




 广告
广告





















































世界卡车列队跟驰技术进展报告
2021-03-24 10:33:05· 来源:智车科技

/ 导读 /近期日本完成了卡车后车无人列队跟驰开放道路验证测试,藉此契机本文对列队跟驰技术在世界主要国家地区的发展历程和近期动向进行了汇总介绍,并对列队跟
/ 导读 /
近期日本完成了“卡车后车无人列队跟驰”开放道路验证测试,藉此契机本文对列队跟驰技术在世界主要国家地区的发展历程和近期动向进行了汇总介绍,并对列队跟驰技术的发展现状和前景进行了简单评述。
卡车列队跟驰(truck Platooning),又称队列行驶、列队行驶、列队跟驰、编队驾驶、卡车列车等,2辆或以上卡车通过DSRC等车间通信(V2V)进行通讯,将前车的加减速等动作信息及车速、位置信息实时传递给后车并利用自适应巡航、车道偏离报警、自动制动等ADAS辅助系统对后车进行自动整体控制,以近距离间距编队形式在道路上行驶,可分为后车有驾驶员的有人编队行驶以及后车无驾驶员的无人编队行驶。
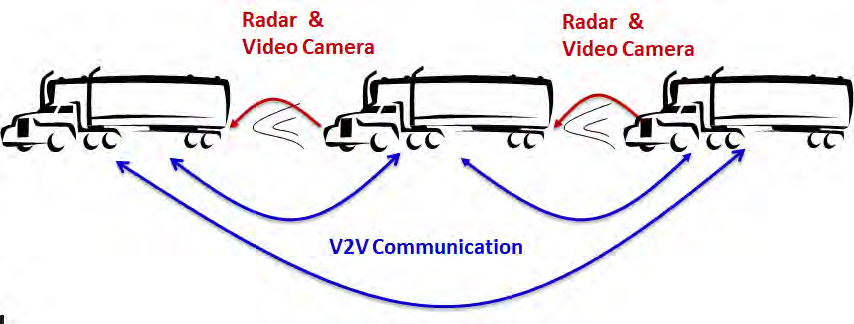
编队行驶的基本技术原理是将单一车道内的相邻车辆进行编队,根据相邻车辆信息自动调整该车辆的纵向运动状态,最终达到一致的行驶速度和期望的几何构型。
列队跟驰主要应用场景在高速公路,因为高速公路属于封闭式场所,虽然不确定性因素众多,但相对国道、省道等路线,其显然更合适编队行驶。
商用车列队跟驰作为自动驾驶率先应用的领域,可有效控制车辆之间的距离和车队的行驶状态,减小车队行驶中的风阻,从而降低车辆的燃油消耗。。同时,列队跟驰的应用也将大大降低驾驶员的工作强度,提升驾驶安全性,降低商用车运营成本。
因此,卡车列队跟驰技术得到了各国及众多企业的重视。
1 世界各国列队跟驰技术进展汇总
伴随着自动驾驶技术的兴起,各国以及众多企业均对卡车列队跟驰技术进行了开发和测试。
车辆编队行驶的早期研究始于1980年代美国加州的PATH项目,之后的研究包括欧洲的SARTRE项目,日本的Energy ITS 项目以及荷兰的GCDC项目等,如图所示。
1. 美国
美国交通部(USDOT)将卡车编队行驶视为自动驾驶车辆在货运行业的重要早期应用。2016年9月20日,USDOT发布了其联邦自动化车辆政策,它将促进技术研究、测试、应用,其中就包括了与双卡车编队相关的内容。2018年发布的联邦自动化车辆政策AV 3.0版中,也多处涉及编队行驶。目前,美国已有二十多个州立法允许公开道路卡车编队行驶。

