




 广告
广告





















































汽车电子电气架构发展演进
2021-05-21 20:02:38· 来源:旺材汽车电子

来源:邵宁华 张庆余 王增喜 贾通;中汽数据(天津)有限公司1. 概述电子技术在汽车系统上的应用是保证车辆新功能的硬件基础。电子电气设备的应用为今天的汽车提
来源:邵宁华 张庆余 王增喜 贾通;中汽数据(天津)有限公司
1. 概述
电子技术在汽车系统上的应用是保证车辆新功能的硬件基础。电子电气设备的应用为今天的汽车提供了更高的性能,更舒适的驾驶体验,更高的安全水平及更低的尾气排放。随着计算机和网络技术的飞速发展,汽车工业开始了智能网联化发展,这要求汽车电子电气由提供非重要功能演变到辅助驾驶,从感知和驱动等系统执行器件演变为高性能、高负荷的处理模块。
这表明电子电气在汽车系统中扮演着越来越重要的角色,开始处理越来越复杂的功能性问题。将各类传感器、线束、控制器、各个系统和软硬件有机的结合起来,构成集成化、功能化、智能化的电子电气系统已经成为必然趋势。随着汽车智能化的发展,汽车上车载电子元器件和电子控制单元的数量增加,汽车功能的越来越多、车载设备间通讯网络越来越复杂,对车载设备的性能要求越来越高。为了适应智能网联汽车的发展,对电子电气架构的发展也提出了新的要求。
2. 电子电气架构发展
汽车电子电气系统架构的发展,由20世纪80年代最初的分布式架构逐渐发展为当前的高度智能和融合化(如图1所示)。
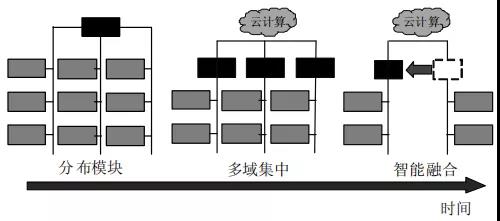
图1 汽车电子电气架构演变示意
发展初期,不同的电子控制单元(ECU)通过等效网络接口通过通信链路连接,实现有效通信。而随着技术的发展,不同电子控制单元(ECU)合并以及硬件系统的集成化设计,使得汽车电子电气架构逐渐过渡到模块化和集成化,促进了不同电子控制单元(ECU)之间的相互通信和融合,这种变化趋势随着车辆智能网联化的需要会得到进一步的发展。而且,大数据和互联网技术的愈发成熟,使得人-车-环境多维度融合交互通信称为可能,使用大数据云处理器控制车辆也逐渐成为可能。
车辆智能网联化发展,带来车辆自身个体复杂程度的增加、车辆各系统之间的交互通信增加、车辆之间的互联通信增加。这对于电子电气的通信能力及架构的延展性提出更高的要求。车载电子电气架构的设计和搭建需要考虑的因素就更多。例如实时性需求、诊断服务请求等以整车功能导向为目标的要求。下面就当前市场应用及研究发展中的车载电子电气架构做详细介绍。
当前,汽车市场在用的车载电子电气架构主要以多域控制器为主,目前,国外主流主机厂一般采用主要采用以多域控制器及中央集中+区域控制器相结合的电子电气架构,将车辆分为不同的子模块即不同的域,比如动力总成域、底盘域、车身域、娱乐媒体域等。
不同的域对域内的电子控制单元(ECU)进行整合,域内的ECU通过共享总线系统进行通信。中央网管用于连接不同的域,实现不同域之间的信息交互和数据通信。其中,特斯拉 Model 3 的电子电气架构由 CCM(即自动驾驶及娱乐域控制模块融合)、前车身控制器、右车身控制器、左车身控制器所构成(如图2所示)。
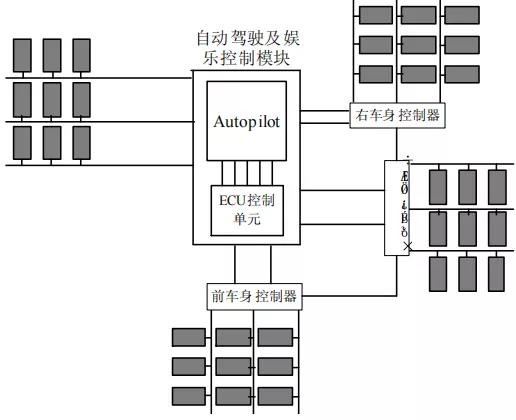
图2 特斯拉 Model 3 的电子电气架构组成
