




 广告
广告





















































微镜MEMS激光雷达相机上天下地,有望进入汽车视野
2021-03-24 11:05:04· 来源:智车科技 作者:刘洪

/ 导读 /激光雷达(LiDAR)无疑是当今自动驾驶汽车和机器人市场上一个时髦的词汇,其理由相当充分。3月4日,火星表面首次试行驶的NASA(美国国家航空航天局)毅
/ 导读 /
激光雷达(LiDAR)无疑是当今自动驾驶汽车和机器人市场上一个时髦的词汇,其理由相当充分。3月4日,火星表面首次试行驶的NASA(美国国家航空航天局)“毅力号”(Perseverance)就搭载了一种计算机视觉创新实现的类似于激光雷达的探测器。“毅力号”于去年7月发射,今年2月在火星成功着陆。

“毅力号”在火星表面首次试行驶
1 激光雷达变化多端
随着技术的进步,激光雷达出现了多种变体,“毅力号”采用的是MEMS激光雷达,归类为“扫描式激光雷达”,而不是非扫描式激光雷达。
为了更好地了解这一技术,还得从头说起。扫描式激光雷达可以引导激光束覆盖广阔的区域,以有效捕捉大视场(FOV)。这个过程本身可以采用机械或非机械扫描的形式。前者利用激光系统中的运动部件,体积很大;后者没有运动部件,体积小巧。
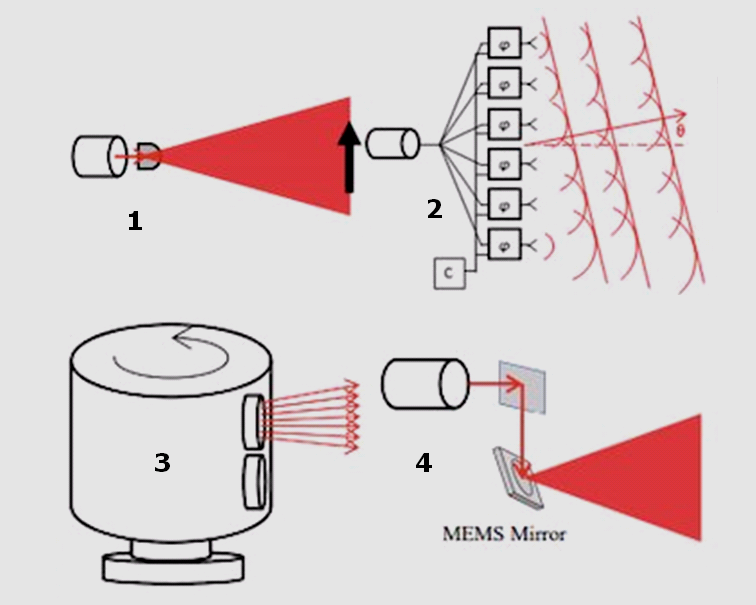
1.闪光激光雷达;2.光学相控阵(OPA)激光雷达;3.机动扫描激光雷达;4.MEMS激光雷达
对于许多应用来说,MEMS激光雷达已被证明是一个有用的解决方案,因为它在一个小型封装中提供了高速度、小尺寸、高分辨率的特性,可以满足很多应用(如汽车)必不可少的要求。
2 业界最小的投影引擎
早在2015年,意法半导体(STMicroelectronics)就透露了其开发的微镜可以在感知计算中提供更高精确性,并宣布将为英特尔的感知计算计划提供微镜和控制器件。
纳米激光加微型反射镜
除了ASIC控制器件外,ST还提供了一个微小的MEMS扫描镜,它每秒移动数千次来扫描红外线光束,在它前面的物体上画出一个不可见的网格。从物体反射回来的光被捕获并进行分析,用于3D成像和手势应用。
