




 广告
广告





















































SAE J3016:驾驶自动化分级(2021年4月,中文版)
2021-05-25 00:16:42· 来源:北京市高级别自动驾驶示范区

3.13
车队运营[功能]
支持无人驾驶操作的ADS车辆车队管理的活动,包括但不限于:
•确保运营准备。
•在无人驾驶的情况下调度配备ADS的车辆(即,在将车辆投入公共道路服务之前,使用ADS)。
•批准每次行程(例如,付款、出行路线选择)。
•为使用中的车辆提供车队资产管理服务(例如,管理紧急情况、根据需要呼叫或提供远程协助、响应客户请求和故障)。
•在车辆使用期间,作为执法、应急响应和其他机构的责任代理人。
•在服务结束时断开ADS。
•根据需要进行车辆维修和保养。
3.14
车辆横向运动控制
DDT子任务包括实时、持续调节车辆运动y轴分量所需的活动(见图9)。
注:车辆横向运动控制包括检测车辆相对于车道边界的定位,并应用转向和/或差速制动输入来保持适当的横向定位。
3.15
车辆纵向运动控制
DDT子任务包括实时、持续调节车辆运动x轴分量所需的活动(见图9)。
注:根据使用规范,车辆纵向运动控制可能包括向前和向后方向性。
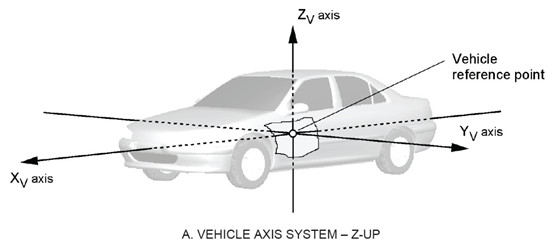
图9-车辆运动轴示意图(SAE J670)
3.16
最小风险条件
当给定的行程不能或不应继续时,用户或ADS可在执行DDT回退后将车辆平稳停车,以降低碰撞风险。
注1:在1级和2级,车内驾驶员应根据需要达到最低风险条件。
注2:在3级,考虑到ADS或车辆与DDT执行相关的系统故障,当其确定有必要时,DDT后备就绪用户应达到最低风险条件,或者在车辆可操作的情况下执行DDT。
注3:在4级和5级,ADS能够在必要时自动达到最低风险条件(即,由于ODD退出,如适用,或由于ADS或车辆执行DDT相关系统故障)。在4级和5级自动实现最低风险条件的特征将根据系统故障的类型和程度、有关ADS功能的ODD(如果有)以及发生系统故障或ODD退出时的特定操作条件而有所不同。可能需要自动将车辆停在其当前行驶路径内,或者可能需要更大范围的机动,以便将车辆从活动车道上移开和/或自动将车辆驶回调度设施。
示例1:设计用于在高速公路上高速驾驶车辆的4级ADS功能遇到DDT执行相关的系统故障,并在停车前自动将车辆从活动车道上挪移。
示例2:安装4级ADS的车辆在其主电源系统中遇到DDT执行相关系统故障。ADS使用备用电源,以达到最低风险条件。
3.17
[DDT执行相关]系统故障
驾驶自动化系统和/或其他车辆系统中的故障,妨碍驾驶自动化系统持续可靠地执行其部分DDT,包括其本应执行的完整DDT。
注1:本定义适用于车辆故障条件和驾驶自动化系统故障,这些故障会妨碍驾驶自动化系统按照设计意图以最大能力运行。
注2:这一术语不适用于1级或2级驾驶员支持功能因固有设计限制而导致的性能暂时失效,并且不会妨碍系统持续执行部分DDT。
示例1:执行DDT横向车辆运动控制子任务的1级驾驶员支持功能在其一个摄像头中遇到DDT执行相关的系统故障,这使其无法可靠地检测车道标记。该功能使故障指示信息显示在中控台上,同事该功能自动断开,要求驾驶员立即恢复执行DDT的横向车辆运动控制子任务。
例2: 3级ADS的一个雷达传感器出现DDT执行相关的系统故障,这使其无法可靠地检测车辆路径中的物体。ADS通过向DDT备用用户发出干预请求来作出响应。ADS继续执行DDT,同时降低车速,持续数秒,以便DDT后备就绪用户有时间有序地恢复车辆运行。
