




 广告
广告





















































Mobileye之真正冗余™:规模化部署自动驾驶汽车的现实路径
2021-03-31 11:19:00· 来源:MOBILEYE

真正冗余什么是真正冗余?传感器冗余的目的是为了确保相互作为彼此的备份,但我们常看到的是互补而非冗余。在这些传感器中,摄像头和雷达/激光雷达都各自感知环境
真正冗余
什么是真正冗余?
传感器冗余的目的是为了确保相互作为彼此的备份,但我们常看到的是互补而非冗余。在这些传感器中,摄像头和雷达/激光雷达都各自感知环境中的特定元素,然后,将其结合起来建立一个环境模型。
而Mobileye的任务是让摄像头和雷达/激光雷达这两个通道同时感知环境中的所有元素,并各自建立同一环境的完整模型,这就是真正冗余。
创建一个环境模型
Mobileye独特环境建模方案是真正冗余的精髓,我们不仅提供真正冗余的传感器,还提供多个真正冗余的环境模型。
实现自动驾驶汽车上路的现实路径
要让自动驾驶汽车安全地在当今道路上行驶,需要极高的安全等级,它们比人类驾驶员的安全性高出几个数量级。为了实现这一目的,需要数亿小时的数据来验证自动驾驶系统。这真的可行吗?Mobileye提议利用真正冗余(True Redundancy)作为替代方法。
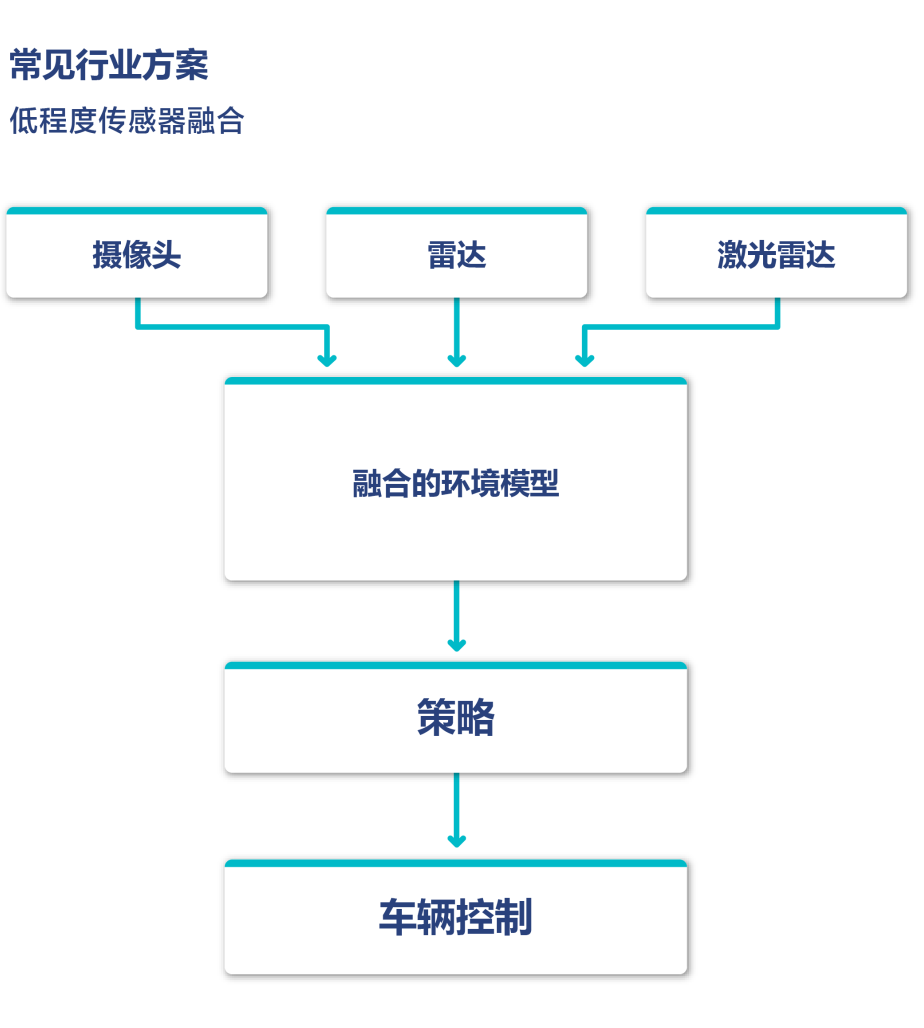