利用MEMS技术来实现反射镜,可以将具有高性能和低能耗特性的小型稳固系统用于各种消费类设备,为人与技术的自然互动创造了新的维度。
MEMS将机械和电气原理融合到微型机器中,可以感知运动、环境或驱动移动液体(如喷墨热敏打印头)或物体(如投影系统中的镜子)。新器件中的“机器”是一个非常小的镜子,它用与能够让我们的头发竖立起来的静电原理驱动。
ST的MEMS专业技术帮助英特尔开发出业界最小、最纤细的投影引擎,可安装在笔记本电脑或平板电脑的屏幕上,并提供超宽的视野。此外,采用ST最先进的智能电源技术制造的微镜,在硅片上安装了特殊的静电驱动,极低的功耗和硬件安全机制,可防止故障黑和客攻击。
英特尔深度相机工程总监Sagi Ben Moshe说:“感知计算带来的自然用户界面革命即将到来,ST开发的微镜技术是一项重要贡献。我们和合作伙伴正在重新定义人们如何通过一流的深度传感器与设备交互,以实现游戏、娱乐和内容创作。该传感器可为PC和平板电脑提供全新的、沉浸式体验的3D视觉。”
ST模拟、MEMS和传感器部门执行副总裁兼总经理Benedetto Vigna说:“利用影响深远的MEMS技术,我们多年来通过运动、触摸和声音为用户界面的重大进步做出了贡献,感知计算的采用增加了3D视觉,是一个令人兴奋的飞跃。ST的全方位专业知识解决了功率、驱动、惯性和抖动方面的各种难题,构建了正确的微镜,并将模拟前端和数字逻辑集成到单个低功耗芯片上,以实现主流设备集成所需的尺寸。”
3 多年修成正果
历经六年的研发,英特尔和ST推出了一款高分辨率MEMS激光雷达相机——Intel® RealSense™高分辨率激光雷达深度相机L515。我们来看看这款激光雷达的设计细节。
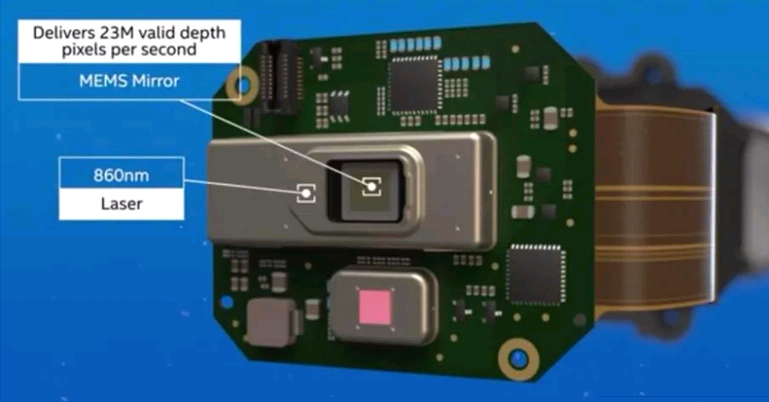
Intel RealSense L515由ST的MEMS扫描镜驱动
被誉为世界上最小的微镜扫描产品的L515每秒可捕获数百万个深度点,可以对环境进行空间扫描。基于微镜的激光雷达系统为工业应用提供高分辨率扫描,例如用于垃圾箱拣选、体积测量、物流和3D扫描的机械臂。
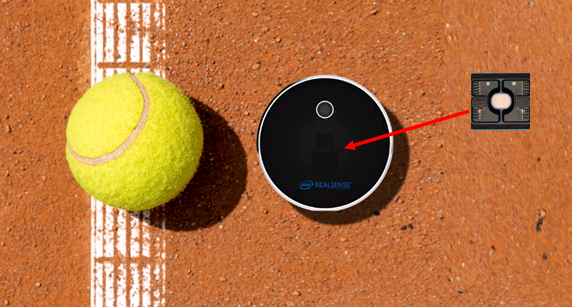