例3:一辆配有激活的3级ADS车辆突然爆胎,导致车辆操控性非常差,给后备就绪用户提供充足的知觉反馈,表明车辆故障需要干预。备用支援用户通过恢复执行DDT、打开危险指示灯并将车辆停到最近的路肩上来做出响应,从而实现最小的风险状况。
例4: 4级ADS的一个计算模块发生DDT执行相关系统故障。ADS通过使用冗余计算模块来实现最小风险条件,从而过渡到DDT后备。
3.18
监视器
描述一系列功能,包括实时人或机器感知和处理用于操作车辆或支持车辆运行的数据的一个通用术语。
注1:当通用术语“监视器”及其衍生工具不够精确时,应使用以下术语来描述监控类型。
注2:以下四个术语(1-监控用户,2-监控驾驶环境,3-监控车辆性能,4-监控驾驶自动化系统性能)描述了监控的类别(见主要参与者的范围)。
注3:驾驶员接受DDT执行相关系统故障警报或其他指标的状态或条件,如第3级所述,不是一种监测形式。接受能力和监控能力之间的区别最好用一个例子来说明:一个意识到火警或电话铃响的人不一定一直在监控火警或电话。同样,意识到拖车挂接装置脱落的用户不一定一直在监视拖车挂接装置。相比之下,配备主动1级自适应巡航控制(ACC)系统的车辆上的驾驶员需要同时监控驾驶环境和ACC性能,否则就不会等待警报提醒他/她注意需要响应的情况(见3.22)。
3.18.1 监视用户
设计用于评估用户是否以及在多大程度上执行为其指定的角色的活动和/或自动化例程操作。
注1:驾驶自动化环境下的用户监控最有可能被部署为对驾驶自动化系统的误用或滥用(包括因自满而过度依赖)的对策,但也可用于其他目的。
注2:用户监控主要适用于2级和3级,因为来自现场的关于1级功能使用的证据尚未确定滥用或滥用驾驶自动化技术的重大发生率,并且在这些级别以上,根据定义,ADS能够自动达到最低风险条件。
3.18.2 监控驾驶环境
根据车辆运行的需要,完成实时道路环境目标和事件检测、识别、分类和响应准备(不包括实际响应)的活动和/或自动化例程。
注:当驾驶未配备ADS的传统车辆时,驾驶员在视觉上对道路场景进行充分采样,以充分执行DDT,同时执行需要短时间眼睛离开道路的次要任务(例如,调整座舱舒适度设置、扫描道路标志、调校收音机等)。因此,监控驾驶环境并不一定需要驾驶员持续用眼观察道路。
3.18.3 监测车辆性能[与DDT执行相关的系统故障]
根据车辆运行的需要,完成车辆性能实时评估和响应准备的活动和/或自动化例程操作。
注意:执行DDT时,4级和5级ADSs监测车辆性能。然而,对于3级ADSs以及1级和2级驾驶自动化系统,假设人类驾驶员能够接受对执行DDT产生不利影响的车辆条件(见3.22)。
示例1:当2级驾驶员支持功能在拥堵交通中工作时,制动卡钳故障会导致车辆在踩下制动器时稍微向左拉。人类驾驶员观察到车辆偏离其车道,并纠正车辆的横向位置或完全断开此功能。
示例2:当4级ADS处于走走停停时,制动卡钳故障会导致车辆在制动时向左拉。ADS识别此偏差,校正车辆的横向位置,并转换到跛行模式,直到达到最低风险状态。
3.18.4 监控驾驶自动化系统性能
用于评估驾驶自动化系统是否正确执行部分或全部DDT的活动和/或自动化例程。
注1:术语“监控驾驶自动化系统性能”不应代替“监控”,它包括执行DDT所需的监控和响应,因此更为全面。
注2:识别驾驶自动化系统发出的干预请求并不是监控驾驶自动化系统性能的一种形式,而是一种接受性的形式。
注3:在1级和2级,作为监控的一部分,驾驶员监控驾驶员支持功能的执行情况。
注4:在更高级别的驾驶自动化(3至5级)中,ADS监控其完整DDT的执行。
示例1:车内驾驶员监控一个激活的ACC功能,以验证其在弯道中跟随前车时是否保持了适当的间隙。