常见行业方案
由于传感器融合是建立在创建的环境模型之前完成,对自动驾驶汽车的每个软件更新,都需要数亿小时的数据进行验证。
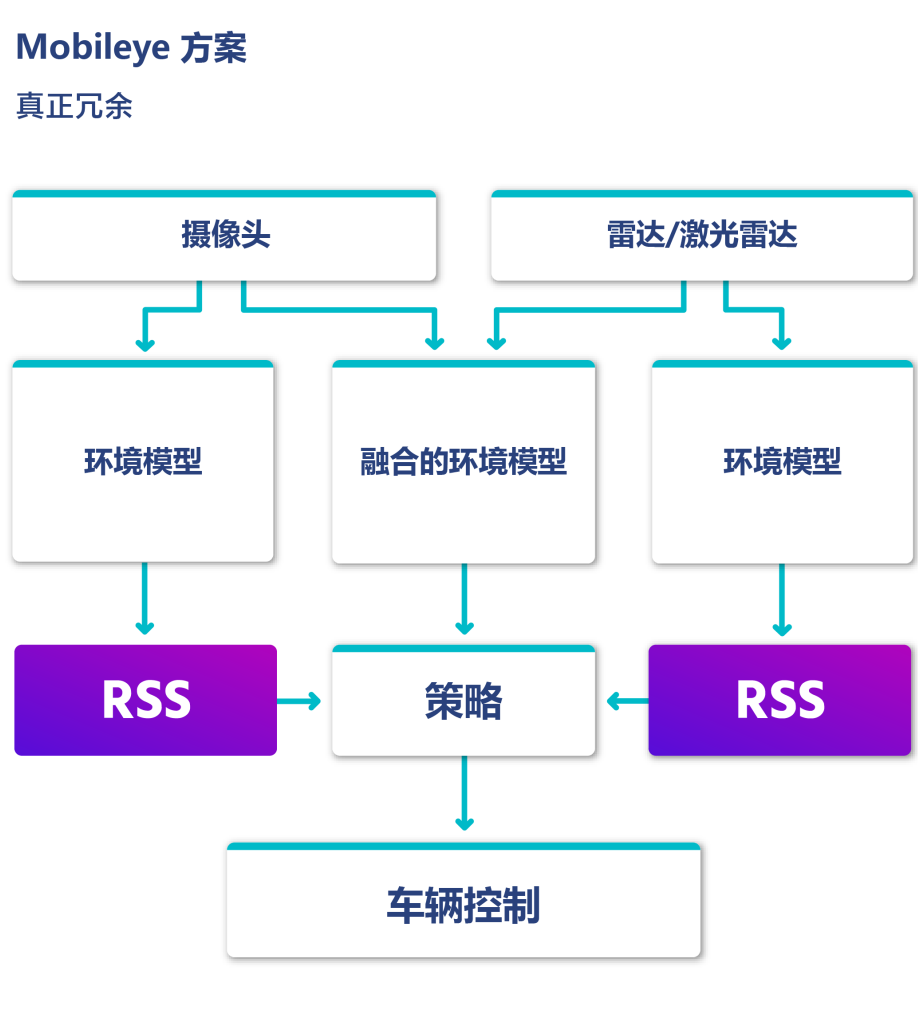
Mobileye方案
真正冗余方案大大减轻了验证负担,只需几万小时的验证,就能显示出系统所需的精度。
“真正冗余具备两大优势:一方面,用于验证感知系统所需的数据量大大减少…。另一方面,当独立系统之一发生故障时,车辆可以安全地继续行驶,而系统融合程度较低的车辆则需立即停车。”——Amnon Shashua
典型案例:
Mobileye SuperVisionTM
凭借我们纯摄像头子系统和环绕式视觉技术,Mobileye SuperVision是第一个可以直接从Mobileye正在进行的自动驾驶汽车的研发中受益的ADAS解决方案。




编辑推荐




最新资讯
-
标准解读丨ISO 21111 《道路车辆车载以太网
2025-03-31 19:15
-
清研精准兆瓦级充放电测试设备——重新定义
2025-03-31 19:13
-
强强联合:imc FAMOS内嵌Python接口,提高
2025-03-31 19:12
-
汽车动力电池与发动机系列标准宣贯会在武汉
2025-03-31 16:08
-
氢内燃机2.0-西南研究院(SwRI)启动第二阶
2025-03-31 16:06
