




 广告
广告





















































搭载激光雷达的小鹏P5如何实现自动驾驶的全场景闭环?
2021-04-21 23:19:02· 来源:自动驾驶干货铺 作者:陈光ShawnChen

小鹏P5配合XPilot 3.5带来的城区NGP(自主导航辅助驾驶)功能,绝对是今年以来最能引爆自动驾驶圈的消息了。搭载激光雷达的小鹏P5和XPilot 3.5自动驾驶辅助系统
小鹏P5配合XPilot 3.5带来的城区NGP(自主导航辅助驾驶)功能,绝对是今年以来最能引爆自动驾驶圈的消息了。
搭载激光雷达的小鹏P5和XPilot 3.5自动驾驶辅助系统的发布,使小鹏汽车成为国内首批做到城区、高速、停车场自动驾驶全场景闭环的企业。小鹏P5所具备的自动驾驶能力,理论上可以让车主的日常出行变成全自动驾驶。
那么小鹏P5究竟凭借什么完成了自动驾驶领域中,难度最高的城区自动驾驶功能?让我们一探究竟。
小鹏P5自动驾驶硬实力——豪华传感器配置
所谓硬实力就是小鹏P5自动驾驶系统中看得见摸得到的东西——传感器。
小鹏P5的自动驾驶传感器配置完全可以用豪华二字来形容。它搭载了2个激光雷达、13个摄像头、5个毫米波雷达、12个超声波传感器、GNSS和IMU共计32个传感器+1套高精定位单元。分布在各个方向的传感器使P5具备了360°的环境感知能力。