Peloton公司列队跟驰车辆
美国的Peloton是专业挑战卡车队列行驶技术的初创公司。2019年Peloton Technology Inc.发布了新的L4级Automated Following(自动列队跟驰)解决方案,使驾驶员可以控制两辆卡车。Peloton Automated Following是一个先进的队列行使系统,利用V2V通信和雷达主动制动系统,并结合车辆控制算法,使单个驾驶员能够驾驶两辆卡车,实现互联驾驶,从而提高空气动力学、燃油经济性和安全性。
Automated Following利用了部署商用L1级列队系统PlatoonPro的经验。该系统是一个SAE L4级自动驾驶解决方案,连接一辆全自动跟随行驶的卡车与一辆由驾驶员控制的领头卡车,使两辆卡车列队行驶。V2V链接允许由驾驶员驾驶的领头卡车引导随行卡车进行转向、加速和制动,并连接卡车之间的安全系统。并且延迟时间短。Peloton独特的方法将领头卡车中的人类驾驶员经验与最先进的传感器和随行卡车中的硬件结合起来,极大简化了部署独立SAE L4级自动驾驶系统的许多技术挑战。该解决方案能适应各种路线、天气条件和交通条件,比单个车辆L4级解决方案扩展速度更快。
Locomation公司列队跟驰车辆
卡车技术供应商Locomation公司2020年8月和美国卡车物流公司Wilson Logistics进行了一次试点计划,首次使用了ARC系统运送商业货物,两辆Wilson Logistics卡车(后车有驾驶员)沿着I-84高速公路行驶了420英里(约675公里)。Locomation公司的商用系统「Autonomous Relay Convoy」(ARC系统)只需要一名驾驶员驾驶牵头卡车,而随后的数辆卡车以全自动驾驶的方式进行跟随行驶。使用专用近距离通信(DSRC)技术互相连接。
当ARC系统启用时,只有领头驾驶员主动参与驾驶。随行卡车则由ACR系统控制,其驾驶员会可以交出车辆控制权,此时,跟随行卡车达到L4自动驾驶级别。经过设定的时间间隔后,两辆卡车互换位置。第二名驾驶员会接管车队的控制权,而此前领头车辆的驾驶员就可以交出控制权。
Locomation公司2020年10月宣布计划在2022年实现自动驾驶列队跟驰卡车商业化。
2. 日本
日本在“未来战略投资2017”中提出最早在2022年实现卡车编队行驶的商业化,后期一直在加速进行验证试验。近期主要相关政策包括:
• 官民ITS构想-路线图2018
• 自动驾驶相关制度整备大纲
• 第2期SIP自动驾驶(系统与服务的拓展)
日本的列队跟驰技术由国家主导推动,从2016年正式展开由国土交通省和经济产业省主导的卡车编队相关业务,并于2018年1月进行了首次多品牌卡车编队测试,参与的OEM厂商包括多家商用车企业,例如日野、三菱扶桑、UD、五十铃等,丰田通商接受日本经济产业省“面向高度自动行驶系统社会实装的研究开发验证事业:卡车列队跟驰社会实装验证” (「高度な自動走行システムの社会実装に向けた研究開発・実証事業:トラックの隊列走行の社会実装に向けた実証」)项目委托,自2016年开始推进相关研究开发。
丰田通商2018年6月28日已发布过在茨城县的产业技术综合研究所测试道路上实现了卡车后车无人列队跟驰技术。2019年1月开始日本国内首次后车无人卡车列队跟驰开放道路验证。
日本国土交通省和经济产业省2021年3月5日发布消息,在日本新东名高速的部分区段上成功实现了“后车无人列队跟驰”(列队跟驰又称编队行驶、队列行驶等)验证测试。

日本后车无人列队跟驰测试

软银5G列队跟驰测试
此外,2019年6月,软银在新东名高速上成功实现世界首次应用5G通讯卡车列队跟驰验证试验,成功实现车间距自动控制。
3. 韩国

现代列队跟驰测试
现代汽车公司2019年11月在在韩国京畿道骊州市智能高速公路上成功进行了该公司首个卡车编队试验,试验中采用了两辆连接拖车的Xcient牵引车。
当后方卡车接近领头卡车时,编队模式就会启动,编队操作就会开始。一旦编队模式启动,后方卡车会与前方卡车保持16.7米的距离,并根据领头车辆的加减速情况实时微调。驾驶员无需踩油门或刹车,极大地减轻了在道路上的疲劳,提高了安全性。此外,该模式还会激活车道保持技术,让后方车辆驾驶员的手能够离开方向盘。
有了车辆编队技术,还可以无缝管理其他车辆在卡车之间插入或插出。如果一辆车突然插入了卡车车队中,后方卡车会自动将其与领头卡车的距离扩大到至少25米。如果领头卡车由于意外情况,突然紧急停车,该技术还可以让后方跟随的卡车减速并停下。
4. 欧洲
欧洲是最早推进卡车列队跟驰技术开发的地区,早在2009年9月,欧盟就启动了周期跨度3年的SARTRE(Safe Road Trains for the Environment)交通改善项目,旨在开发安全环保的公路行车列队技术,希望解决环保、安全、交通拥堵这三个基本问题,同时从提升驾驶舒适度这一角度出发鼓励驾驶者接受这项技术。
之后欧盟和行业协会均有资助或推动卡车列队跟驰验证项目,各家OEM厂商均参与,ZF等供应商也一同参与。目前验证项目已获得很大进展,但戴姆勒出于实用化效益原因已宣布终止继续开发该技术。