示例2:正使用2级自动泊车功能的远程驾驶员监控车辆路径,以验证该功能是否对行人和障碍物做出响应。
3.19
目标和事件检测与响应(OEDR)
DDT的子任务包括监控驾驶环境(检测,识别和分类目标和事件并准备根据需要进行响应),并对这些对象和事件执行适当的响应(即根据需要完成 DDT 和/或 DDT召回)。
3.20
操作[机动车辆]
在行程中由(人)驾驶员(有或没有 1 级或 2 级驾驶自动化功能的支持)或 ADS(3-5级)执行给定车辆的整个 DDT 的活动。
注 1:本文档中不使用术语“驾驶”,虽然在许多情况下,可以正确使用它来代替“操作”。
注 2:虽然术语“操作”)的使用意味着存在“操作员”,但是本文件中未定义或使用该术语,对各种类型配备 ADS 的车辆用户提供了非常具体的术语和定义( 见 3.32)。
3.21
操作设计域(ODD)
特定驾驶自动化系统或功能的运行条件,是专门用于运行设计的;包括但不限于环境,地理和时间限制,以及某些必要或不必要存在的交通或道路特征。
注1:虽然3级和4级ADS功能/车辆设计为仅在各自的操作设计域(ODD)范围内运行,但在道路运行期间,一些ODD条件会发生快速变化(例如,恶劣天气、车道线模糊)。操作环境中的这种瞬时变化不一定代表“ODD退出”,因为ADS确定这种条件变化何时需要回退性能(无论是由后备就绪用户还是ADS)。
注2:第 6 节讨论 ODD 在驾驶自动化等级体系的重要性。
示例1: 1级ACC驾驶员支持功能设计用于在晴朗天气条件下,在完全进入控制的高速公路上为驾驶员提供纵向车辆运动控制支持。
示例 2: 设计 ADS 功能在高速公路的低速交通拥堵中操作车辆,而且是晴朗的天气条件和最佳的道路维护条件下(例如,良好的车道标记,而且不在建设中)。
示例 3: 设计 ADS 专用车辆仅在地理范围明确的军事基地内运行,并且仅在白天以不超过 25 英里/小时的速度运行。
示例 4: 设计 ADS 专用商用卡车用于从地理围栏的海港中获取零件,并通过特定路线将其运送到 30 英里外的配送中心。车辆的 ODD 仅限于指定海港内的日间以及连接海港与配送中心之间的特定道路运行。
示例5:3级ADS高速功能(具有清晰可见车道线的ODD要求)遇到一段短的车道线模糊的道路。ADS功能能够通过其他方式(例如,传感器融合、数字地图、引导车辆跟驰)补偿短暂褪色或丢失的车道标记,并在车道线再次清晰可见之前继续对车辆进行短暂的操作。不久之后,车道线再次变得模糊,并保持更长时间,导致ADS功能向后备就绪用户发出干预请求。
3.22
感知[用户]
意识的一个方面,其特征在于一个人能够可靠和适当地集中注意力来应对刺激。
注 1:在 0-2 级的驾驶自动化中,司机有望感受明显的车辆系统故障,例如断杆。
注 2:在第 3 级驾驶自动化中,DDT 召回后备用户被认为能接受干预请求,和/或感知明显的车辆系统故障,无论车辆系统故障时 ADS 是否发出请求。
示例 1:当第 3 级 ADS 在停停走走交通中执行 DDT 时,左前胎突然爆胎。DDT后备就绪用户能够接受车辆明显向左拉的动觉提示,并进行干预,以便将车辆移到路肩上。
示例 2:当 3 级 ADS 在高速公路上执行 DDT 时,左侧镜玻璃从壳体中脱落。DDT召回后备人员,在感知状态,但没有也不会注意到这个故障,因为它不明显,并且不会对ADS执行动态驾驶任务(DDT)产生不利影响。
3.23
远程辅助
由远程人员(见3.31.5)向无人驾驶的ADS车辆提供事件驱动的信息或建议,以便在ADS遇到无法处理情形助力行程继续。