内置于L515中的小尺寸ST微镜帮助英特尔实现了冰球大小(直径61mm x高度26mm)的产品尺寸。微镜可以在整个视野内进行连续的激光扫描。通过与定制光电二极管传感器的结合,L515可以渲染整个场景的3D深度图。
Vigna说:“ST公司的第二代微镜每秒30帧,视场为70°×55°。L515利用ST的MEMS扫描功能,提供无插值像素的高分辨率深度、控制视野的能力,并提供由低50ns曝光时间驱动的接近零的像素模糊(pixel blur)。”
英特尔新兴成长孵化部门首席孵化官、公司副总裁兼总经理Sagi BenMoshe说:“英特尔RealSense™ 技术已被用于开发用于机器人、物流、扫描和其他计算机视觉应用的产品和解决方案。L515采用ST的微镜提供无与伦比的精度,是世界上最小的高分辨率激光雷达深度相机,使其适用于各种使用场景。”
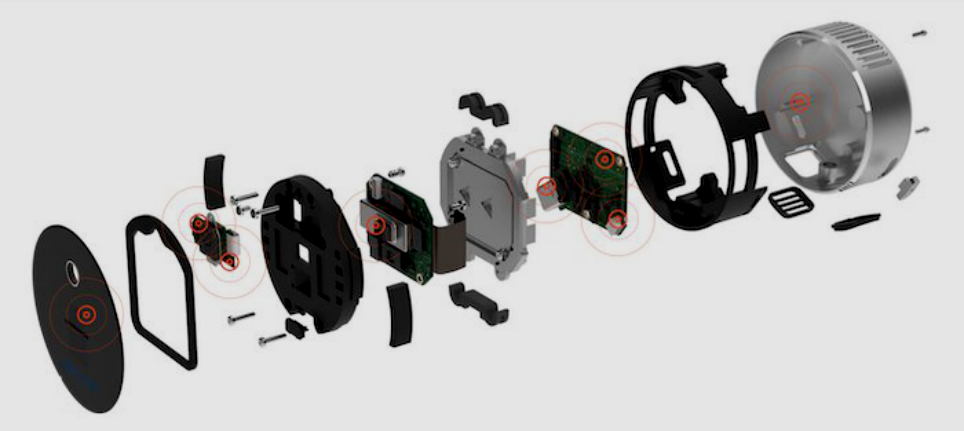
Intel RealSense激光雷达相机L515结构
据介绍,该相机射程可以达到9米,深度精度大于14毫米,同时还能测量230万个深度点。MEMS扫描镜为激光雷达打开了许多应用大门,特别是其紧凑的尺寸无疑带来了更多应用机会。
4 MEMS扫描镜如何工作?
MEMS激光雷达是激光雷达的一种准机械形式,不像激光雷达的旋转结构,激光本身不发生物理运动,而是通过移动MEMS扫描镜(反射镜)来控制和调制激光,而系统的其余部分都是静止的。
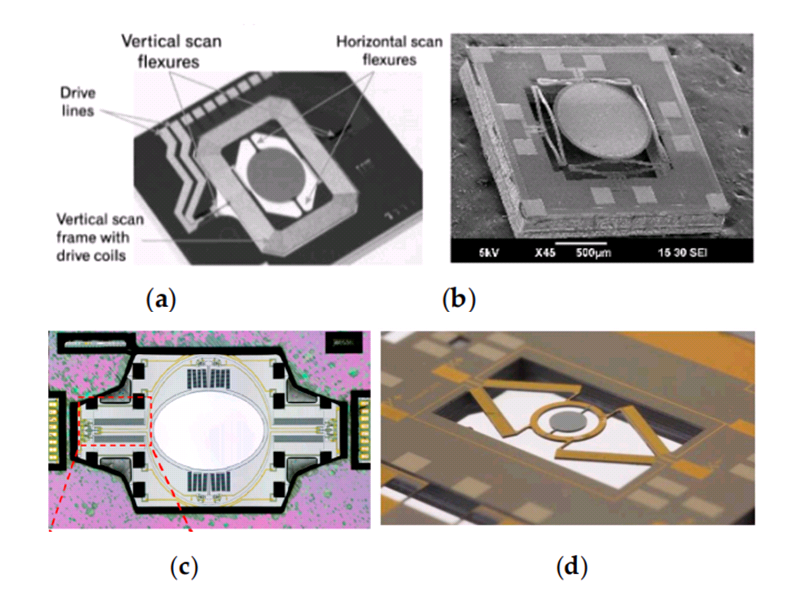
高FoM(品质因数)2D准静态谐振扫描MEMS扫描镜:(a)电磁致动器;(b)电热致动器;(c)静电致动器;(d)压电致动器
MEMS是什么?是微机电系统,其最大特点就是“微型”,所以它也叫微电子机械系统、微系统、微机械等,是尺寸在几毫米乃至更小的微型装置。MEMS的内部结构一般在微米甚至纳米量级,是一种独立的智能系统(芯片)。
对于扫描式激光雷达而言,MEMS扫描镜是决定视野的关键因素。ST的微镜技术是英特尔RealSense LiDAR相机L515成功的关键因素。那么,这些器件在系统级是如何工作的呢?
