




 广告
广告





















































NCAP、毫米波雷达及L2+的AEB
2021-04-14 13:22:15· 来源:Astroys

随着消费者对于以前仅存在于高端车型安全功能的需求日益旺盛,全球的新车评价标准(NCAP)也在持续的演进。AEB就是一个非常好的例子。AEB之前仅应用于高端车型,
随着消费者对于以前仅存在于高端车型安全功能的需求日益旺盛,全球的新车评价标准(NCAP)也在持续的演进。AEB就是一个非常好的例子。AEB之前仅应用于高端车型,帮助这些车型获得5星评价。
与此同时,AEB技术本身也在逐步进化,以符合严苛的安全标准和客户预期。随着高精度汽车雷达的不断进步,AEB的目标探测能力逐步改进,来适应复杂的城市工况,城市工况中充满了被阻挡的行人、自行车、宠物等等目标。而以前的AEB仅可以探测到车辆和其他非被阻挡的大目标。
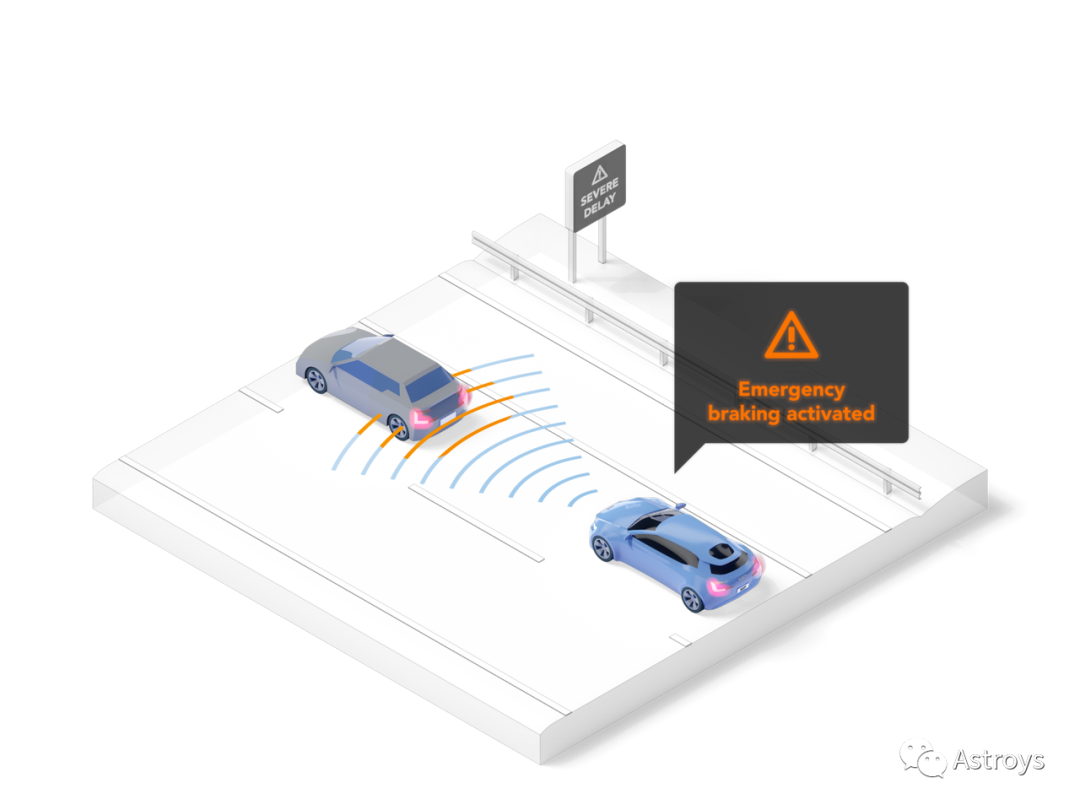
Figure 1. Higher sensitivity in forward-looking radar gives enhanced performance and improves autonomous emergency braking (AEB) with front collision warning (FCW).