小鹏P5传感器配置图示意图
在这32个传感器中,最受瞩目的当属激光雷达。作为实现城区自动驾驶功能最为重要的传感器,单个激光雷达的FOV(Filed Of View,视场)可达120°,最远探测距离可达150米,左右两侧的配置方式可以更加精确地完成前向和前侧向交通参与者的感知。
有些知友可能已经注意到了小鹏P5的激光安装位置和蔚来ET7、智己L7有所不同。蔚来ET7和智己L7采用的都是车顶安装前向单激光的方案,小鹏P5采用的是左右两侧激光的安装方式。这两种方式本质上并无孰优孰劣之分,各有千秋。
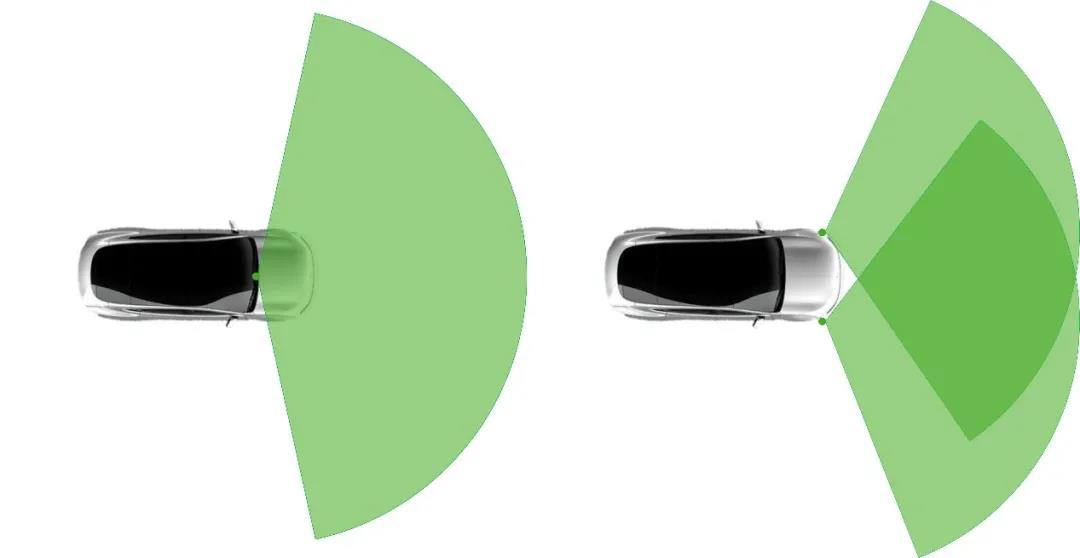
两种激光雷达安装方案图示意
顶激光的布置方式可以让探测范围更高、更远。相比较而言,我更看好P5的布置方式。因为对于城区自动驾驶来说自动驾驶汽车左右两侧的盲区是很关键的区域,安装在车头左右两侧能更早地探测到左右两侧的关键目标,盲区更小。此外相对于布置在太阳可以直射的位置,P5的安装位置对于激光雷达的工作温度及散热方式均有较好的考量,激光雷达工作在合适的温度下,其使用寿命也会有所延长。
当前很多车厂会选择使用博世等Tier1厂商提供的现成方案来实现自动驾驶功能。虽然这些方案能够很快地使汽车具备特定场景下的自动驾驶能力,但出厂后,它的功能就基本定型了,很少有Tier1会维护后期的升级。用手机来类比,依赖Tier1开发的自动驾驶系统,有点像非智能手机,出厂具备哪些功能,就只能拥有哪些功能。
小鹏放弃了“快餐式”的自动驾驶系统,选择构建自己的软实力。
小鹏P5自动驾驶软实力——全栈自研系统
全栈自研促进自动驾驶高速迭代
小鹏P5所具备的软实力对实现城区自动驾驶起到了关键作用,这里的软实力就是小鹏全栈自研的自动驾驶技术路线。
小鹏的XPilot从第一代开始就选择了上限更高的全栈自研路线。作为全球唯二的全栈自研系统,这套系统让小鹏投入巨大,虽然短期内很难看到显著的效果,但令人欣慰的是,小鹏最终坚持走了下来,用不错的成绩向友商们证明了全栈自研系统的可行性。
自动驾驶是一个需要不断迭代,不断完善的系统,全栈自研的系统能够保证自动驾驶数据的闭环,用数据来驱动算法的迭代,时间越长,积累的数据越多,算法能力也越强,实现良性循环。
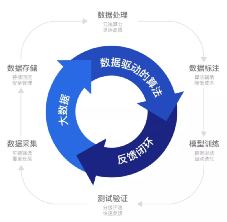
数据驱动自动驾驶算法迭代
小鹏是一个善于将自动驾驶功能打磨到极致的企业,通过长期的数据积累和算法迭代,小鹏XPilot的高速/环路辅助驾驶功能和自动泊车功能都成为了业内的标杆和各大友商竞相对标的对象。
2021年3月小鹏组织了一次以P7车型为基础的3000KM NGP远征活动,根据3000KM实际路测的统计结果,小鹏P7的变道超车成功率94.41%,出/入高速匝道成功率92.76%,隧道通过成功率94.95%,平均每百公里接管0.71次,这就意味着小鹏的P7的NGP功能在高速/环路上每行驶140KM只需要接管一次,这在行业内都是很亮眼的表现。
泊车方面,随着XPilot 3.5的发布,小鹏P5将具备停车场记忆泊车功能。在多雷达(激光雷达、毫米波雷达、超声波雷达)和摄像头的加持下,XPilot 3.5可以自如应对停车场中出入库的车辆、对向来车、行人穿梭、连续直角弯等复杂场景。如下所示为XPilot 3.5的停车场记忆泊车功能。
小鹏P5如何突破城区自动驾驶难点?
相比于高速/环路和停车场的场景,城市道路的路况更为复杂。
自动驾驶汽车将遇到随意横穿的行人、骑行人,静态障碍物(水马、锥桶、垃圾桶、临时栅栏等)、路面小物体(三角警示牌、石块等),异型车(拉货三轮车、工程车)等。除了各种奇怪的障碍物外,城区场景下还经常出现弱光、逆光、明暗交替(隧道)的场景。

以视觉+毫米波雷达为主传感器方案的自动驾驶方案,在这些复杂场景下有极大的安全隐患。为了能够实现城区自动驾驶功能,达到全场景自动驾驶闭环,小鹏在P5上配备了激光雷达。
激光雷达+视觉+毫米波雷达的多传感器冗余方案,使得城区路况的环境感知能力和安全性均得到了极大提升。除了原本视觉+毫米波雷达融合检出目标的方式外,还可以进一步实现激光雷达+视觉、激光雷达+毫米波雷达这种检出目标的方式,多冗余检出的方式能够避免很多漏检,提升驾驶安全性。