欧盟2016卡车队列挑战活动
• 由欧洲汽车制造商协会(ACEA)组织的“2016卡车队列挑战活动”, 每三辆卡车为一组,在公路上列队依次前进,只需要第一辆车驾驶员控制车辆,后面两辆车利用无线通讯技术实现同步跟随,驾驶员可以放开双手双脚,看着车辆自动前行。从欧洲各地通过公开道路行驶抵达荷兰鹿特丹,将卡车编队技术展示在公众视野之中。奔驰、沃尔沃、曼、斯堪尼亚、达夫、依维柯6家品牌车企分别派出自家的卡车参加挑战赛。
• 欧洲2017年启动ENSEMBLE项目,对多品牌卡车编队进行测试,参与厂商包括所有6欧家卡车厂商(DAF、Daimler、 Iveco、Man、Scania、Volvo)。
• 斯堪尼亚公司2016年的示范项目就已经展示了编队双挂列车的可能性。不断发展的适用于单挂牵引车运营的安全技术同样适用于LCVs。

2016 斯堪尼亚编队双挂列车示范 (Scania)
• MAN公司在2018年6月开始卡车列队跟驰验证试验。
• 戴姆勒2018年9月宣布在美国开放道路实施列队跟驰试验。
• 戴姆勒在2019年CES展上宣布在经过数千英里的公路测试之后,得出的结论是卡车队列行驶没有可行的商业案例,理由主要出于经济性效果不佳、有人驾驶固有缺陷等原因。转而全力推进L4级自动驾驶技术开发。基于戴姆勒的行业领先地位及其多年编队行驶开发、测试经验,其判断结果对行业和卡车编队技术的发展带来了很大冲击,卡车编队行驶技术再一次站上了何去何从的分水岭。
• 大陆集团与克诺尔集团合作,所进行的商用车编队行驶项目测试主要演示五种自动驾驶功能:成形编队、编队巡航驾驶、车队高级紧急制动、单独车辆分离编队。计划从2020年开始,大陆集团和克诺尔集团将准备与商用车整车制造商共同开发适用于大规模量产的商用车编队行驶系统方案。

大陆、克诺尔编队行驶项目测试
5. 中国
目前自动驾驶技术公司无专门针对卡车列队跟驰的技术企业,主要是几家OEM厂商与自动驾驶技术企业合作来测试列队跟驰技术,基本上处于早期阶段,技术水平相对落后。

