




 广告
广告





















































如何将安全自动驾驶推向新高度?——Valeo 与 TomTom最新POC概念验证
2021-05-24 17:47:51· 来源:TomTom

随着自动驾驶正朝着更高的自动化水平发展,驾驶者正将手里的驾驶控制权慢慢移交出去。为了保证所有驾驶者们的安全,汽车制造商必须在自动驾驶过程的每个步骤中建
随着自动驾驶正朝着更高的自动化水平发展,驾驶者正将手里的驾驶控制权慢慢移交出去。为了保证所有驾驶者们的安全,汽车制造商必须在自动驾驶过程的每个步骤中建立更多的准确性和冗余设计。TomTom 与 Valeo 的最新POC概念验证正是如此:提供多传感器地图冗余,向完全自动化迈进一步。
为了实现安全驾驶,自动驾驶车辆不仅需要能够了解其周围的环境,还需要确定在该环境中的准确位置——也称为定位。通过自我定位,车辆可以确定其与周围环境的精确地理位置关系。它是在中间车道还是在右侧车道?离路边有多远?
为实现高效定位,车辆传感器必须与高精地图(HD map)协同工作。后者允许车辆将其车辆传感器检测到的信息与地图上的信息相匹配,帮助车辆确定其在道路上的确切位置,并计划安全驾驶。使用 TomTom HD Map 与 RoadDNA 定位套件,结合 Valeo SCALA® 3D LiDAR 和 Drive4U® Locate 技术,我们可以利用多个传感器和多层地图数据来提高道路定位系统的鲁棒性。
证明多传感器价值
作为全球驾驶辅助传感器的领导者,Valeo 是第一家实现车规级3D LiDAR 激光雷达量产和应用的的公司。该公司的 Valeo SCALA® 3D 激光雷达使用光束来检测静态或移动的障碍物,使车辆可以实现360° 监控周围环境。在最新的概念验证中,TomTom 和Valeo 通过使用 Valeo 定位软件将 ValeoSCALA® 3D LiDAR 的输出与 TomTom HD Map 中的 RoadDNA 数据准确匹配,成功演示了多传感器定位技术。
RoadDNA 由 TomTom HDMap 中与传感器无关的定位层组成,如交通标志和关于路边的 3D 图案信息,可帮助摄像头和 LiDAR 等传感器实现精确定位。通过为地图数据和定位创建冗余能够提高安全性,且使用多传感器的方法也能提高系统的鲁棒性。大多数供应商只能将一个传感器(例如摄像头)与地图中一种类型的数据联系起来——这是一种单传感器定位方法。如果此传感器发生故障,车辆将无法正确定位。如我们与Valeo概念验证那样,使用多传感器方法,可以避免这一潜在的危险和缺点。即使一个传感器出现故障或无法准确确定其周围环境,这种方法仍能确保车辆准确定位;例如,由于大雪或浓雾导致能见度低等情况。
目前,TomTom 和 Valeo 的联合解决方案在东京、巴黎和旧金山的独立驾驶测试中实现了高精度定位。
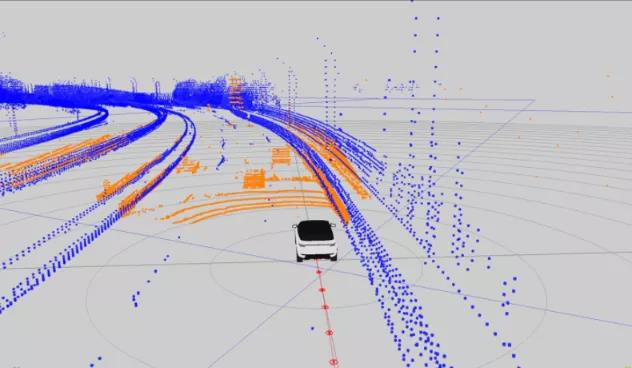
图片来源:TomTom official
一个经济高效可扩展的解决方案,可实现更高水平的自动化
Valeo SCALA® 点云数据的定位算法以及 TomTom RoadDNA 功能,具有广泛的适应性,可以在多种应用场景下重复使用。虽然 TomTom HD Map 和 RoadDNA 功能包可以使性能达到最佳,但 Valeo SCALA® LiDAR 系统可以无需依靠供应商实现全球覆盖。最后,该系统有助于汽车制造商降低成本,因为它不需要 RTK-PPP GPS。