MEMS扫描镜非常紧凑,与其他机械扫描激光雷达方法相比,其系统尺寸更小,控制速度更快,光转向更精确。MEMS扫描镜通常需要一个高压驱动IC来控制镜面的位置。例如,典型MEMS扫描镜需要200V-300V范围的驱动电压。高压镜驱动器从系统中的微控制器或FPGA获得输入,该驱动器负责确定需要施加的驱动电压。同一微控制器还负责控制驱动同步操作的激光二极管和扫描镜。高分辨率数字模拟转换器(DAC)连接控制器的数字输出与放大器的模拟输入,其功能取决于系统的分辨率和速度要求。在闭环系统中,光电二极管可用于反馈。
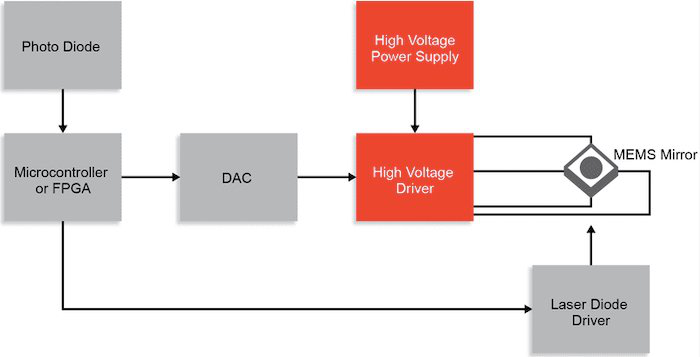
典型MEMS扫描镜系统框图
5 天上飞的地上跑的都能用
这项计算机视觉的创新技术不仅为英特尔的消费类电子产品提供了前所未有的功能,也为NASA的火星探测器扩大了视野。在下降过程中,火星探测器使用激光雷达创建着陆点地图,当火星探测器接近地表时,激光雷达会对地表拍照,并将所看到的情况与地图进行比较。然后,火星探测器将搜索另一个安全着陆区的机载地图,使其能够重定向并在最安全的区域着陆。

“毅力号”依靠AI和计算机视觉实现“迄今为止最精确的着陆”
事实上,“毅力号”火星探测器的大小就相当于一辆大型SUV,上面还搭载了其他类型的传感器用来搜索生物信号,包括采用高精度变焦技术的Mastcam-Z超级摄像头,可以向感兴趣的物体发射激光,并产生小的等离子云,科学家可以据此对其进行分析,以确定物体的化学成分。
至于微镜MEMS激光雷达,既然可以用在火星探测器上,地上跑的车辆当然更能用,英特尔不是也提到了“物流”吗?
