




 广告
广告





















































电动汽车测试评价应用研究:高精度模型搭建与验证
2021-04-09 19:55:31· 来源:新能源汽车评价规程 CEVE

2020年12月23日,中国汽研成功举办《2020第三届新能源汽车测试评价技术国际论坛》。中国汽研将持续为大家推送精彩演讲实录,本文为英国贝尔法斯特女王大学威廉怀

2020年12月23日,中国汽研成功举办《2020第三届新能源汽车测试评价技术国际论坛》。中国汽研将持续为大家推送精彩演讲实录,本文为英国贝尔法斯特女王大学威廉·怀特技术中心张元建博士带来的《电动汽车测试评价应用研究:高精度模型搭建与验证》。
01 电动汽车测试评价应用
电动汽车测试评价流程可归纳为:首先确立竞品车型,对与之相关的专利、文献以及技术报告进行分析,明确对标车型的技术特点,然后根据对标需求(一般性能测试/策略级别测试/部件级别测试)确立对标方案和对标试验方法,并在此基础上完成相关的对标试验,最后根据所获得的对标结果进行相关分析(如车辆的动力性、经济性、加速性、爬坡性能;车辆的驱动控制策略、制动控制策略、能量管理策略;电池部件特性、上下电策略等)。电动汽车测试评价不仅可以让我们了解竞品车型的基本性能,同时也可以指导产品的开发工作,对于正向开发有非常大的支持作用。
电动汽车测试评价结果应用场景可以归纳为:首先是模型的搭建,根据测试评价结果可以搭建用于这项开发的正向仿真模型,基于正向仿真模型可以完成多项工作(探讨不同选型部件、不同供应商部件、不同参数部件对于车辆性能的影响;设计新的控制策略优化竞品车型或对标车型性能,指导已有车型性能的改进);基于模型,进行能量流仿真分析,电动汽车对于能量的损耗是十分敏感的,通过能量流仿真分析可以明确能量损耗的主要路径,从而进行相应的改进来提升电动汽车能量的使用效率;基于模型,快速开发新的策略,假如开发车型与竞品车型的部件选型相接近,可基于模型快速的开发控制策略来完成所要开发车型的初步设计。可以发现,电动汽车测试评价结果应用场景大多都是基于模型的,那么一个高精度的正向仿真模型将会对正向开发有很大的支持作用,然而受制于测试评价结果以及测试方法的特点,很难直接得到高精度的正向仿真模型。