这一概念验证通过解决该行业的痛点,为提高自动驾驶安全性添砖加瓦。TomTom 和 Valeo 将两个自动驾驶领域领导者的专业知识结合到一起,通过使用多传感器和地图层创建定位冗余。通过将点云数据与 TomTom HD Map 中RoadDNA 进行匹配,成功演示了高精度定位,将安全自动驾驶推向新高度。
为了实现安全驾驶,自动驾驶车辆不仅需要能够了解其周围的环境,还需要确定在该环境中的准确位置——也称为定位。通过自我定位,车辆可以确定其与周围环境的精确地理位置关系。它是在中间车道还是在右侧车道?离路边有多远?
为实现高效定位,车辆传感器必须与高精地图(HD map)协同工作。后者允许车辆将其车辆传感器检测到的信息与地图上的信息相匹配,帮助车辆确定其在道路上的确切位置,并计划安全驾驶。使用 TomTom HD Map 与 RoadDNA 定位套件,结合 Valeo SCALA® 3D LiDAR 和 Drive4U® Locate 技术,我们可以利用多个传感器和多层地图数据来提高道路定位系统的鲁棒性。
证明多传感器价值
作为全球驾驶辅助传感器的领导者,Valeo 是第一家实现车规级3D LiDAR 激光雷达量产和应用的的公司。该公司的 Valeo SCALA® 3D 激光雷达使用光束来检测静态或移动的障碍物,使车辆可以实现360° 监控周围环境。在最新的概念验证中,TomTom 和Valeo 通过使用 Valeo 定位软件将 ValeoSCALA® 3D LiDAR 的输出与 TomTom HD Map 中的 RoadDNA 数据准确匹配,成功演示了多传感器定位技术。
RoadDNA 由 TomTom HDMap 中与传感器无关的定位层组成,如交通标志和关于路边的 3D 图案信息,可帮助摄像头和 LiDAR 等传感器实现精确定位。通过为地图数据和定位创建冗余能够提高安全性,且使用多传感器的方法也能提高系统的鲁棒性。大多数供应商只能将一个传感器(例如摄像头)与地图中一种类型的数据联系起来——这是一种单传感器定位方法。如果此传感器发生故障,车辆将无法正确定位。如我们与Valeo概念验证那样,使用多传感器方法,可以避免这一潜在的危险和缺点。即使一个传感器出现故障或无法准确确定其周围环境,这种方法仍能确保车辆准确定位;例如,由于大雪或浓雾导致能见度低等情况。
目前,TomTom 和 Valeo 的联合解决方案在东京、巴黎和旧金山的独立驾驶测试中实现了高精度定位。
图片来源:TomTom official
一个经济高效可扩展的解决方案,可实现更高水平的自动化
Valeo SCALA® 点云数据的定位算法以及 TomTom RoadDNA 功能,具有广泛的适应性,可以在多种应用场景下重复使用。虽然 TomTom HD Map 和 RoadDNA 功能包可以使性能达到最佳,但 Valeo SCALA® LiDAR 系统可以无需依靠供应商实现全球覆盖。最后,该系统有助于汽车制造商降低成本,因为它不需要 RTK-PPP GPS。
这一概念验证通过解决该行业的痛点,为提高自动驾驶安全性添砖加瓦。TomTom 和 Valeo 将两个自动驾驶领域领导者的专业知识结合到一起,通过使用多传感器和地图层创建定位冗余。通过将点云数据与 TomTom HD Map 中RoadDNA 进行匹配,成功演示了高精度定位,将安全自动驾驶推向新高度。



编辑推荐




最新资讯
-
中汽中心工程院能量流测试设备上线全新专家
2025-04-03 08:46
-
上新|AutoHawk Extreme 横空出世-新一代实
2025-04-03 08:42
-
「智能座椅」东风日产N7为何敢称“百万级大
2025-04-03 08:31
-
基于加速度计补偿的俯仰角和路面坡度角估计
2025-04-03 08:30
-
《北京市自动驾驶汽车条例》正式实施 L3级
2025-04-02 20:23