按照车辆的位置对车辆系统控制进行了区域划分,这样的控制器布置简化了线束,提高了系统效率。CCM 模块主要作为整车的决策中心,负责处理所有辅助驾驶相关的传感器。同时,对主要核心控制器进行数据处理、决策仲裁。各控制器之间通过共享总线系统进行通信,及时将监测到的车辆信息反馈给 CCM,保证与各控制器及 CCM 模块之间的实时通信。
另外,丰田公司提出了采用中央集中 + 区域控制器相结合的电子电气架构方案。这种方案为每个域集成高性能控制器,即域控制器,提供域内的通信和域外的连接。这种结构由于大部分数据交换发生在域内,减少了 ECU 内部来自中央网关的通信。有助于 ECU 在硬件系统上的集成化,有效降低了控制器成本。通过使用基于 Adaptive AUTOSAR 和 Classic AUTOSAR 的混合架构,实现便捷的固件升级以及功能的可拓展性。同时,该架构在硬件、线束布置上,减少了线束的长度、降低了线束的设计复杂程度,轻量化设计、降低重量。与此同时,在设备安装上,中央集中式电子电气架构逐步减少了控制器、ECU 的数量和线束长度,为后续固件升级预留更多的空间。
为了解决智能网联汽车在系统、软件升级对汽车内部通信速率、计算能力以及电子电气架构的可延展性要求,主流互联网公司和车企设计开发满足智能网联汽车通信需求的新架构[5]。其中,华为提出了一款 C-C 概念架构(如图 3 所示),
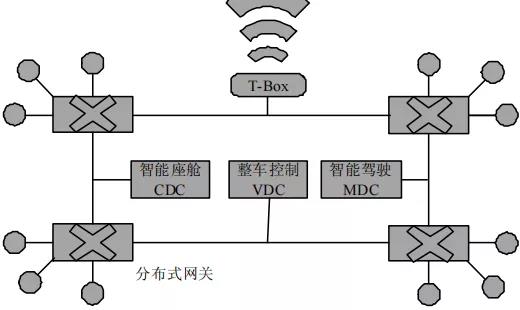
图3 华为 C-C 架构模型
即“分布式网络 + 域控制器的架构”,该架构主要是将汽车分为智能座舱域、整车控制域以及智能驾驶域三部分。通过华为计划未来通过域控制器和操作系统打造的 CC 架构可以做到软件在线升级、硬件在线更换升级以及传感器的可拓展性,以达到软件定义汽车的目标。
联合汽车电子公司为智能网联汽车设计开发了扩展型域控制器(如图 4 所示)。
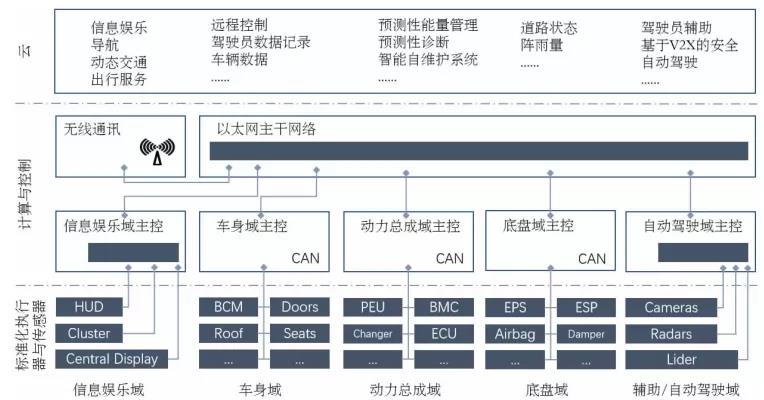
图4 拓展型控制器架构示意图
根据未来智能网联汽车的功能需求,拓展型域控制器架构分为云 - 管 - 端一体化设计,顶层为云端服务平台,中间层为计算与控制层,底层为标准化执行器与传感器层。该架构将标准化执行与传感器层分为信息娱乐域、车身域、动力总成域、底盘域、辅助 / 自动驾驶域。在这种架构中,根据智能网联车辆行驶过程中的数据需求,通过底层传感器层进行数据收集,在中间层进行数据处理与分析,最终反馈到云端。云端服务器根据需要处理的信息,为不同车辆设备提供灵活性的集群处理,符合未来智能网联汽车的功能需求。
3. 电子电气架构未来发展的机遇和挑战
未来,自动驾驶要求更高的算力和更多传感器件,汽车内部的快速电子化让电子架构不堪重负,对于未来汽车电子架构来说,更应该做减法了。当然,互联网技术(5G+)愈发成熟,将大大加快电子电气架构在当前基础上的进一步深度演进。倘若通信网络带宽足够的宽,通信延迟足够的低,这一趋势将会更加明显。此外,计算机技术的高速发展促进控制器计算能力向中央集中,向云端集中演变;汽车电子电气架构的演进也朝着集成式,甚至服务器式这一方向前行。目前,车载服务器已经被开发,其高性能计算机可用于预定义功能的应用软件和第三方软件及服务平台,凭此可实现新的移动概念,可增强终端用户体验。这对于汽车电子电气架构而言,都是未来发展的驱动力量和发展机遇。但是,不可否认,车辆智能网联化发展对汽车电子电气架构带来了更高的要求,更大的挑战。其中主要包括以下几个方面:
3.1 功能安全