中国卡车列队跟驰试验东风公司车辆
2019年5月7日,国家标准《智能网联汽车 自动驾驶功能测试方法及要求 第3部分列队 跟驰功能》,即我国首次大规模商用车列队跟驰标准公开验证试验在天津市西青区举行。
东风商用车、福田、中国重汽三家重卡企业每家企业派出3辆重卡,总计9辆车参与。
试验项目包括列队加速试验、列队变道试验、列队减速试验。
2 作者评论
1. 卡车列队跟驰并无统一定义,可能涉及的形式变量包括:前车有无人、后车有无人、编队车辆数量、编队产品品牌、车辆类型、行驶道路类型、车间距离、是否可自动恢复编队等等,不同厂商作出了不同尝试。
2. 从作用效果来说,后车有人的列队跟驰技术难度相对最低,主要解决改善后车驾驶员工作强度、提高队列车辆燃油经济性的问题;前车有人后车无人的列队跟驰技术难度适中,主要解决驾驶员人工成本问题,同时提高效率、改善燃油经济性;前车无人后车无人的列队跟驰技术难度最高,改善人工成本、效率、燃油经济性效果最佳。
3. 近期日本卡车后车无人列队跟驰测试的成功,是卡车列队跟驰技术的一个巨大进步,主要体现在后车无人技术的验证,通过缩短间距、发出警示来避免其他车辆插队,并且当无法维持编队时能够安全停车,为DDT Fallback提出了有益参考。
4. 卡车队列行驶有着自己的特殊性,虽然严重依赖自动驾驶技术整体水平的提升,但同时也要解决自己特有的问题,例如安全性、燃油经济性、适应不同车辆形式和环境等等。
5. 虽然目前卡车列队跟驰技术进展尚不尽人意,但该项技术具有极大的社会经济效益,中国应将其列入国家主推的开发规划,开发适应不同技术和应用水平的列队跟驰技术并推广应用。
6. 列队跟驰技术最终的开发目标是多车无人列队跟驰。
近期日本完成了“卡车后车无人列队跟驰”开放道路验证测试,藉此契机本文对列队跟驰技术在世界主要国家地区的发展历程和近期动向进行了汇总介绍,并对列队跟驰技术的发展现状和前景进行了简单评述。
卡车列队跟驰(truck Platooning),又称队列行驶、列队行驶、列队跟驰、编队驾驶、卡车列车等,2辆或以上卡车通过DSRC等车间通信(V2V)进行通讯,将前车的加减速等动作信息及车速、位置信息实时传递给后车并利用自适应巡航、车道偏离报警、自动制动等ADAS辅助系统对后车进行自动整体控制,以近距离间距编队形式在道路上行驶,可分为后车有驾驶员的有人编队行驶以及后车无驾驶员的无人编队行驶。
编队行驶的基本技术原理是将单一车道内的相邻车辆进行编队,根据相邻车辆信息自动调整该车辆的纵向运动状态,最终达到一致的行驶速度和期望的几何构型。
列队跟驰主要应用场景在高速公路,因为高速公路属于封闭式场所,虽然不确定性因素众多,但相对国道、省道等路线,其显然更合适编队行驶。
商用车列队跟驰作为自动驾驶率先应用的领域,可有效控制车辆之间的距离和车队的行驶状态,减小车队行驶中的风阻,从而降低车辆的燃油消耗。。同时,列队跟驰的应用也将大大降低驾驶员的工作强度,提升驾驶安全性,降低商用车运营成本。
因此,卡车列队跟驰技术得到了各国及众多企业的重视。
1 世界各国列队跟驰技术进展汇总
伴随着自动驾驶技术的兴起,各国以及众多企业均对卡车列队跟驰技术进行了开发和测试。
车辆编队行驶的早期研究始于1980年代美国加州的PATH项目,之后的研究包括欧洲的SARTRE项目,日本的Energy ITS 项目以及荷兰的GCDC项目等,如图所示。
1. 美国
美国交通部(USDOT)将卡车编队行驶视为自动驾驶车辆在货运行业的重要早期应用。2016年9月20日,USDOT发布了其联邦自动化车辆政策,它将促进技术研究、测试、应用,其中就包括了与双卡车编队相关的内容。2018年发布的联邦自动化车辆政策AV 3.0版中,也多处涉及编队行驶。目前,美国已有二十多个州立法允许公开道路卡车编队行驶。
Peloton公司列队跟驰车辆
美国的Peloton是专业挑战卡车队列行驶技术的初创公司。2019年Peloton Technology Inc.发布了新的L4级Automated Following(自动列队跟驰)解决方案,使驾驶员可以控制两辆卡车。Peloton Automated Following是一个先进的队列行使系统,利用V2V通信和雷达主动制动系统,并结合车辆控制算法,使单个驾驶员能够驾驶两辆卡车,实现互联驾驶,从而提高空气动力学、燃油经济性和安全性。