今天自动驾驶中许多开发的工作,比如像AEB是聚焦在L1和L2级别的车辆自动化。但许多主机厂对于L3都有所规划,而L2+更是通向更高自动驾驶的进阶。
相比于L2,L2+在安全性和舒适性上有很大的提升,L2+包含了高速巡航等类似的高级的功能,这些功能和用户体验同L3相似,但从形式上来讲L2+还是需要司机负责。理论上讲,L2+的汽车在指定场景,比如高速公路可以完全的主操控,但司机还是不允许完全离开方向盘并必须随时准备接管。
L2+的定义会在主机厂和消费者中大受欢迎,由于全球范围内都在着手修改关于L3的法规,L3比L2+需要更少的司机介入。许多关于L3的争议聚焦在当司机完全推迟了对于车辆的监控后事故责任的归属问题。
更高的集成度,更低的成本结构
同时,性价比是主机厂和Tier-1关注的首要问题。对于雷达支持的功能,比如AEB,在从被动警告向主动的功能过渡,在满足日益增长的安全需求同时,AEB需要有足够吸引人的价格,达到主流商业化的程度。最终,主机厂想要在这个成本导向的生意中提供更好的用户体验和更精准的感知能力。
在第三方供应商方面,RFCMOS技术的持续进步会提供额外的成本优化。向RFCMOS技术的演进需要更小的加工工艺,因此集成度更高,可以生产出更低的收发模块,在降低功耗的同时进一步优化成本。同时对于主机厂而言传感器更小更有利于车辆的布置。
传统的毫米波雷达是基于分离器件构成,有专门的芯片(Rx、Tx、VCO etc.),而RFCMOS工艺将毫米波雷达的收发器完全集成到了一块芯片上。基于RFCMOS收发芯片的量的爬坡最终会加速AEB技术从OEM的中级车型向入门级车型的渗透。
汽车雷达的处理器也就是MCU也在向更精细的工艺演进,可以集成更多的处理能力、专门的信号加速器、更高的安全等级和功能安全层级。这些收发器和处理器工艺的融合促进了更小、更具有能耗比的模块的生产,而这又进一步降低了整体成本。
77GHz毫米波雷达的分辨率优势
NCAP对于安全要求是不指定传感器技术的,毫米波雷达被广泛使用,原因是其具有非常高的测距精度和基于物理学的多普勒测距的全天候性,而这个优势摄像头和激光雷达技术都不具备。如今毫米波雷达可以探测到大截面的物体,比如车辆,而车辆又会进行自动刹车。但行人的截面相对较小,需要雷达有更高的分辨率、灵敏度和更高的MCU和收发器的性能。
24GHz到77GHz的过渡使高精度雷达探测行人和自行车成为了可能。77GHz的毫米波雷达的工作区间在76-81GHz之间,这可以提升了毫米波雷达距离分辨率,同时可以探测到5cm截面的物体。77GHz的引入可能将距离分辨率提高25倍,这就可以在远距离探测出两个不同物体。而这个优势会导致探测和追踪能力的大大提高。
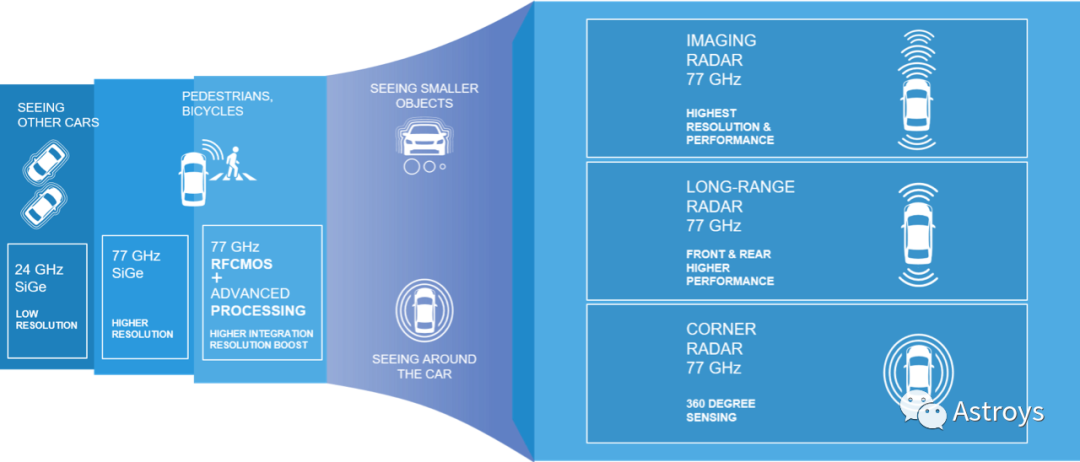
Figure 2. Radar has evolved and now provides greater visibility, from nearby object detection when parking to high-resolution imaging when travelling at highway speeds.