功能安全是指避免由系统功能故障导致的不可接受的风险,重点关注系统故障之后的行为因素。致力于找出找出所有可能的系统失效原因,并针对这些失效制定出相应的安全机制,采取相应的安全措施。电子电气架构面临的功能安全挑战主要体现在感知冗余和自动驾驶控制冗余。车辆的电子电气架构从最初的单激光雷达单摄像头架构,到后来多激光雷达多摄像头架构及复合摄像头架构,这些架构中的不同的种类的摄像头、激光雷达都需要进行安全冗余设计。以防止在传感器出现故障后,系统依靠冗余备份的传感器进行工作,以保证车辆的正常行驶。自动驾驶系统中,自动驾驶域控制器主要是负责决策、路径规划控制。为了避免由于自动驾驶域控制器失效引起的系统故障,自动驾驶域控制器也要采用冗余设计(一般采用双冗余设计),当主要自动驾驶域控制器失效时,备用自动驾域控制器工作。功能安全需要的冗余设计带来更为复杂的电子电气架构设计。
3.2 通讯架构升级
随着汽车电子电气架构日益复杂化,其中传感器、控制器和接口越来越多,自动驾驶也需要海量的数据用于实时分析决策,要求车内外通信具有高吞吐速率、低延时和多通信链路,这对架构的通讯能力提出了更高的要求。通讯架构的升级是电子电气架构亟需解决的问题,以满足智能网联汽车数据高速传输、低延迟等性能要求。
3.3 算力黑洞
智能网联汽车的发展对于电子电气架构的另外一个挑战是控制器算力,智能网联汽车功能繁多,对于汽车处理器性能的要求越来越高。有数据显示:自动驾驶等级提高一级,域控制器的算力要提高一个数量级。目前,L3 级别的自动驾驶需要 24 个TOPS 的算力,L4 级别的自动驾驶需要 4000+ TOPS 的算力。如此巨大的算力需求,对于电子电气构架是个巨大的考验。
4. 结论
汽车产业智能网联化的发展,需要越来越多的复杂的传感器和执行器,这对汽车电子电气架构提出了更高的要求,互联网技术和计算机技术的愈发成熟催生着电子电气架构发生着深刻的变革。当前,汽车电子电气架构主流形式是采用多域型控制器,未来会逐渐向拓展域和复合域过渡。另外,汽车电子电气架构的变革与发展,机遇和挑战并存,功能安全、通讯架构升级、算力黑洞问题是不可避免的问题,但是互联网和计算机技术的飞速发展使得问题被解决成为可能。
1. 概述
电子技术在汽车系统上的应用是保证车辆新功能的硬件基础。电子电气设备的应用为今天的汽车提供了更高的性能,更舒适的驾驶体验,更高的安全水平及更低的尾气排放。随着计算机和网络技术的飞速发展,汽车工业开始了智能网联化发展,这要求汽车电子电气由提供非重要功能演变到辅助驾驶,从感知和驱动等系统执行器件演变为高性能、高负荷的处理模块。
这表明电子电气在汽车系统中扮演着越来越重要的角色,开始处理越来越复杂的功能性问题。将各类传感器、线束、控制器、各个系统和软硬件有机的结合起来,构成集成化、功能化、智能化的电子电气系统已经成为必然趋势。随着汽车智能化的发展,汽车上车载电子元器件和电子控制单元的数量增加,汽车功能的越来越多、车载设备间通讯网络越来越复杂,对车载设备的性能要求越来越高。为了适应智能网联汽车的发展,对电子电气架构的发展也提出了新的要求。
2. 电子电气架构发展
汽车电子电气系统架构的发展,由20世纪80年代最初的分布式架构逐渐发展为当前的高度智能和融合化(如图1所示)。
图1 汽车电子电气架构演变示意
发展初期,不同的电子控制单元(ECU)通过等效网络接口通过通信链路连接,实现有效通信。而随着技术的发展,不同电子控制单元(ECU)合并以及硬件系统的集成化设计,使得汽车电子电气架构逐渐过渡到模块化和集成化,促进了不同电子控制单元(ECU)之间的相互通信和融合,这种变化趋势随着车辆智能网联化的需要会得到进一步的发展。而且,大数据和互联网技术的愈发成熟,使得人-车-环境多维度融合交互通信称为可能,使用大数据云处理器控制车辆也逐渐成为可能。