激光雷达(LiDAR)无疑是当今自动驾驶汽车和机器人市场上一个时髦的词汇,其理由相当充分。3月4日,火星表面首次试行驶的NASA(美国国家航空航天局)“毅力号”(Perseverance)就搭载了一种计算机视觉创新实现的类似于激光雷达的探测器。“毅力号”于去年7月发射,今年2月在火星成功着陆。
“毅力号”在火星表面首次试行驶
1 激光雷达变化多端
随着技术的进步,激光雷达出现了多种变体,“毅力号”采用的是MEMS激光雷达,归类为“扫描式激光雷达”,而不是非扫描式激光雷达。
为了更好地了解这一技术,还得从头说起。扫描式激光雷达可以引导激光束覆盖广阔的区域,以有效捕捉大视场(FOV)。这个过程本身可以采用机械或非机械扫描的形式。前者利用激光系统中的运动部件,体积很大;后者没有运动部件,体积小巧。
1.闪光激光雷达;2.光学相控阵(OPA)激光雷达;3.机动扫描激光雷达;4.MEMS激光雷达
对于许多应用来说,MEMS激光雷达已被证明是一个有用的解决方案,因为它在一个小型封装中提供了高速度、小尺寸、高分辨率的特性,可以满足很多应用(如汽车)必不可少的要求。
2 业界最小的投影引擎
早在2015年,意法半导体(STMicroelectronics)就透露了其开发的微镜可以在感知计算中提供更高精确性,并宣布将为英特尔的感知计算计划提供微镜和控制器件。
纳米激光加微型反射镜
除了ASIC控制器件外,ST还提供了一个微小的MEMS扫描镜,它每秒移动数千次来扫描红外线光束,在它前面的物体上画出一个不可见的网格。从物体反射回来的光被捕获并进行分析,用于3D成像和手势应用。
利用MEMS技术来实现反射镜,可以将具有高性能和低能耗特性的小型稳固系统用于各种消费类设备,为人与技术的自然互动创造了新的维度。
MEMS将机械和电气原理融合到微型机器中,可以感知运动、环境或驱动移动液体(如喷墨热敏打印头)或物体(如投影系统中的镜子)。新器件中的“机器”是一个非常小的镜子,它用与能够让我们的头发竖立起来的静电原理驱动。
ST的MEMS专业技术帮助英特尔开发出业界最小、最纤细的投影引擎,可安装在笔记本电脑或平板电脑的屏幕上,并提供超宽的视野。此外,采用ST最先进的智能电源技术制造的微镜,在硅片上安装了特殊的静电驱动,极低的功耗和硬件安全机制,可防止故障黑和客攻击。
英特尔深度相机工程总监Sagi Ben Moshe说:“感知计算带来的自然用户界面革命即将到来,ST开发的微镜技术是一项重要贡献。我们和合作伙伴正在重新定义人们如何通过一流的深度传感器与设备交互,以实现游戏、娱乐和内容创作。该传感器可为PC和平板电脑提供全新的、沉浸式体验的3D视觉。”
ST模拟、MEMS和传感器部门执行副总裁兼总经理Benedetto Vigna说:“利用影响深远的MEMS技术,我们多年来通过运动、触摸和声音为用户界面的重大进步做出了贡献,感知计算的采用增加了3D视觉,是一个令人兴奋的飞跃。ST的全方位专业知识解决了功率、驱动、惯性和抖动方面的各种难题,构建了正确的微镜,并将模拟前端和数字逻辑集成到单个低功耗芯片上,以实现主流设备集成所需的尺寸。”
3 多年修成正果
历经六年的研发,英特尔和ST推出了一款高分辨率MEMS激光雷达相机——Intel® RealSense™高分辨率激光雷达深度相机L515。我们来看看这款激光雷达的设计细节。
Intel RealSense L515由ST的MEMS扫描镜驱动
被誉为世界上最小的微镜扫描产品的L515每秒可捕获数百万个深度点,可以对环境进行空间扫描。基于微镜的激光雷达系统为工业应用提供高分辨率扫描,例如用于垃圾箱拣选、体积测量、物流和3D扫描的机械臂。
内置于L515中的小尺寸ST微镜帮助英特尔实现了冰球大小(直径61mm x高度26mm)的产品尺寸。微镜可以在整个视野内进行连续的激光扫描。通过与定制光电二极管传感器的结合,L515可以渲染整个场景的3D深度图。
Vigna说:“ST公司的第二代微镜每秒30帧,视场为70°×55°。L515利用ST的MEMS扫描功能,提供无插值像素的高分辨率深度、控制视野的能力,并提供由低50ns曝光时间驱动的接近零的像素模糊(pixel blur)。”
英特尔新兴成长孵化部门首席孵化官、公司副总裁兼总经理Sagi BenMoshe说:“英特尔RealSense™ 技术已被用于开发用于机器人、物流、扫描和其他计算机视觉应用的产品和解决方案。L515采用ST的微镜提供无与伦比的精度,是世界上最小的高分辨率激光雷达深度相机,使其适用于各种使用场景。”
Intel RealSense激光雷达相机L515结构
据介绍,该相机射程可以达到9米,深度精度大于14毫米,同时还能测量230万个深度点。MEMS扫描镜为激光雷达打开了许多应用大门,特别是其紧凑的尺寸无疑带来了更多应用机会。
