




 广告
广告





















































六个判断激光雷达性能好坏的主要指标
2021-03-20 00:35:31· 来源:园区无人驾驶编辑部

较高的扫描频率可以确保安装激光雷达的机器人实现较快速度的运动,并且保证地图构建的质量。在每个细分领域激光雷达都大有所为,尤其是现下火热的机器人及无人驾
较高的扫描频率可以确保安装激光雷达的机器人实现较快速度的运动,并且保证地图构建的质量。
在每个细分领域激光雷达都大有所为,尤其是现下火热的机器人及无人驾驶领域,就单线激光雷达而言,致力于解决机器人的自主定位及导航问题。作为评判激光雷达性能好坏的重要指标,在选购时,有哪些重要参数指标值得关注呢?
测距距离
激光雷达的主要作用便是距离测量,指的是传感器能探测到物体的最远距离,其测量的最大距离(量程)自然是其最核心的指标。大部分激光雷达都会直接以测量距离作为其主要指标。
扫描频率
较高的扫描频率可以确保安装激光雷达的机器人实现较快速度的运动,并且保证地图构建的质量。但要提高扫描频率并不只是简单的加速激光雷达内部扫描电机旋转这么简单,对应的需要提高测距采样率。否则当采样频率固定的情况下,更快的扫描速度只会降低角分辨率。
测量分辨率
对于激光雷达来说,测量分辨率对于三角测距雷达来说更具挑战,由于测量原理的关系,虽然一般在10米以内都可以实现很高的测距分辨率,但其分辨率亦会随着探测物体距离增加而剧烈下降。因此,为了实现更远距离的探测,就不只是增加激光器功率这么简单了,需要对于测距核心有本质的改良。同时为了可靠量产,也需要做很多的配套工作。
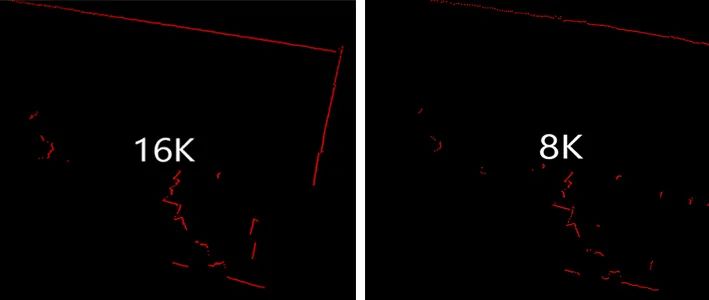
不同采样率的对比
测量精度
测量精度指的是测量一定数量后得出的真实值,是与真实一致性的度,重复精度也叫再现性或可重复性,是用于表示多次测量得到同一结果的可能性的量。
以上列举的几大参数指标相信大家并不陌生,但要进一步提升激光雷达的实用性及可靠性,深色物体检出率和环境光抗干扰能力这两大性能指标也是关注的重点。
深色物体检出率
在激光雷达的实际应用中,经常会遇到深色物体的检测,如家具、暗色墙纸等。由于深色物体吸收了绝大部分的光能量,想让激光雷达对深色物体与白色物体有一样的检测力显然是不现实的,对于以机器视觉为核心的三角测距原理雷达更是如此。

如今,深色物体的检测能力也被作为激光雷达研究的重点方向,正常情况下一款号称有10米以上的激光雷达,至少能实现6米以上的深色物体的有效检测。
环境光抗干扰能力
除了深色物体的检测能力,激光雷达在实际工作中也容易受到光照影响,如窗外直射的阳光与室内人造的灯光,这些都会对激光雷达传感器产生影响。容易导致激光雷达出现噪声,同时,也可能导致雷达的有效测量距离变短或者完全无法进行距离测量。所以能否区分出环境光和激光信号就必须要有更优异的处理算法和光学调校。
在每个细分领域激光雷达都大有所为,尤其是现下火热的机器人及无人驾驶领域,就单线激光雷达而言,致力于解决机器人的自主定位及导航问题。作为评判激光雷达性能好坏的重要指标,在选购时,有哪些重要参数指标值得关注呢?
测距距离
激光雷达的主要作用便是距离测量,指的是传感器能探测到物体的最远距离,其测量的最大距离(量程)自然是其最核心的指标。大部分激光雷达都会直接以测量距离作为其主要指标。
扫描频率
较高的扫描频率可以确保安装激光雷达的机器人实现较快速度的运动,并且保证地图构建的质量。但要提高扫描频率并不只是简单的加速激光雷达内部扫描电机旋转这么简单,对应的需要提高测距采样率。否则当采样频率固定的情况下,更快的扫描速度只会降低角分辨率。
测量分辨率
对于激光雷达来说,测量分辨率对于三角测距雷达来说更具挑战,由于测量原理的关系,虽然一般在10米以内都可以实现很高的测距分辨率,但其分辨率亦会随着探测物体距离增加而剧烈下降。因此,为了实现更远距离的探测,就不只是增加激光器功率这么简单了,需要对于测距核心有本质的改良。同时为了可靠量产,也需要做很多的配套工作。
不同采样率的对比
测量精度
测量精度指的是测量一定数量后得出的真实值,是与真实一致性的度,重复精度也叫再现性或可重复性,是用于表示多次测量得到同一结果的可能性的量。
以上列举的几大参数指标相信大家并不陌生,但要进一步提升激光雷达的实用性及可靠性,深色物体检出率和环境光抗干扰能力这两大性能指标也是关注的重点。
深色物体检出率
在激光雷达的实际应用中,经常会遇到深色物体的检测,如家具、暗色墙纸等。由于深色物体吸收了绝大部分的光能量,想让激光雷达对深色物体与白色物体有一样的检测力显然是不现实的,对于以机器视觉为核心的三角测距原理雷达更是如此。
如今,深色物体的检测能力也被作为激光雷达研究的重点方向,正常情况下一款号称有10米以上的激光雷达,至少能实现6米以上的深色物体的有效检测。
环境光抗干扰能力
除了深色物体的检测能力,激光雷达在实际工作中也容易受到光照影响,如窗外直射的阳光与室内人造的灯光,这些都会对激光雷达传感器产生影响。容易导致激光雷达出现噪声,同时,也可能导致雷达的有效测量距离变短或者完全无法进行距离测量。所以能否区分出环境光和激光信号就必须要有更优异的处理算法和光学调校。
- 下一篇:制动和转向自适应控制下的智能驾驶系统
- 上一篇:车载摄像头的技术趋势 — 智能摄像头



编辑推荐




最新资讯
-
Rivian与MAE合作定制电动车测试设备安装项
2025-04-10 14:41
-
重型商用车辆和客车的动力学——操纵性
2025-04-10 14:40
-
新能源汽车VCU、BMS、MCU控制器图解
2025-04-10 14:39
-
陶琳回应电动车辐射高:特斯拉辐射值远低于
2025-04-10 13:14
-
nCode2025版本发布说明
2025-04-10 13:12