注1:远程辅助不包括远程驾驶员执行实时DDT或后备支援。更确切地说,ADS执行全部DDT和/或回退,即使是在远程人类的协助下。
注2:远程辅助可能包括向ADS提供修改后的目标和/或任务。
注3:远程辅助功能不包括提供有关目的地选择或行程启动时间(即调度功能)的战略指示,即使同一个人同时执行远程协助和调度功能。
示例1: 4级ADS-DV在其ODD范围内遇到未通知的道路施工区域。ADS-DV与远程人员通信,表明其无法在施工现场进行。远程人员为车辆提供了一条新的路径,使ADS-DV能够绕施工区域自动行驶并完成行程。
示例2: 4级ADS-DV检测到车道上的物体看起来太大,无法驶过并停车。远程助理使用车辆的摄像头来识别物体是一个可以安全通过/越过的空袋子,并向ADS-DV提供继续操作的指令。
车队运营[功能]
支持无人驾驶操作的ADS车辆车队管理的活动,包括但不限于:
•确保运营准备。
•在无人驾驶的情况下调度配备ADS的车辆(即,在将车辆投入公共道路服务之前,使用ADS)。
•批准每次行程(例如,付款、出行路线选择)。
•为使用中的车辆提供车队资产管理服务(例如,管理紧急情况、根据需要呼叫或提供远程协助、响应客户请求和故障)。
•在车辆使用期间,作为执法、应急响应和其他机构的责任代理人。
•在服务结束时断开ADS。
•根据需要进行车辆维修和保养。
3.14
车辆横向运动控制
DDT子任务包括实时、持续调节车辆运动y轴分量所需的活动(见图9)。
注:车辆横向运动控制包括检测车辆相对于车道边界的定位,并应用转向和/或差速制动输入来保持适当的横向定位。
3.15
车辆纵向运动控制
DDT子任务包括实时、持续调节车辆运动x轴分量所需的活动(见图9)。
注:根据使用规范,车辆纵向运动控制可能包括向前和向后方向性。
图9-车辆运动轴示意图(SAE J670)
3.16
最小风险条件
当给定的行程不能或不应继续时,用户或ADS可在执行DDT回退后将车辆平稳停车,以降低碰撞风险。
注1:在1级和2级,车内驾驶员应根据需要达到最低风险条件。
注2:在3级,考虑到ADS或车辆与DDT执行相关的系统故障,当其确定有必要时,DDT后备就绪用户应达到最低风险条件,或者在车辆可操作的情况下执行DDT。
注3:在4级和5级,ADS能够在必要时自动达到最低风险条件(即,由于ODD退出,如适用,或由于ADS或车辆执行DDT相关系统故障)。在4级和5级自动实现最低风险条件的特征将根据系统故障的类型和程度、有关ADS功能的ODD(如果有)以及发生系统故障或ODD退出时的特定操作条件而有所不同。可能需要自动将车辆停在其当前行驶路径内,或者可能需要更大范围的机动,以便将车辆从活动车道上移开和/或自动将车辆驶回调度设施。
示例1:设计用于在高速公路上高速驾驶车辆的4级ADS功能遇到DDT执行相关的系统故障,并在停车前自动将车辆从活动车道上挪移。
示例2:安装4级ADS的车辆在其主电源系统中遇到DDT执行相关系统故障。ADS使用备用电源,以达到最低风险条件。
3.17
[DDT执行相关]系统故障
驾驶自动化系统和/或其他车辆系统中的故障,妨碍驾驶自动化系统持续可靠地执行其部分DDT,包括其本应执行的完整DDT。
注1:本定义适用于车辆故障条件和驾驶自动化系统故障,这些故障会妨碍驾驶自动化系统按照设计意图以最大能力运行。
注2:这一术语不适用于1级或2级驾驶员支持功能因固有设计限制而导致的性能暂时失效,并且不会妨碍系统持续执行部分DDT。
示例1:执行DDT横向车辆运动控制子任务的1级驾驶员支持功能在其一个摄像头中遇到DDT执行相关的系统故障,这使其无法可靠地检测车道标记。该功能使故障指示信息显示在中控台上,同事该功能自动断开,要求驾驶员立即恢复执行DDT的横向车辆运动控制子任务。