4 MEMS扫描镜如何工作?
MEMS激光雷达是激光雷达的一种准机械形式,不像激光雷达的旋转结构,激光本身不发生物理运动,而是通过移动MEMS扫描镜(反射镜)来控制和调制激光,而系统的其余部分都是静止的。
高FoM(品质因数)2D准静态谐振扫描MEMS扫描镜:(a)电磁致动器;(b)电热致动器;(c)静电致动器;(d)压电致动器
MEMS是什么?是微机电系统,其最大特点就是“微型”,所以它也叫微电子机械系统、微系统、微机械等,是尺寸在几毫米乃至更小的微型装置。MEMS的内部结构一般在微米甚至纳米量级,是一种独立的智能系统(芯片)。
对于扫描式激光雷达而言,MEMS扫描镜是决定视野的关键因素。ST的微镜技术是英特尔RealSense LiDAR相机L515成功的关键因素。那么,这些器件在系统级是如何工作的呢?
MEMS扫描镜非常紧凑,与其他机械扫描激光雷达方法相比,其系统尺寸更小,控制速度更快,光转向更精确。MEMS扫描镜通常需要一个高压驱动IC来控制镜面的位置。例如,典型MEMS扫描镜需要200V-300V范围的驱动电压。高压镜驱动器从系统中的微控制器或FPGA获得输入,该驱动器负责确定需要施加的驱动电压。同一微控制器还负责控制驱动同步操作的激光二极管和扫描镜。高分辨率数字模拟转换器(DAC)连接控制器的数字输出与放大器的模拟输入,其功能取决于系统的分辨率和速度要求。在闭环系统中,光电二极管可用于反馈。
典型MEMS扫描镜系统框图
5 天上飞的地上跑的都能用
这项计算机视觉的创新技术不仅为英特尔的消费类电子产品提供了前所未有的功能,也为NASA的火星探测器扩大了视野。在下降过程中,火星探测器使用激光雷达创建着陆点地图,当火星探测器接近地表时,激光雷达会对地表拍照,并将所看到的情况与地图进行比较。然后,火星探测器将搜索另一个安全着陆区的机载地图,使其能够重定向并在最安全的区域着陆。
“毅力号”依靠AI和计算机视觉实现“迄今为止最精确的着陆”
事实上,“毅力号”火星探测器的大小就相当于一辆大型SUV,上面还搭载了其他类型的传感器用来搜索生物信号,包括采用高精度变焦技术的Mastcam-Z超级摄像头,可以向感兴趣的物体发射激光,并产生小的等离子云,科学家可以据此对其进行分析,以确定物体的化学成分。
至于微镜MEMS激光雷达,既然可以用在火星探测器上,地上跑的车辆当然更能用,英特尔不是也提到了“物流”吗?



编辑推荐




最新资讯
-
中汽中心工程院能量流测试设备上线全新专家
2025-04-03 08:46
-
上新|AutoHawk Extreme 横空出世-新一代实
2025-04-03 08:42
-
「智能座椅」东风日产N7为何敢称“百万级大
2025-04-03 08:31
-
基于加速度计补偿的俯仰角和路面坡度角估计
2025-04-03 08:30
-
《北京市自动驾驶汽车条例》正式实施 L3级
2025-04-02 20:23