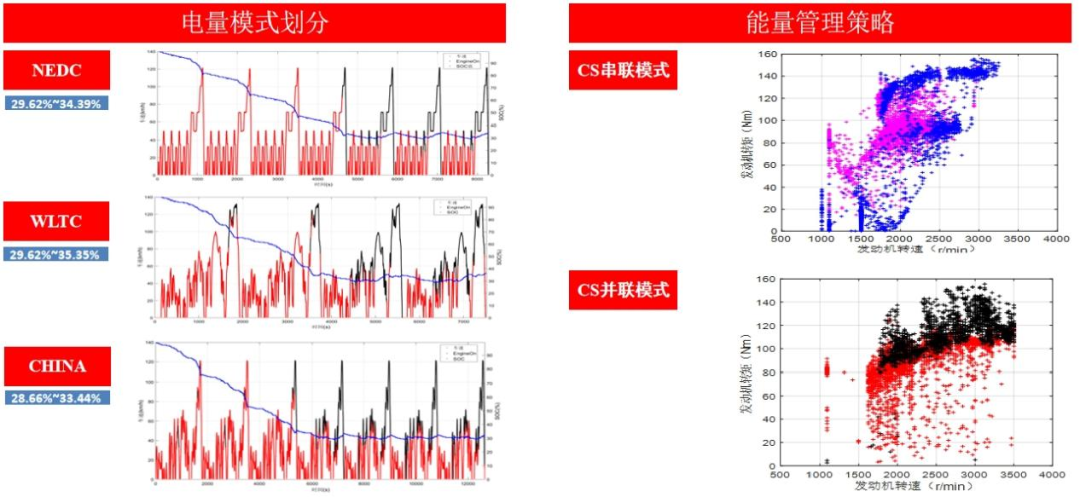
比如为一款PHEV车型搭建正向仿真模型,在设计电量模式划分策略时希望得到一个准确的电量划分边界,具体就是CD-CS切换条件,通常做法就是对电动汽车测试评价标准工况的试验结果进行分析,总结出CD-CS切换边界,但发现当对不同工况或同一工况不同条件下CD-CS切换边界进行分析的时候,很难得到一个具体数值,而有可能只是一个范围,如下图,在NEDC、WLTC、中国工况中得到的CD-CS边界切换条件都是不一致的,可能是受到试验条件、试验环境以及试验操作的影响,这样就不能明确CD-CS切换边界,使得模型搭建的精度受到影响。比如搭建正向仿真模型时,需要设定能量管理策略,希望通过对标分析结果得到竞品车型的能量管理策略,但是因为电动汽车测试只能得到策略结果,很难直接分析导致这种结果的原因,也就是竞品车型能量管理的一些逻辑,如下图只能得到在CD串联模式下电机的充电情况以及发动机工作点的一些分布情况,即使扩大试验规模,做更多的试验,也只能得到更多的工作点的分布,很难直接总结出能量管理策略的具体逻辑。
再比如搭建正向仿真模型时,希望借助电动汽车测试评价结果得到不同模式的切换边界,常用的方法比如根据标准工况试验(加速试验、单次加速试验、等速试验)得到不同模式的工作点,根据这些工作点的边界去勾勒出不同模式的工作区域,借此得到相应的模式切换条件。但是受制于试验规模,得到的边界和工作区域是不完整的,模式切换边界条件也不完整。总之当前电动汽车测试评价就是完成试验,对试验进行分析,得出相应策略的解析结果,但是这种测试流程使得对标车辆能量使用模式边界不清晰,对标车辆模式控制策略具体逻辑模糊,对标车辆能量管理规则不明确,从而影响搭建正向仿真模型的精度,使得在进行策略设计、部件选型、能量流仿真分析中不能很好的应用电动汽车测试评价结果。为了能够改善这种现状,提升搭建正向仿真模型的精度,进一步应用汽车测试评价结果,开发了一种新的高精度模型搭建与验证方法。
02 基于测试评价的高精度模型搭建与验证