区分不同目标的能力,比如区分车辆和行人对于更高层级的自动驾驶决策意义重大。随着77GHz性能的提升,像AEB这样典型的前向雷达应用可以大大提升,而毫米波雷达探测距离也可以被大大提升。
对于AEB的挑战在人口稠密的市区被进一步复杂化了,在这些地方需要一个更大的FoV。汽车传感器需要在远距离探测出行人和自行车,也包括突然从路边停车或者遮挡物后面窜出的行人。
在可以预见的将来,毫米波雷达还是汽车安全性能的一个优秀的传感器选择,因为毫米波雷达可以提供低价、高可靠性和下一代更安全更智能的汽车需要的性能。虽然机器视觉是大多数物体识别和分类的基础,但毫米波雷达可以补偿视觉的缺失,比如在低光、强光以及不良天气条件下的局限,同时提供高精度、车辆与目标物体之间的深度信息和速度检测能力。
毫米波雷达和其他传感器一样被认可已久,被认为是满足NCAP需要的高性价比选择。其全天候工作的能力也是视觉和激光雷达无法比拟的。
AEB性能的调试
基于单雷达方案的AEB系统会面临一些挑战。有些时候汽车会突然制动,即使前面没有障碍物。这些误触发通常是由于雷达的误判。毫米波由于声学原理十分容易发生误报,但是这也取决于许多因素,尤其是车辆和目标间的距离。
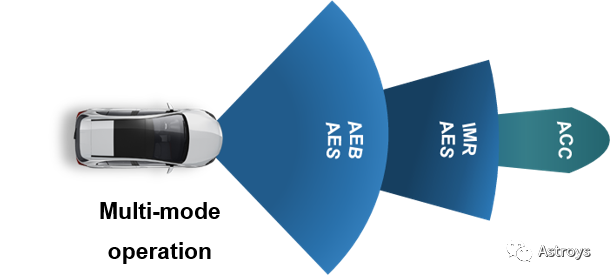
Figure 3. Imaging radar provides multi-mode operation, adapting to speeds, road conditions and driver requirements.
由于雷达处理性能的大幅度提高、智能波束控制以及持续改进的基于RFCMOS收发的多发多收技术的射频性能,这个问题有望解决。很大程度上,这也依赖于处理算法的优化,过滤到误报信息。更快的取样可以帮助减少误报,同时给自动驾驶决策更多的数据。于是,雷达可以判定多帧图像的的一致性从而做出是否制动的决策。毫米波雷达MCU性能的提升可以加速处理速度来支持大规模数据的处理。
未来的趋势及安全的必要性
随着汽车毫米波雷达技术的进步,汽车的传感器也会演化。系统设计者已经探索了使用毫米波雷达来精确构建整车周围环境的模型,提升场景感知。成像雷达的到来会加速这个趋势,通过多个收发器级联大大提升了角分辨率和物体区分能力,成像雷达可以提供更精确的区分场景的能力;同时也增加了测量物体高度的能力,这被证明是雷达对于自动驾驶一个很重要的输入。反过来,这些进步也会使毫米波雷达的搭载大大提升。
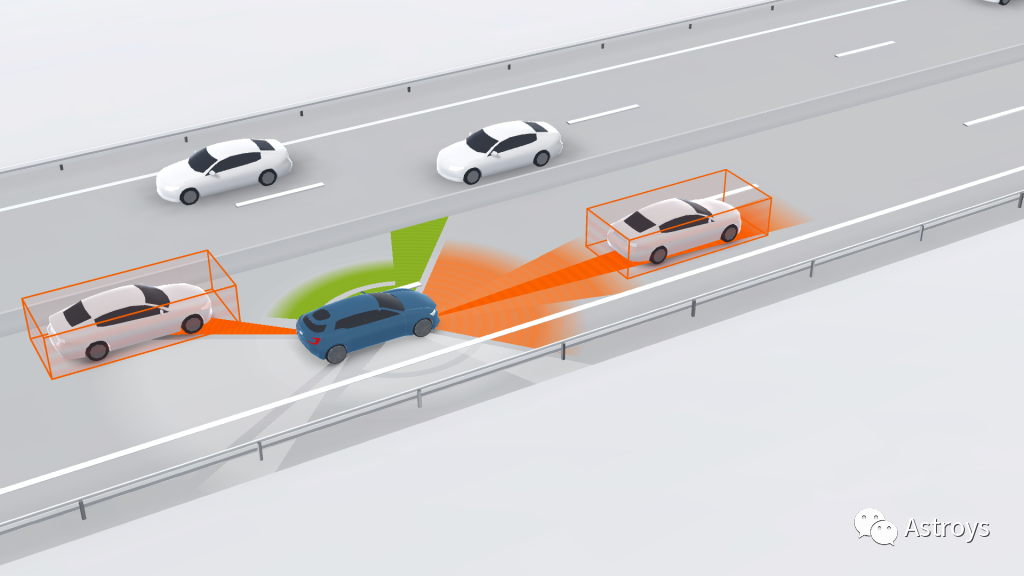
Figure 4. Precise mapping of the entire environment around the vehicle for improved overall scene perception.
