




 广告
广告





















































安波福:面向自动驾驶的卫星架构平台
2021-03-26 14:51:13· 来源:汽车ECU开发

在智能化和网联化的大趋势下,安波福也推出了面向自动驾驶的卫星架构平台。为了满足OEM对自动驾驶的需求,该平台遵循以下原则:1、一个可持续发展的平台:任何为
在智能化和网联化的大趋势下,安波福也推出了面向自动驾驶的卫星架构平台。为了满足OEM对自动驾驶的需求,该平台遵循以下原则:
1、一个可持续发展的平台:任何为未来而构建的ADAS平台都必须使运行在其上的特性能够随着时间的推移而演进和扩展。OEM肯定希望避免将功能从一个平台移植到另一个平台,因为这可能成本高昂。他们还想确保在车辆的整个寿命期内增强ADAS功能,这意味着平台需要具备持续的OTA功能。
2、成本效益:该平台可以从低成本的车辆扩展到高级的车型,可以以最低的成本提供符合法规的要求,同时仍能适应与更高自动化水平相关的高级差异化功能。
3、灵活性。主动安全系统很复杂,需要高度集成。一些OEM正在寻找一种提供即装即用的集成的全系统解决方案, 其他人则希望能够为各个功能指定提供者,或者更好地与特定的开发环境或生态系统集成,这需要一个开放的,对开发人员友好的平台来鼓励创新。安波福的下一代ADAS平台具有灵活性,可以支持这两种方法以及两者之间的所有方法。
基于以上的原则,安波福构建了卫星架构(如图1所示)的ADAS平台。在该架构下,采用不同的传感器配置,来支持不同等级的自动驾驶(如图2所示),例如从Level0/1升级至Level 2仅需增加个雷达传感器和软件适配,其他硬件不变。这样就满足了前面提到的OEM的成本效益要求,覆盖从低端到高端车型的需求。
在软件层面,不管配置如何,这些特性都运行在一个公共的、基于标准的软件框架上,允许自动驾驶层级提升的软件连续性。
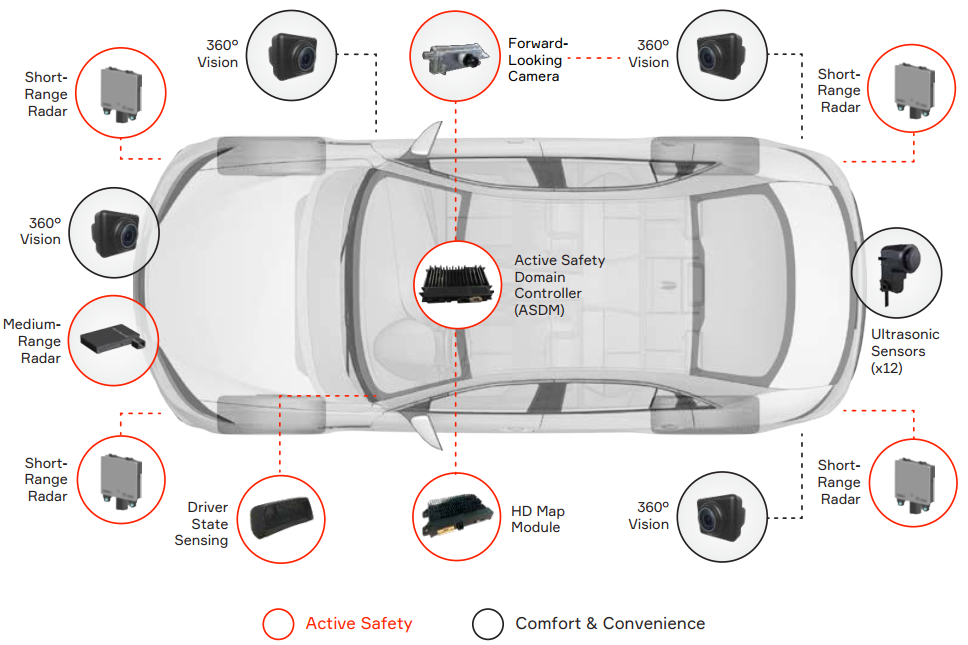