城区NGP功能的发布将使小鹏P5拥有红绿灯路口通行能力(红绿灯识别、直行、右转及无保护的左转),城市路况超车能力、定制化跟车能力、自动限速调节能力(可根据地面/道路路况进行动态调节)和环岛通行能力,这些都是城区路况下的典型场景。
小鹏P5更有趣的V2X
除了城区NGP功能外,小鹏P5还有另外一个点让我印象深刻,那就是V2X。
V2X是Vehicle To Everything的简称,它能让车辆、基础道路设施、行人等通过各自的通讯设备共享当前状态、位置以及行动意图等信息,使重要警示信息能够被准时推送到所有连接到网络的设备中。最开始,我以为P5的V2X只是用来服务自动驾驶的,后来才发现远不止如此。小鹏P5在服务自动驾驶的基础之上做了更多有趣的拓展,它将V2X中的X变成了我们日常出行、生活中的物件。
第一个是Vehicle To Phone,小鹏P5配备了独特的蓝牙手机钥匙功能,最远的识别距离可达30米,实现近车自动解锁并启动车辆,离车自动闭锁,无感解闭锁。
第二个是Vehicle To Smart-Roof,小鹏P5在车顶深色区域覆盖了一层高性能太阳能膜,可同时实现露天停车情况下车内智能通风换气和蓄电池充电,通过手机可以实时查看智能车顶的工作状态。
第三个是Vehicle To XiaoMi,这应该是国内首批将智能车载网络与小米居家设备进行互联的功能,可以在车上完成很多手机上才能够实现的家具交互功能。
结语
从一个自动驾驶工程师的视角来看,小鹏P5和XPilot 3.5的发布,使得量产车的城区自动驾驶成为可能,这将是中国自动驾驶领域的又一里程碑。随着P5的发布,我相信国内会有越来越多的车企意识到激光雷达的重要性,越来越多的车企也将选择激光雷达来提升自动驾驶功能的能力和安全性,完成城区自动驾驶这最后一块拼图。
搭载激光雷达的小鹏P5和XPilot 3.5自动驾驶辅助系统的发布,使小鹏汽车成为国内首批做到城区、高速、停车场自动驾驶全场景闭环的企业。小鹏P5所具备的自动驾驶能力,理论上可以让车主的日常出行变成全自动驾驶。
那么小鹏P5究竟凭借什么完成了自动驾驶领域中,难度最高的城区自动驾驶功能?让我们一探究竟。
小鹏P5自动驾驶硬实力——豪华传感器配置
所谓硬实力就是小鹏P5自动驾驶系统中看得见摸得到的东西——传感器。
小鹏P5的自动驾驶传感器配置完全可以用豪华二字来形容。它搭载了2个激光雷达、13个摄像头、5个毫米波雷达、12个超声波传感器、GNSS和IMU共计32个传感器+1套高精定位单元。分布在各个方向的传感器使P5具备了360°的环境感知能力。
小鹏P5传感器配置图示意图
在这32个传感器中,最受瞩目的当属激光雷达。作为实现城区自动驾驶功能最为重要的传感器,单个激光雷达的FOV(Filed Of View,视场)可达120°,最远探测距离可达150米,左右两侧的配置方式可以更加精确地完成前向和前侧向交通参与者的感知。
有些知友可能已经注意到了小鹏P5的激光安装位置和蔚来ET7、智己L7有所不同。蔚来ET7和智己L7采用的都是车顶安装前向单激光的方案,小鹏P5采用的是左右两侧激光的安装方式。这两种方式本质上并无孰优孰劣之分,各有千秋。
两种激光雷达安装方案图示意
顶激光的布置方式可以让探测范围更高、更远。相比较而言,我更看好P5的布置方式。因为对于城区自动驾驶来说自动驾驶汽车左右两侧的盲区是很关键的区域,安装在车头左右两侧能更早地探测到左右两侧的关键目标,盲区更小。此外相对于布置在太阳可以直射的位置,P5的安装位置对于激光雷达的工作温度及散热方式均有较好的考量,激光雷达工作在合适的温度下,其使用寿命也会有所延长。
当前很多车厂会选择使用博世等Tier1厂商提供的现成方案来实现自动驾驶功能。虽然这些方案能够很快地使汽车具备特定场景下的自动驾驶能力,但出厂后,它的功能就基本定型了,很少有Tier1会维护后期的升级。用手机来类比,依赖Tier1开发的自动驾驶系统,有点像非智能手机,出厂具备哪些功能,就只能拥有哪些功能。
小鹏放弃了“快餐式”的自动驾驶系统,选择构建自己的软实力。
小鹏P5自动驾驶软实力——全栈自研系统
全栈自研促进自动驾驶高速迭代
小鹏P5所具备的软实力对实现城区自动驾驶起到了关键作用,这里的软实力就是小鹏全栈自研的自动驾驶技术路线。
小鹏的XPilot从第一代开始就选择了上限更高的全栈自研路线。作为全球唯二的全栈自研系统,这套系统让小鹏投入巨大,虽然短期内很难看到显著的效果,但令人欣慰的是,小鹏最终坚持走了下来,用不错的成绩向友商们证明了全栈自研系统的可行性。