为了进一步改善AEB的探测和分辨率,主机厂也在评估使用毫米波雷达和摄像头融合来探测物体。这种方案对于决策而言具有更高的鲁棒性。如果两个传感器对于感知有分歧,决策机制会将误报最小化,从而大大改进感知能力。
在MCU层面,NXP等供应商提供给主机厂一个灵活的研发平台,其中MIPS和存储单元可以配合主机厂的需要。硬件加速器、单功耗性能和代码可移植性都是处理器层面关键因素。
持续在收发器端的功能整合非常关键。理想的模块是可以将信号发生、放大、接收、混合、调制和数字化集成在一块芯片上。这可以将用户主流商用车队的基于雷达的安全系统开发大大简化,同时为标配铺平道路。
从一个供应商采购收发器和MCU好处多多,可以有现成的经验和对于器件集成的深刻理解。最重要的是,主机厂和Tier 1需要绝对确认从第三方购买的器件是从头至尾符合车规的。这就需要有强大的基于整个流程的方法同时满足下一代信息安全的要求。
[参考文章]
NCAP, Radar & Autonomous Emergency Braking for L2+ — Karthik Ramesh, NXP
与此同时,AEB技术本身也在逐步进化,以符合严苛的安全标准和客户预期。随着高精度汽车雷达的不断进步,AEB的目标探测能力逐步改进,来适应复杂的城市工况,城市工况中充满了被阻挡的行人、自行车、宠物等等目标。而以前的AEB仅可以探测到车辆和其他非被阻挡的大目标。
Figure 1. Higher sensitivity in forward-looking radar gives enhanced performance and improves autonomous emergency braking (AEB) with front collision warning (FCW).
今天自动驾驶中许多开发的工作,比如像AEB是聚焦在L1和L2级别的车辆自动化。但许多主机厂对于L3都有所规划,而L2+更是通向更高自动驾驶的进阶。
相比于L2,L2+在安全性和舒适性上有很大的提升,L2+包含了高速巡航等类似的高级的功能,这些功能和用户体验同L3相似,但从形式上来讲L2+还是需要司机负责。理论上讲,L2+的汽车在指定场景,比如高速公路可以完全的主操控,但司机还是不允许完全离开方向盘并必须随时准备接管。
L2+的定义会在主机厂和消费者中大受欢迎,由于全球范围内都在着手修改关于L3的法规,L3比L2+需要更少的司机介入。许多关于L3的争议聚焦在当司机完全推迟了对于车辆的监控后事故责任的归属问题。
更高的集成度,更低的成本结构
同时,性价比是主机厂和Tier-1关注的首要问题。对于雷达支持的功能,比如AEB,在从被动警告向主动的功能过渡,在满足日益增长的安全需求同时,AEB需要有足够吸引人的价格,达到主流商业化的程度。最终,主机厂想要在这个成本导向的生意中提供更好的用户体验和更精准的感知能力。
在第三方供应商方面,RFCMOS技术的持续进步会提供额外的成本优化。向RFCMOS技术的演进需要更小的加工工艺,因此集成度更高,可以生产出更低的收发模块,在降低功耗的同时进一步优化成本。同时对于主机厂而言传感器更小更有利于车辆的布置。
传统的毫米波雷达是基于分离器件构成,有专门的芯片(Rx、Tx、VCO etc.),而RFCMOS工艺将毫米波雷达的收发器完全集成到了一块芯片上。基于RFCMOS收发芯片的量的爬坡最终会加速AEB技术从OEM的中级车型向入门级车型的渗透。
汽车雷达的处理器也就是MCU也在向更精细的工艺演进,可以集成更多的处理能力、专门的信号加速器、更高的安全等级和功能安全层级。这些收发器和处理器工艺的融合促进了更小、更具有能耗比的模块的生产,而这又进一步降低了整体成本。
77GHz毫米波雷达的分辨率优势
NCAP对于安全要求是不指定传感器技术的,毫米波雷达被广泛使用,原因是其具有非常高的测距精度和基于物理学的多普勒测距的全天候性,而这个优势摄像头和激光雷达技术都不具备。如今毫米波雷达可以探测到大截面的物体,比如车辆,而车辆又会进行自动刹车。但行人的截面相对较小,需要雷达有更高的分辨率、灵敏度和更高的MCU和收发器的性能。
24GHz到77GHz的过渡使高精度雷达探测行人和自行车成为了可能。77GHz的毫米波雷达的工作区间在76-81GHz之间,这可以提升了毫米波雷达距离分辨率,同时可以探测到5cm截面的物体。77GHz的引入可能将距离分辨率提高25倍,这就可以在远距离探测出两个不同物体。而这个优势会导致探测和追踪能力的大大提高。
Figure 2. Radar has evolved and now provides greater visibility, from nearby object detection when parking to high-resolution imaging when travelling at highway speeds.