车辆智能网联化发展,带来车辆自身个体复杂程度的增加、车辆各系统之间的交互通信增加、车辆之间的互联通信增加。这对于电子电气的通信能力及架构的延展性提出更高的要求。车载电子电气架构的设计和搭建需要考虑的因素就更多。例如实时性需求、诊断服务请求等以整车功能导向为目标的要求。下面就当前市场应用及研究发展中的车载电子电气架构做详细介绍。
当前,汽车市场在用的车载电子电气架构主要以多域控制器为主,目前,国外主流主机厂一般采用主要采用以多域控制器及中央集中+区域控制器相结合的电子电气架构,将车辆分为不同的子模块即不同的域,比如动力总成域、底盘域、车身域、娱乐媒体域等。
不同的域对域内的电子控制单元(ECU)进行整合,域内的ECU通过共享总线系统进行通信。中央网管用于连接不同的域,实现不同域之间的信息交互和数据通信。其中,特斯拉 Model 3 的电子电气架构由 CCM(即自动驾驶及娱乐域控制模块融合)、前车身控制器、右车身控制器、左车身控制器所构成(如图2所示)。
图2 特斯拉 Model 3 的电子电气架构组成
按照车辆的位置对车辆系统控制进行了区域划分,这样的控制器布置简化了线束,提高了系统效率。CCM 模块主要作为整车的决策中心,负责处理所有辅助驾驶相关的传感器。同时,对主要核心控制器进行数据处理、决策仲裁。各控制器之间通过共享总线系统进行通信,及时将监测到的车辆信息反馈给 CCM,保证与各控制器及 CCM 模块之间的实时通信。
另外,丰田公司提出了采用中央集中 + 区域控制器相结合的电子电气架构方案。这种方案为每个域集成高性能控制器,即域控制器,提供域内的通信和域外的连接。这种结构由于大部分数据交换发生在域内,减少了 ECU 内部来自中央网关的通信。有助于 ECU 在硬件系统上的集成化,有效降低了控制器成本。通过使用基于 Adaptive AUTOSAR 和 Classic AUTOSAR 的混合架构,实现便捷的固件升级以及功能的可拓展性。同时,该架构在硬件、线束布置上,减少了线束的长度、降低了线束的设计复杂程度,轻量化设计、降低重量。与此同时,在设备安装上,中央集中式电子电气架构逐步减少了控制器、ECU 的数量和线束长度,为后续固件升级预留更多的空间。
为了解决智能网联汽车在系统、软件升级对汽车内部通信速率、计算能力以及电子电气架构的可延展性要求,主流互联网公司和车企设计开发满足智能网联汽车通信需求的新架构[5]。其中,华为提出了一款 C-C 概念架构(如图 3 所示),
图3 华为 C-C 架构模型
即“分布式网络 + 域控制器的架构”,该架构主要是将汽车分为智能座舱域、整车控制域以及智能驾驶域三部分。通过华为计划未来通过域控制器和操作系统打造的 CC 架构可以做到软件在线升级、硬件在线更换升级以及传感器的可拓展性,以达到软件定义汽车的目标。
联合汽车电子公司为智能网联汽车设计开发了扩展型域控制器(如图 4 所示)。
图4 拓展型控制器架构示意图
根据未来智能网联汽车的功能需求,拓展型域控制器架构分为云 - 管 - 端一体化设计,顶层为云端服务平台,中间层为计算与控制层,底层为标准化执行器与传感器层。该架构将标准化执行与传感器层分为信息娱乐域、车身域、动力总成域、底盘域、辅助 / 自动驾驶域。在这种架构中,根据智能网联车辆行驶过程中的数据需求,通过底层传感器层进行数据收集,在中间层进行数据处理与分析,最终反馈到云端。云端服务器根据需要处理的信息,为不同车辆设备提供灵活性的集群处理,符合未来智能网联汽车的功能需求。
3. 电子电气架构未来发展的机遇和挑战