自动驾驶是一个需要不断迭代,不断完善的系统,全栈自研的系统能够保证自动驾驶数据的闭环,用数据来驱动算法的迭代,时间越长,积累的数据越多,算法能力也越强,实现良性循环。
数据驱动自动驾驶算法迭代
小鹏是一个善于将自动驾驶功能打磨到极致的企业,通过长期的数据积累和算法迭代,小鹏XPilot的高速/环路辅助驾驶功能和自动泊车功能都成为了业内的标杆和各大友商竞相对标的对象。
2021年3月小鹏组织了一次以P7车型为基础的3000KM NGP远征活动,根据3000KM实际路测的统计结果,小鹏P7的变道超车成功率94.41%,出/入高速匝道成功率92.76%,隧道通过成功率94.95%,平均每百公里接管0.71次,这就意味着小鹏的P7的NGP功能在高速/环路上每行驶140KM只需要接管一次,这在行业内都是很亮眼的表现。
泊车方面,随着XPilot 3.5的发布,小鹏P5将具备停车场记忆泊车功能。在多雷达(激光雷达、毫米波雷达、超声波雷达)和摄像头的加持下,XPilot 3.5可以自如应对停车场中出入库的车辆、对向来车、行人穿梭、连续直角弯等复杂场景。如下所示为XPilot 3.5的停车场记忆泊车功能。
小鹏P5如何突破城区自动驾驶难点?
相比于高速/环路和停车场的场景,城市道路的路况更为复杂。
自动驾驶汽车将遇到随意横穿的行人、骑行人,静态障碍物(水马、锥桶、垃圾桶、临时栅栏等)、路面小物体(三角警示牌、石块等),异型车(拉货三轮车、工程车)等。除了各种奇怪的障碍物外,城区场景下还经常出现弱光、逆光、明暗交替(隧道)的场景。
以视觉+毫米波雷达为主传感器方案的自动驾驶方案,在这些复杂场景下有极大的安全隐患。为了能够实现城区自动驾驶功能,达到全场景自动驾驶闭环,小鹏在P5上配备了激光雷达。
激光雷达+视觉+毫米波雷达的多传感器冗余方案,使得城区路况的环境感知能力和安全性均得到了极大提升。除了原本视觉+毫米波雷达融合检出目标的方式外,还可以进一步实现激光雷达+视觉、激光雷达+毫米波雷达这种检出目标的方式,多冗余检出的方式能够避免很多漏检,提升驾驶安全性。
城区NGP功能的发布将使小鹏P5拥有红绿灯路口通行能力(红绿灯识别、直行、右转及无保护的左转),城市路况超车能力、定制化跟车能力、自动限速调节能力(可根据地面/道路路况进行动态调节)和环岛通行能力,这些都是城区路况下的典型场景。
小鹏P5更有趣的V2X
除了城区NGP功能外,小鹏P5还有另外一个点让我印象深刻,那就是V2X。
V2X是Vehicle To Everything的简称,它能让车辆、基础道路设施、行人等通过各自的通讯设备共享当前状态、位置以及行动意图等信息,使重要警示信息能够被准时推送到所有连接到网络的设备中。最开始,我以为P5的V2X只是用来服务自动驾驶的,后来才发现远不止如此。小鹏P5在服务自动驾驶的基础之上做了更多有趣的拓展,它将V2X中的X变成了我们日常出行、生活中的物件。
第一个是Vehicle To Phone,小鹏P5配备了独特的蓝牙手机钥匙功能,最远的识别距离可达30米,实现近车自动解锁并启动车辆,离车自动闭锁,无感解闭锁。
第二个是Vehicle To Smart-Roof,小鹏P5在车顶深色区域覆盖了一层高性能太阳能膜,可同时实现露天停车情况下车内智能通风换气和蓄电池充电,通过手机可以实时查看智能车顶的工作状态。
第三个是Vehicle To XiaoMi,这应该是国内首批将智能车载网络与小米居家设备进行互联的功能,可以在车上完成很多手机上才能够实现的家具交互功能。
结语
从一个自动驾驶工程师的视角来看,小鹏P5和XPilot 3.5的发布,使得量产车的城区自动驾驶成为可能,这将是中国自动驾驶领域的又一里程碑。随着P5的发布,我相信国内会有越来越多的车企意识到激光雷达的重要性,越来越多的车企也将选择激光雷达来提升自动驾驶功能的能力和安全性,完成城区自动驾驶这最后一块拼图。



编辑推荐




最新资讯
-
大卓智能端到端直播实测,16公里复杂路段挑
2025-04-25 17:16
-
《汽车轮胎耐撞击性能试验方法-车辆法》等
2025-04-25 11:45
-
“真实”而精确的能量流测试:电动汽车能效
2025-04-25 11:44
-
GRAS助力中国高校科研升级
2025-04-25 10:25
-
梅赛德斯-AMG使用VI-CarRealTime开发其控制
2025-04-25 10:21
