到原始的地图中,完成地图更新。
-
激光雷达的相关企业
小 结



编辑推荐




最新资讯
-
大卓智能端到端直播实测,16公里复杂路段挑
2025-04-25 17:16
-
《汽车轮胎耐撞击性能试验方法-车辆法》等
2025-04-25 11:45
-
“真实”而精确的能量流测试:电动汽车能效
2025-04-25 11:44
-
GRAS助力中国高校科研升级
2025-04-25 10:25
-
梅赛德斯-AMG使用VI-CarRealTime开发其控制
2025-04-25 10:21