未来,自动驾驶要求更高的算力和更多传感器件,汽车内部的快速电子化让电子架构不堪重负,对于未来汽车电子架构来说,更应该做减法了。当然,互联网技术(5G+)愈发成熟,将大大加快电子电气架构在当前基础上的进一步深度演进。倘若通信网络带宽足够的宽,通信延迟足够的低,这一趋势将会更加明显。此外,计算机技术的高速发展促进控制器计算能力向中央集中,向云端集中演变;汽车电子电气架构的演进也朝着集成式,甚至服务器式这一方向前行。目前,车载服务器已经被开发,其高性能计算机可用于预定义功能的应用软件和第三方软件及服务平台,凭此可实现新的移动概念,可增强终端用户体验。这对于汽车电子电气架构而言,都是未来发展的驱动力量和发展机遇。但是,不可否认,车辆智能网联化发展对汽车电子电气架构带来了更高的要求,更大的挑战。其中主要包括以下几个方面:
3.1 功能安全
功能安全是指避免由系统功能故障导致的不可接受的风险,重点关注系统故障之后的行为因素。致力于找出找出所有可能的系统失效原因,并针对这些失效制定出相应的安全机制,采取相应的安全措施。电子电气架构面临的功能安全挑战主要体现在感知冗余和自动驾驶控制冗余。车辆的电子电气架构从最初的单激光雷达单摄像头架构,到后来多激光雷达多摄像头架构及复合摄像头架构,这些架构中的不同的种类的摄像头、激光雷达都需要进行安全冗余设计。以防止在传感器出现故障后,系统依靠冗余备份的传感器进行工作,以保证车辆的正常行驶。自动驾驶系统中,自动驾驶域控制器主要是负责决策、路径规划控制。为了避免由于自动驾驶域控制器失效引起的系统故障,自动驾驶域控制器也要采用冗余设计(一般采用双冗余设计),当主要自动驾驶域控制器失效时,备用自动驾域控制器工作。功能安全需要的冗余设计带来更为复杂的电子电气架构设计。
3.2 通讯架构升级
随着汽车电子电气架构日益复杂化,其中传感器、控制器和接口越来越多,自动驾驶也需要海量的数据用于实时分析决策,要求车内外通信具有高吞吐速率、低延时和多通信链路,这对架构的通讯能力提出了更高的要求。通讯架构的升级是电子电气架构亟需解决的问题,以满足智能网联汽车数据高速传输、低延迟等性能要求。
3.3 算力黑洞
智能网联汽车的发展对于电子电气架构的另外一个挑战是控制器算力,智能网联汽车功能繁多,对于汽车处理器性能的要求越来越高。有数据显示:自动驾驶等级提高一级,域控制器的算力要提高一个数量级。目前,L3 级别的自动驾驶需要 24 个TOPS 的算力,L4 级别的自动驾驶需要 4000+ TOPS 的算力。如此巨大的算力需求,对于电子电气构架是个巨大的考验。
4. 结论
汽车产业智能网联化的发展,需要越来越多的复杂的传感器和执行器,这对汽车电子电气架构提出了更高的要求,互联网技术和计算机技术的愈发成熟催生着电子电气架构发生着深刻的变革。当前,汽车电子电气架构主流形式是采用多域型控制器,未来会逐渐向拓展域和复合域过渡。另外,汽车电子电气架构的变革与发展,机遇和挑战并存,功能安全、通讯架构升级、算力黑洞问题是不可避免的问题,但是互联网和计算机技术的飞速发展使得问题被解决成为可能。



编辑推荐




最新资讯
-
R171.01对DCAS的要求⑤
2025-04-20 10:58
-
自动驾驶卡车创企Kodiak 将通过SPAC方式上
2025-04-19 20:36
-
编队行驶卡车仍在奔跑
2025-04-19 20:29
-
全国汽车标准化技术委员会汽车节能分技术委
2025-04-18 17:34
-
我国联合牵头由DC/DC变换器供电的低压电气
2025-04-18 17:33
