




 广告
广告





















































丰田从L2演进L3的自动驾驶系统Highway Teammate 1
2021-04-08 15:10:04· 来源:汽车电子设计 作者:朱玉龙

引 言最近丰田发布了两篇文章(见最后的参考文献),是丰田从L2逐步演进到L3的自动驾驶系统Lexus Teammate的一些系统性的介绍,包含硬件配置、软件配置还有控制
引 言
最近丰田发布了两篇文章(见最后的参考文献),是丰田从L2逐步演进到L3的自动驾驶系统“Lexus Teammate”的一些系统性的介绍,包含硬件配置、软件配置还有控制器方面的设计架构。我准备摘录一部分重要的部分内容供大家参考。这是丰田首次采用NVIDIA芯片开发自动驾驶技术的计算平台(基于NVIDIA Xavier),这套系统在主要的其余是按照L2设计的,而在2021年允许L3路试的局面下,通过OTA可以进行L3的系统性测试,也算是和本田的节奏保持同步。

图1 丰田的高速公路 Teammate系统
01 Teammate的传感器配置数据
丰田在传感器的配置上,考虑传感器的配置,一方面要应对环境的变化、识别道路环境和周围物体的准确度,还要考虑冗余识别的功能。同时基于成本的限制,在实际操作中没有使用大量的Lidar(如之前测试过程中使用的那样),因此丰田的解决方案是基于之前的辅助驾驶系统的传感器配置,增加最少的传感器,如下图所示。
1)ADAS基础部件:丰田标配的系统主要包括Poramic View Monitor(PVM)环视摄像头
2)LSS+A(Lexus Safety System + A)主动安全防护系统:这套系统是个基础版本的L2的系统,包括前双目摄像头、前长距离毫米波雷达、4个环绕的毫米波雷达
3)新加入的传感器:主要包括一个激光雷达、一个定位摄像头和一个远距离相机
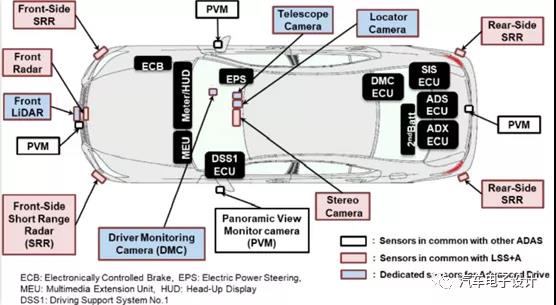
图2 丰田Teammate感知系统配置
这张图里面紫色的感知传感器部分是新加的,而红色部分是复用原有的已经量产搭载的感知系统。
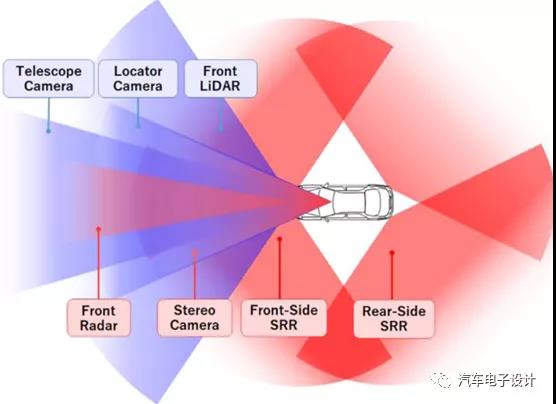
图3 丰田Teammate感知系统的配置
这是新加入的感知传感器的基本参数,远距离摄像头和激光雷达探测距离都设置为250米,感知的间隔为100ms。
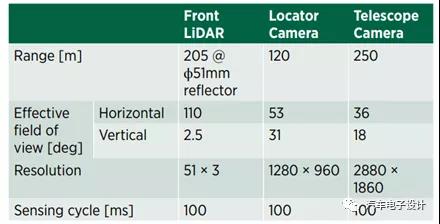
表1 传感器的配置
这里与测试条件相比,Lidar的使用缩减最为明显,从前3后3实际量产只有前向的1个,从这个意义上来看,丰田也是依赖于传感器融合和冗余,视觉是最主要的输入参考。