区分不同目标的能力,比如区分车辆和行人对于更高层级的自动驾驶决策意义重大。随着77GHz性能的提升,像AEB这样典型的前向雷达应用可以大大提升,而毫米波雷达探测距离也可以被大大提升。
对于AEB的挑战在人口稠密的市区被进一步复杂化了,在这些地方需要一个更大的FoV。汽车传感器需要在远距离探测出行人和自行车,也包括突然从路边停车或者遮挡物后面窜出的行人。
在可以预见的将来,毫米波雷达还是汽车安全性能的一个优秀的传感器选择,因为毫米波雷达可以提供低价、高可靠性和下一代更安全更智能的汽车需要的性能。虽然机器视觉是大多数物体识别和分类的基础,但毫米波雷达可以补偿视觉的缺失,比如在低光、强光以及不良天气条件下的局限,同时提供高精度、车辆与目标物体之间的深度信息和速度检测能力。
毫米波雷达和其他传感器一样被认可已久,被认为是满足NCAP需要的高性价比选择。其全天候工作的能力也是视觉和激光雷达无法比拟的。
AEB性能的调试
基于单雷达方案的AEB系统会面临一些挑战。有些时候汽车会突然制动,即使前面没有障碍物。这些误触发通常是由于雷达的误判。毫米波由于声学原理十分容易发生误报,但是这也取决于许多因素,尤其是车辆和目标间的距离。
Figure 3. Imaging radar provides multi-mode operation, adapting to speeds, road conditions and driver requirements.
由于雷达处理性能的大幅度提高、智能波束控制以及持续改进的基于RFCMOS收发的多发多收技术的射频性能,这个问题有望解决。很大程度上,这也依赖于处理算法的优化,过滤到误报信息。更快的取样可以帮助减少误报,同时给自动驾驶决策更多的数据。于是,雷达可以判定多帧图像的的一致性从而做出是否制动的决策。毫米波雷达MCU性能的提升可以加速处理速度来支持大规模数据的处理。
未来的趋势及安全的必要性
随着汽车毫米波雷达技术的进步,汽车的传感器也会演化。系统设计者已经探索了使用毫米波雷达来精确构建整车周围环境的模型,提升场景感知。成像雷达的到来会加速这个趋势,通过多个收发器级联大大提升了角分辨率和物体区分能力,成像雷达可以提供更精确的区分场景的能力;同时也增加了测量物体高度的能力,这被证明是雷达对于自动驾驶一个很重要的输入。反过来,这些进步也会使毫米波雷达的搭载大大提升。
Figure 4. Precise mapping of the entire environment around the vehicle for improved overall scene perception.
为了进一步改善AEB的探测和分辨率,主机厂也在评估使用毫米波雷达和摄像头融合来探测物体。这种方案对于决策而言具有更高的鲁棒性。如果两个传感器对于感知有分歧,决策机制会将误报最小化,从而大大改进感知能力。
在MCU层面,NXP等供应商提供给主机厂一个灵活的研发平台,其中MIPS和存储单元可以配合主机厂的需要。硬件加速器、单功耗性能和代码可移植性都是处理器层面关键因素。
持续在收发器端的功能整合非常关键。理想的模块是可以将信号发生、放大、接收、混合、调制和数字化集成在一块芯片上。这可以将用户主流商用车队的基于雷达的安全系统开发大大简化,同时为标配铺平道路。
从一个供应商采购收发器和MCU好处多多,可以有现成的经验和对于器件集成的深刻理解。最重要的是,主机厂和Tier 1需要绝对确认从第三方购买的器件是从头至尾符合车规的。这就需要有强大的基于整个流程的方法同时满足下一代信息安全的要求。
[参考文章]
NCAP, Radar & Autonomous Emergency Braking for L2+ — Karthik Ramesh, NXP



编辑推荐




最新资讯
-
大卓智能端到端直播实测,16公里复杂路段挑
2025-04-25 17:16
-
《汽车轮胎耐撞击性能试验方法-车辆法》等
2025-04-25 11:45
-
“真实”而精确的能量流测试:电动汽车能效
2025-04-25 11:44
-
GRAS助力中国高校科研升级
2025-04-25 10:25
-
梅赛德斯-AMG使用VI-CarRealTime开发其控制
2025-04-25 10:21