Automated Following利用了部署商用L1级列队系统PlatoonPro的经验。该系统是一个SAE L4级自动驾驶解决方案,连接一辆全自动跟随行驶的卡车与一辆由驾驶员控制的领头卡车,使两辆卡车列队行驶。V2V链接允许由驾驶员驾驶的领头卡车引导随行卡车进行转向、加速和制动,并连接卡车之间的安全系统。并且延迟时间短。Peloton独特的方法将领头卡车中的人类驾驶员经验与最先进的传感器和随行卡车中的硬件结合起来,极大简化了部署独立SAE L4级自动驾驶系统的许多技术挑战。该解决方案能适应各种路线、天气条件和交通条件,比单个车辆L4级解决方案扩展速度更快。
Locomation公司列队跟驰车辆
卡车技术供应商Locomation公司2020年8月和美国卡车物流公司Wilson Logistics进行了一次试点计划,首次使用了ARC系统运送商业货物,两辆Wilson Logistics卡车(后车有驾驶员)沿着I-84高速公路行驶了420英里(约675公里)。Locomation公司的商用系统「Autonomous Relay Convoy」(ARC系统)只需要一名驾驶员驾驶牵头卡车,而随后的数辆卡车以全自动驾驶的方式进行跟随行驶。使用专用近距离通信(DSRC)技术互相连接。
当ARC系统启用时,只有领头驾驶员主动参与驾驶。随行卡车则由ACR系统控制,其驾驶员会可以交出车辆控制权,此时,跟随行卡车达到L4自动驾驶级别。经过设定的时间间隔后,两辆卡车互换位置。第二名驾驶员会接管车队的控制权,而此前领头车辆的驾驶员就可以交出控制权。
Locomation公司2020年10月宣布计划在2022年实现自动驾驶列队跟驰卡车商业化。
2. 日本
日本在“未来战略投资2017”中提出最早在2022年实现卡车编队行驶的商业化,后期一直在加速进行验证试验。近期主要相关政策包括:
• 官民ITS构想-路线图2018
• 自动驾驶相关制度整备大纲
• 第2期SIP自动驾驶(系统与服务的拓展)
日本的列队跟驰技术由国家主导推动,从2016年正式展开由国土交通省和经济产业省主导的卡车编队相关业务,并于2018年1月进行了首次多品牌卡车编队测试,参与的OEM厂商包括多家商用车企业,例如日野、三菱扶桑、UD、五十铃等,丰田通商接受日本经济产业省“面向高度自动行驶系统社会实装的研究开发验证事业:卡车列队跟驰社会实装验证” (「高度な自動走行システムの社会実装に向けた研究開発・実証事業:トラックの隊列走行の社会実装に向けた実証」)项目委托,自2016年开始推进相关研究开发。
丰田通商2018年6月28日已发布过在茨城县的产业技术综合研究所测试道路上实现了卡车后车无人列队跟驰技术。2019年1月开始日本国内首次后车无人卡车列队跟驰开放道路验证。
日本国土交通省和经济产业省2021年3月5日发布消息,在日本新东名高速的部分区段上成功实现了“后车无人列队跟驰”(列队跟驰又称编队行驶、队列行驶等)验证测试。
日本后车无人列队跟驰测试
软银5G列队跟驰测试
此外,2019年6月,软银在新东名高速上成功实现世界首次应用5G通讯卡车列队跟驰验证试验,成功实现车间距自动控制。
3. 韩国
现代列队跟驰测试
现代汽车公司2019年11月在在韩国京畿道骊州市智能高速公路上成功进行了该公司首个卡车编队试验,试验中采用了两辆连接拖车的Xcient牵引车。
当后方卡车接近领头卡车时,编队模式就会启动,编队操作就会开始。一旦编队模式启动,后方卡车会与前方卡车保持16.7米的距离,并根据领头车辆的加减速情况实时微调。驾驶员无需踩油门或刹车,极大地减轻了在道路上的疲劳,提高了安全性。此外,该模式还会激活车道保持技术,让后方车辆驾驶员的手能够离开方向盘。
有了车辆编队技术,还可以无缝管理其他车辆在卡车之间插入或插出。如果一辆车突然插入了卡车车队中,后方卡车会自动将其与领头卡车的距离扩大到至少25米。如果领头卡车由于意外情况,突然紧急停车,该技术还可以让后方跟随的卡车减速并停下。
4. 欧洲
欧洲是最早推进卡车列队跟驰技术开发的地区,早在2009年9月,欧盟就启动了周期跨度3年的SARTRE(Safe Road Trains for the Environment)交通改善项目,旨在开发安全环保的公路行车列队技术,希望解决环保、安全、交通拥堵这三个基本问题,同时从提升驾驶舒适度这一角度出发鼓励驾驶者接受这项技术。