图4 Teammate的激光雷达的配置
02 冗余和系统处理
在这里丰田做了一个很有趣的设计,这套系统是基于HEV来做的,也就是整车具备高压电池,为了L2丰田配置了2个12V电池,分两组进行供电。1) 执行和通信部分:刹车+转向都是双冗余,双供电;通信也是基于以太网和CAN进行两种不同方式进行备份,并且供电也是分开的
2) 前向识别:其实能看得出来,丰田是分两组进行前向和定位的分析,两组输入两组处理冗余,并且进行了电源的供电分开的结构。
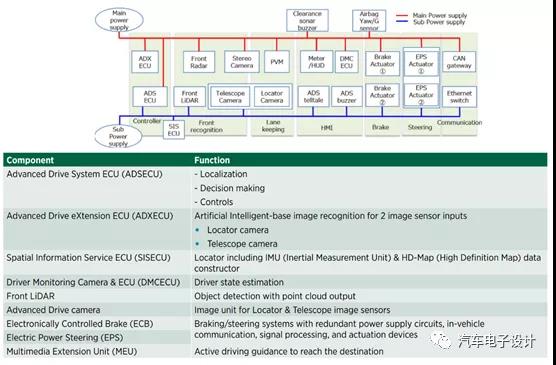
图5 冗余的供电处理
下面这个图看的更清晰,ADS-ECU是核心的处理器,输入几乎所有的感知传感器,ADX-ECU(这个ECU也就是基于Xavier来做的)通过前向的摄像头做一个冗余处理。
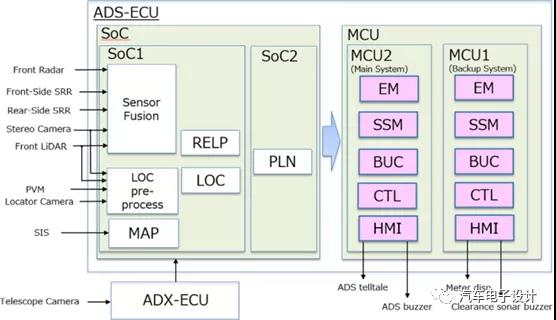
图6 丰田开发的自动驾驶主域控制器
03 小结
先摘录这么多,有空再补充,这个方向上面我们能看到主要的企业都在持续投入,也在独立投入资源开发软件
参考文献:
1)Teammate Advanced Drive System Using Automated Driving Technology
2)System Architecture Design Suitable for Automated Driving Vehicle: Hardware Configuration and Software Architecture Design
最近丰田发布了两篇文章(见最后的参考文献),是丰田从L2逐步演进到L3的自动驾驶系统“Lexus Teammate”的一些系统性的介绍,包含硬件配置、软件配置还有控制器方面的设计架构。我准备摘录一部分重要的部分内容供大家参考。这是丰田首次采用NVIDIA芯片开发自动驾驶技术的计算平台(基于NVIDIA Xavier),这套系统在主要的其余是按照L2设计的,而在2021年允许L3路试的局面下,通过OTA可以进行L3的系统性测试,也算是和本田的节奏保持同步。
图1 丰田的高速公路 Teammate系统
01 Teammate的传感器配置数据
丰田在传感器的配置上,考虑传感器的配置,一方面要应对环境的变化、识别道路环境和周围物体的准确度,还要考虑冗余识别的功能。同时基于成本的限制,在实际操作中没有使用大量的Lidar(如之前测试过程中使用的那样),因此丰田的解决方案是基于之前的辅助驾驶系统的传感器配置,增加最少的传感器,如下图所示。
1)ADAS基础部件:丰田标配的系统主要包括Poramic View Monitor(PVM)环视摄像头
2)LSS+A(Lexus Safety System + A)主动安全防护系统:这套系统是个基础版本的L2的系统,包括前双目摄像头、前长距离毫米波雷达、4个环绕的毫米波雷达
3)新加入的传感器:主要包括一个激光雷达、一个定位摄像头和一个远距离相机
图2 丰田Teammate感知系统配置
这张图里面紫色的感知传感器部分是新加的,而红色部分是复用原有的已经量产搭载的感知系统。
图3 丰田Teammate感知系统的配置
这是新加入的感知传感器的基本参数,远距离摄像头和激光雷达探测距离都设置为250米,感知的间隔为100ms。
表1 传感器的配置
这里与测试条件相比,Lidar的使用缩减最为明显,从前3后3实际量产只有前向的1个,从这个意义上来看,丰田也是依赖于传感器融合和冗余,视觉是最主要的输入参考。
图4 Teammate的激光雷达的配置
02 冗余和系统处理
在这里丰田做了一个很有趣的设计,这套系统是基于HEV来做的,也就是整车具备高压电池,为了L2丰田配置了2个12V电池,分两组进行供电。1) 执行和通信部分:刹车+转向都是双冗余,双供电;通信也是基于以太网和CAN进行两种不同方式进行备份,并且供电也是分开的
2) 前向识别:其实能看得出来,丰田是分两组进行前向和定位的分析,两组输入两组处理冗余,并且进行了电源的供电分开的结构。
图5 冗余的供电处理
下面这个图看的更清晰,ADS-ECU是核心的处理器,输入几乎所有的感知传感器,ADX-ECU(这个ECU也就是基于Xavier来做的)通过前向的摄像头做一个冗余处理。
图6 丰田开发的自动驾驶主域控制器
03 小结
先摘录这么多,有空再补充,这个方向上面我们能看到主要的企业都在持续投入,也在独立投入资源开发软件
参考文献:
1)Teammate Advanced Drive System Using Automated Driving Technology
2)System Architecture Design Suitable for Automated Driving Vehicle: Hardware Configuration and Software Architecture Design
- 下一篇:旨在实现氢社会
- 上一篇:新能源动力传动系统的开发解决方案



编辑推荐




最新资讯
-
中汽中心工程院能量流测试设备上线全新专家
2025-04-03 08:46
-
上新|AutoHawk Extreme 横空出世-新一代实
2025-04-03 08:42
-
「智能座椅」东风日产N7为何敢称“百万级大
2025-04-03 08:31
-
基于加速度计补偿的俯仰角和路面坡度角估计
2025-04-03 08:30
-
《北京市自动驾驶汽车条例》正式实施 L3级
2025-04-02 20:23