模型搭建初期思路与之前基本一致,首先根据对标试验结果一般性分析搭建一个一般意义的模型,比如整车模型搭建、驾驶员模型搭建、控制策略模型搭建。完成模型搭建后,同样会基于测试评价结果构建一个虚拟控制器,使用机器学习方法,利用虚拟控制器去完成所搭建模型的标定以及验证工作,通过这种验证标定的反复相互配合来提升模型精度。
虚拟控制器的构建思路为:竞品车中,控制策略是根据车辆状态、部件状态、驾驶员的输入做出相应决策,并把决策分配给发动机控制器、电机控制器、电池管理系统,然后得到相应的结果。在构建基于机器学习的虚拟控制器时,也采用了类似控制策略输入信号和输出结果,用这些部分数据去训练基于机器学习的虚拟控制器,这样就可以还原竞品车型的控制策略、能量管理策略,可为正向仿真模型去设计相应的模式切换规则、能量管理规则,使得能够参考真实的竞品车型去验证以及重新标定正向仿真模型,从而提升正向仿真模型的精度。
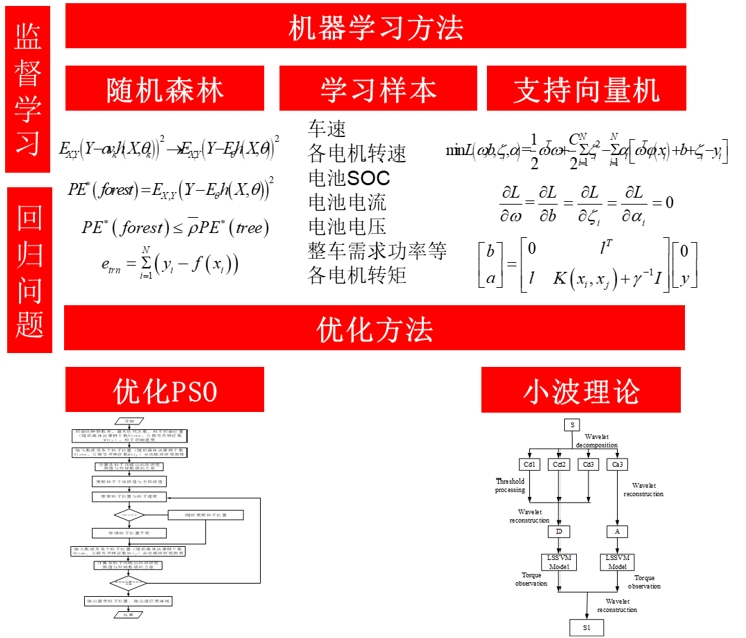
构建虚拟控制器时,首先选择了支持向量机这种机器学习方法,支持向量机对于小样本的学习是非常合适的,基于支持向量机的虚拟控制器的输入是与车辆状态、驾驶员状态以及部件状态相关的信号,为了提升支持向量机的虚拟控制器的识别精度、分析能力,使用随机森林机器学习方法对输入信号进行筛选,筛选出与能量管理控制策略相关的信号,提升了基于机器学习的虚拟控制器的训练效率以及绘图分析能力。为了进一步改善基于支持向量机的虚拟控制器的回归能力,使用优化方法优化支持向量机中的参数,因为在基于机器学习的虚拟控制器的训练时,直接对对标测试所采数据进行选取,并直接应用到了训练中,里面会存在很多噪声,影响基于机器学习算法的训练,使用小波理论,对所获得的测试数据进行滤波,使得数据能够更好的训练基于机器学习的虚拟控制器。
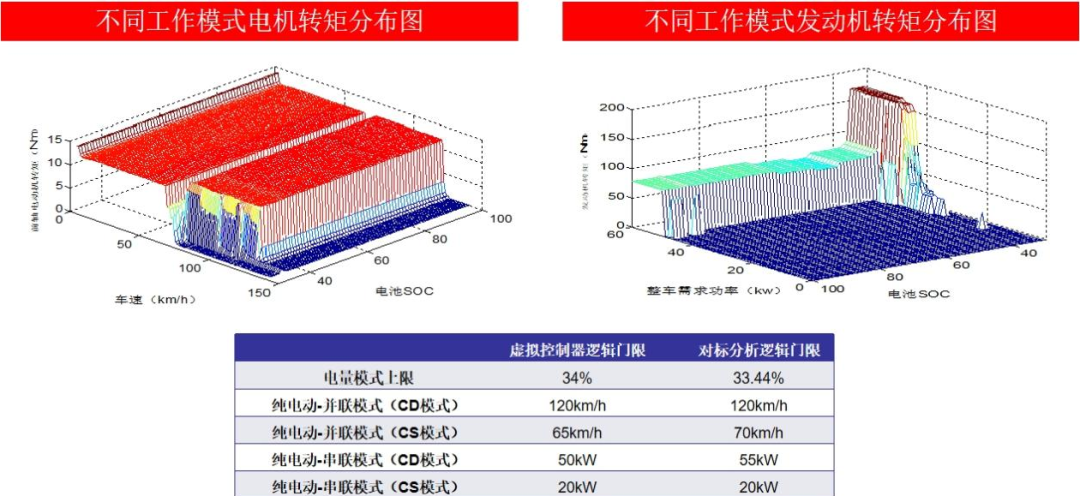
完成了模型搭建以及虚拟控制器的构建之后,可以利用虚拟控制器去生成电机转矩分布图、发动机转矩分布图等,根据生成的转矩分布图就可以去总结驱动的控制策略、模式切换策略(如CD-CS切换条件;在不同模式下能量分配的简单规则);基于转矩分布图,总结出真实的竞品车模式切换条件,CD-CS切换条件,基于此去对比