之后欧盟和行业协会均有资助或推动卡车列队跟驰验证项目,各家OEM厂商均参与,ZF等供应商也一同参与。目前验证项目已获得很大进展,但戴姆勒出于实用化效益原因已宣布终止继续开发该技术。
欧盟2016卡车队列挑战活动
• 由欧洲汽车制造商协会(ACEA)组织的“2016卡车队列挑战活动”, 每三辆卡车为一组,在公路上列队依次前进,只需要第一辆车驾驶员控制车辆,后面两辆车利用无线通讯技术实现同步跟随,驾驶员可以放开双手双脚,看着车辆自动前行。从欧洲各地通过公开道路行驶抵达荷兰鹿特丹,将卡车编队技术展示在公众视野之中。奔驰、沃尔沃、曼、斯堪尼亚、达夫、依维柯6家品牌车企分别派出自家的卡车参加挑战赛。
• 欧洲2017年启动ENSEMBLE项目,对多品牌卡车编队进行测试,参与厂商包括所有6欧家卡车厂商(DAF、Daimler、 Iveco、Man、Scania、Volvo)。
• 斯堪尼亚公司2016年的示范项目就已经展示了编队双挂列车的可能性。不断发展的适用于单挂牵引车运营的安全技术同样适用于LCVs。
2016 斯堪尼亚编队双挂列车示范 (Scania)
• MAN公司在2018年6月开始卡车列队跟驰验证试验。
• 戴姆勒2018年9月宣布在美国开放道路实施列队跟驰试验。
• 戴姆勒在2019年CES展上宣布在经过数千英里的公路测试之后,得出的结论是卡车队列行驶没有可行的商业案例,理由主要出于经济性效果不佳、有人驾驶固有缺陷等原因。转而全力推进L4级自动驾驶技术开发。基于戴姆勒的行业领先地位及其多年编队行驶开发、测试经验,其判断结果对行业和卡车编队技术的发展带来了很大冲击,卡车编队行驶技术再一次站上了何去何从的分水岭。
• 大陆集团与克诺尔集团合作,所进行的商用车编队行驶项目测试主要演示五种自动驾驶功能:成形编队、编队巡航驾驶、车队高级紧急制动、单独车辆分离编队。计划从2020年开始,大陆集团和克诺尔集团将准备与商用车整车制造商共同开发适用于大规模量产的商用车编队行驶系统方案。
大陆、克诺尔编队行驶项目测试
5. 中国
目前自动驾驶技术公司无专门针对卡车列队跟驰的技术企业,主要是几家OEM厂商与自动驾驶技术企业合作来测试列队跟驰技术,基本上处于早期阶段,技术水平相对落后。
中国卡车列队跟驰试验东风公司车辆
2019年5月7日,国家标准《智能网联汽车 自动驾驶功能测试方法及要求 第3部分列队 跟驰功能》,即我国首次大规模商用车列队跟驰标准公开验证试验在天津市西青区举行。
东风商用车、福田、中国重汽三家重卡企业每家企业派出3辆重卡,总计9辆车参与。
试验项目包括列队加速试验、列队变道试验、列队减速试验。
2 作者评论
1. 卡车列队跟驰并无统一定义,可能涉及的形式变量包括:前车有无人、后车有无人、编队车辆数量、编队产品品牌、车辆类型、行驶道路类型、车间距离、是否可自动恢复编队等等,不同厂商作出了不同尝试。
2. 从作用效果来说,后车有人的列队跟驰技术难度相对最低,主要解决改善后车驾驶员工作强度、提高队列车辆燃油经济性的问题;前车有人后车无人的列队跟驰技术难度适中,主要解决驾驶员人工成本问题,同时提高效率、改善燃油经济性;前车无人后车无人的列队跟驰技术难度最高,改善人工成本、效率、燃油经济性效果最佳。
3. 近期日本卡车后车无人列队跟驰测试的成功,是卡车列队跟驰技术的一个巨大进步,主要体现在后车无人技术的验证,通过缩短间距、发出警示来避免其他车辆插队,并且当无法维持编队时能够安全停车,为DDT Fallback提出了有益参考。
4. 卡车队列行驶有着自己的特殊性,虽然严重依赖自动驾驶技术整体水平的提升,但同时也要解决自己特有的问题,例如安全性、燃油经济性、适应不同车辆形式和环境等等。
5. 虽然目前卡车列队跟驰技术进展尚不尽人意,但该项技术具有极大的社会经济效益,中国应将其列入国家主推的开发规划,开发适应不同技术和应用水平的列队跟驰技术并推广应用。
6. 列队跟驰技术最终的开发目标是多车无人列队跟驰。



编辑推荐




最新资讯
-
中汽中心工程院能量流测试设备上线全新专家
2025-04-03 08:46
-
上新|AutoHawk Extreme 横空出世-新一代实
2025-04-03 08:42
-
「智能座椅」东风日产N7为何敢称“百万级大
2025-04-03 08:31
-
基于加速度计补偿的俯仰角和路面坡度角估计
2025-04-03 08:30
-
《北京市自动驾驶汽车条例》正式实施 L3级
2025-04-02 20:23