图1 安波福的卫星架构
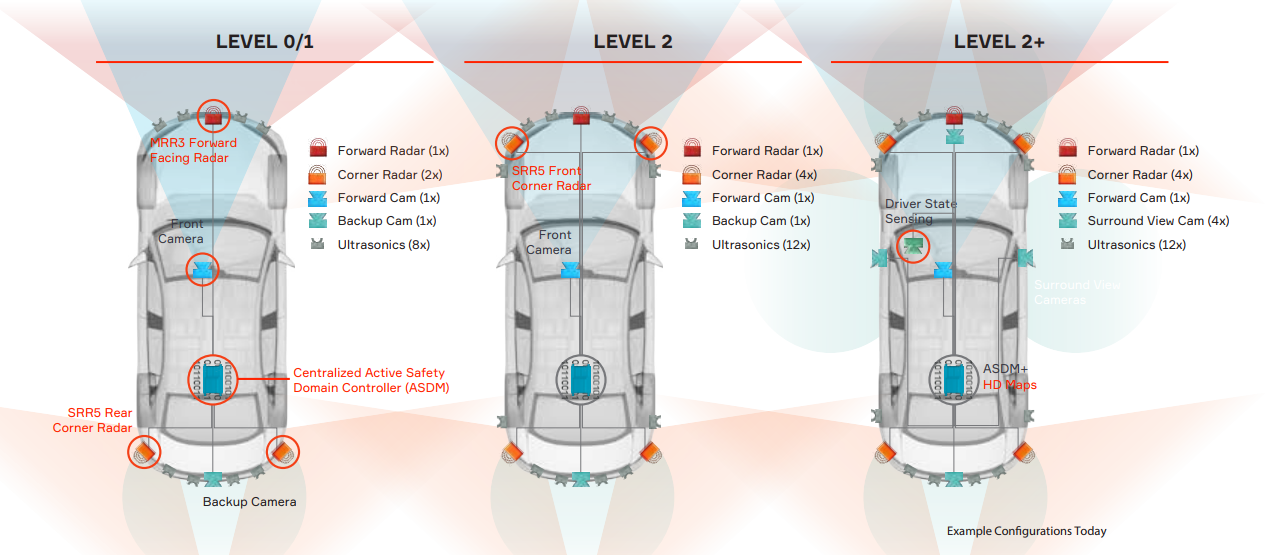
图2 不同Level等级的传感器配置
另外为了提高整个平台集成度以及满足车辆轻量化的要求,该架构中将传统的停车辅助功能模块和周边环视功能模块整合至主动安全的域控制器中,如图3所示。并且对架构中的冗余部件,如电源、外壳和支架进行了消除,降低架构的重量,相较于传统的ADAS平台,卫星架构的重量降低了30%。
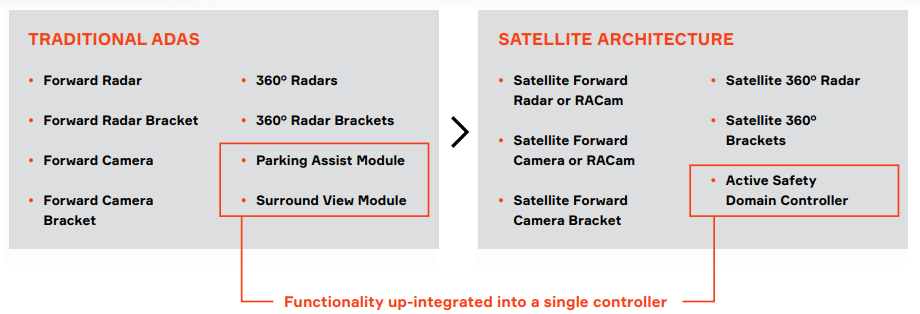
图3 卫星架构中的功能集成
在传感器融合方面,安波福采用集中在域控制器中融合的方案(如图4所示),减少延迟,提高对小型或模糊目标的探测能力,还可以帮助系统准确识别和跟踪多个目标,比如那些在人口密集的城市环境中经常遇到的目标。另外基于机器学习的环境模型,可以使该系统的雷达射程提高50%,能够跟踪200m以外的小目标,而且可以预测图5中被卡车挡住的自行车,这些对高速工况、市内复杂工况很重要。
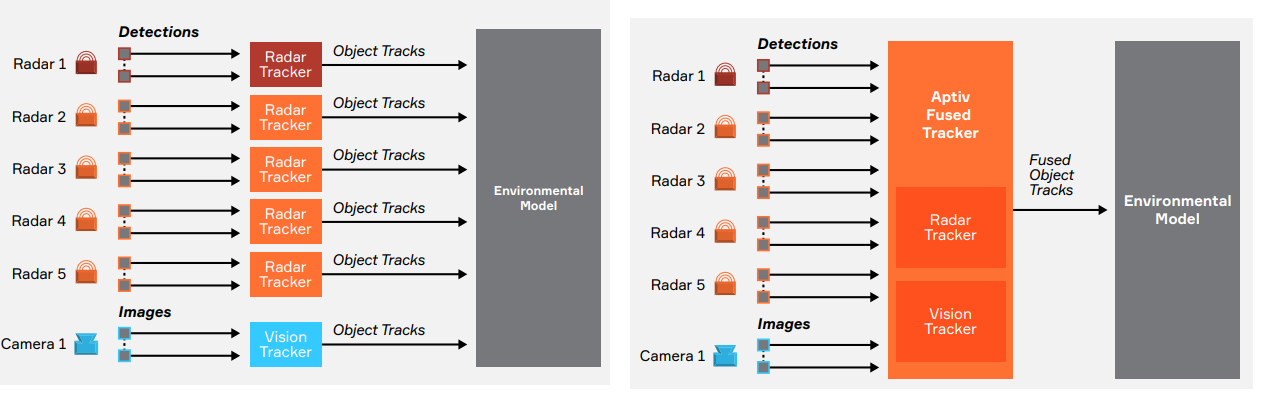
图4 左边为传统的传感器融合方案 右边为安波福的传感器融合方案
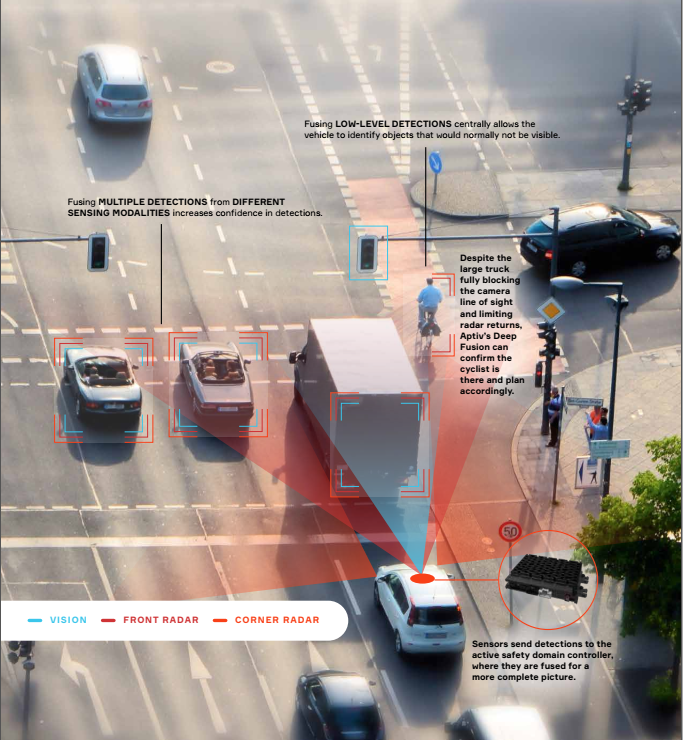
图5
1、一个可持续发展的平台:任何为未来而构建的ADAS平台都必须使运行在其上的特性能够随着时间的推移而演进和扩展。OEM肯定希望避免将功能从一个平台移植到另一个平台,因为这可能成本高昂。他们还想确保在车辆的整个寿命期内增强ADAS功能,这意味着平台需要具备持续的OTA功能。
2、成本效益:该平台可以从低成本的车辆扩展到高级的车型,可以以最低的成本提供符合法规的要求,同时仍能适应与更高自动化水平相关的高级差异化功能。
3、灵活性。主动安全系统很复杂,需要高度集成。一些OEM正在寻找一种提供即装即用的集成的全系统解决方案, 其他人则希望能够为各个功能指定提供者,或者更好地与特定的开发环境或生态系统集成,这需要一个开放的,对开发人员友好的平台来鼓励创新。安波福的下一代ADAS平台具有灵活性,可以支持这两种方法以及两者之间的所有方法。