分析基于对标结果的一般性分析所搭建的正向仿真模型中的相关控制策略模块的准确性,如表中虚拟控制器逻辑门限其实就是竞品车的真实表现,那么对标分析逻辑门限就是针对对标分析结果一般性的分析所得到的一些逻辑门限值,通过对比就可以发现之前所搭建模型的精度到底是否达到了竞品车的状态,也可以利用虚拟控制器逻辑门限去重新标定模型,来进一步提升正向仿真模型的精度。
之前提到了支持向量机学习法,同样也利用了其他机器学习法来进行相关的测试,希望寻找到更合适的机器学习方法来构建虚拟控制器。尝试了基于粒子群优化算法的随机森林方法,简单的随机森林方法,基于交叉验证支持向量机方法以及常用的BP随机网络方法,通过对比发现粒子群优化算法的随机森林方法能够取得更好的结果,它也成为了最终构建虚拟控制器的核心机器学习算法。在完成应用我们所构建的虚拟控制器完成模型的搭建验证之后进行了相关测试,将所得到的结果与真实的对标测试结果进行对比,发现通过使用虚拟控制器验证之后所搭建的模型具有非常高的精度。
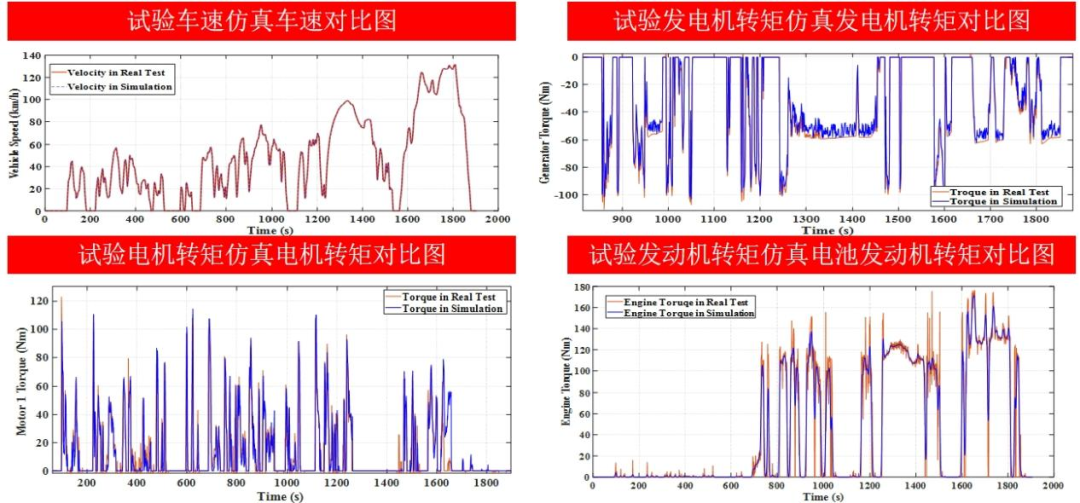
如下图可以看到试验车速和仿真车速基本上是重合的,通过试验得到的发电机转矩、电机转矩和发动机转矩与通过仿真得到的是基本重合的,同样可以看到,特别是在发电机与发动机转矩部分存在一些差异,主要是由于本次搭建的是一个服务于测试开发的准静态模型,一些部件的动态显示特性,如电池、电机的热效应,衰退效应是没有考虑在内的。在未来的研究中,将会开展此类的工作,计划借助深度学习的加入来考虑搭建基于测试评价结果的车辆“机-电-液-热”性能的高精度仿真模型,希望能够进一步为车辆的正向开发服务工作提供支持。



编辑推荐




最新资讯
-
中汽中心工程院能量流测试设备上线全新专家
2025-04-03 08:46
-
上新|AutoHawk Extreme 横空出世-新一代实
2025-04-03 08:42
-
「智能座椅」东风日产N7为何敢称“百万级大
2025-04-03 08:31
-
基于加速度计补偿的俯仰角和路面坡度角估计
2025-04-03 08:30
-
《北京市自动驾驶汽车条例》正式实施 L3级
2025-04-02 20:23