基于以上的原则,安波福构建了卫星架构(如图1所示)的ADAS平台。在该架构下,采用不同的传感器配置,来支持不同等级的自动驾驶(如图2所示),例如从Level0/1升级至Level 2仅需增加个雷达传感器和软件适配,其他硬件不变。这样就满足了前面提到的OEM的成本效益要求,覆盖从低端到高端车型的需求。
在软件层面,不管配置如何,这些特性都运行在一个公共的、基于标准的软件框架上,允许自动驾驶层级提升的软件连续性。
图1 安波福的卫星架构
图2 不同Level等级的传感器配置
另外为了提高整个平台集成度以及满足车辆轻量化的要求,该架构中将传统的停车辅助功能模块和周边环视功能模块整合至主动安全的域控制器中,如图3所示。并且对架构中的冗余部件,如电源、外壳和支架进行了消除,降低架构的重量,相较于传统的ADAS平台,卫星架构的重量降低了30%。
图3 卫星架构中的功能集成
在传感器融合方面,安波福采用集中在域控制器中融合的方案(如图4所示),减少延迟,提高对小型或模糊目标的探测能力,还可以帮助系统准确识别和跟踪多个目标,比如那些在人口密集的城市环境中经常遇到的目标。另外基于机器学习的环境模型,可以使该系统的雷达射程提高50%,能够跟踪200m以外的小目标,而且可以预测图5中被卡车挡住的自行车,这些对高速工况、市内复杂工况很重要。
图4 左边为传统的传感器融合方案 右边为安波福的传感器融合方案
图5



编辑推荐




最新资讯
-
东风马赫动力完成首个低空无人机项目地面大
2025-04-10 09:06
-
标准解读 | UNECE R116 与 GB 15740-2024
2025-04-10 09:04
-
汽车电子软件开发的三步测试
2025-04-10 08:59
-
动力电池循环寿命法规1号修改单内容详解
2025-04-10 08:56
-
如何有效防止动力电池热失控引发的灾难性后
2025-04-10 08:56