例2: 3级ADS的一个雷达传感器出现DDT执行相关的系统故障,这使其无法可靠地检测车辆路径中的物体。ADS通过向DDT备用用户发出干预请求来作出响应。ADS继续执行DDT,同时降低车速,持续数秒,以便DDT后备就绪用户有时间有序地恢复车辆运行。
例3:一辆配有激活的3级ADS车辆突然爆胎,导致车辆操控性非常差,给后备就绪用户提供充足的知觉反馈,表明车辆故障需要干预。备用支援用户通过恢复执行DDT、打开危险指示灯并将车辆停到最近的路肩上来做出响应,从而实现最小的风险状况。
例4: 4级ADS的一个计算模块发生DDT执行相关系统故障。ADS通过使用冗余计算模块来实现最小风险条件,从而过渡到DDT后备。
3.18
监视器
描述一系列功能,包括实时人或机器感知和处理用于操作车辆或支持车辆运行的数据的一个通用术语。
注1:当通用术语“监视器”及其衍生工具不够精确时,应使用以下术语来描述监控类型。
注2:以下四个术语(1-监控用户,2-监控驾驶环境,3-监控车辆性能,4-监控驾驶自动化系统性能)描述了监控的类别(见主要参与者的范围)。
注3:驾驶员接受DDT执行相关系统故障警报或其他指标的状态或条件,如第3级所述,不是一种监测形式。接受能力和监控能力之间的区别最好用一个例子来说明:一个意识到火警或电话铃响的人不一定一直在监控火警或电话。同样,意识到拖车挂接装置脱落的用户不一定一直在监视拖车挂接装置。相比之下,配备主动1级自适应巡航控制(ACC)系统的车辆上的驾驶员需要同时监控驾驶环境和ACC性能,否则就不会等待警报提醒他/她注意需要响应的情况(见3.22)。
3.18.1 监视用户
设计用于评估用户是否以及在多大程度上执行为其指定的角色的活动和/或自动化例程操作。
注1:驾驶自动化环境下的用户监控最有可能被部署为对驾驶自动化系统的误用或滥用(包括因自满而过度依赖)的对策,但也可用于其他目的。
注2:用户监控主要适用于2级和3级,因为来自现场的关于1级功能使用的证据尚未确定滥用或滥用驾驶自动化技术的重大发生率,并且在这些级别以上,根据定义,ADS能够自动达到最低风险条件。
3.18.2 监控驾驶环境
根据车辆运行的需要,完成实时道路环境目标和事件检测、识别、分类和响应准备(不包括实际响应)的活动和/或自动化例程。
注:当驾驶未配备ADS的传统车辆时,驾驶员在视觉上对道路场景进行充分采样,以充分执行DDT,同时执行需要短时间眼睛离开道路的次要任务(例如,调整座舱舒适度设置、扫描道路标志、调校收音机等)。因此,监控驾驶环境并不一定需要驾驶员持续用眼观察道路。
3.18.3 监测车辆性能[与DDT执行相关的系统故障]
根据车辆运行的需要,完成车辆性能实时评估和响应准备的活动和/或自动化例程操作。
注意:执行DDT时,4级和5级ADSs监测车辆性能。然而,对于3级ADSs以及1级和2级驾驶自动化系统,假设人类驾驶员能够接受对执行DDT产生不利影响的车辆条件(见3.22)。
示例1:当2级驾驶员支持功能在拥堵交通中工作时,制动卡钳故障会导致车辆在踩下制动器时稍微向左拉。人类驾驶员观察到车辆偏离其车道,并纠正车辆的横向位置或完全断开此功能。
示例2:当4级ADS处于走走停停时,制动卡钳故障会导致车辆在制动时向左拉。ADS识别此偏差,校正车辆的横向位置,并转换到跛行模式,直到达到最低风险状态。
3.18.4 监控驾驶自动化系统性能
用于评估驾驶自动化系统是否正确执行部分或全部DDT的活动和/或自动化例程。
注1:术语“监控驾驶自动化系统性能”不应代替“监控”,它包括执行DDT所需的监控和响应,因此更为全面。
注2:识别驾驶自动化系统发出的干预请求并不是监控驾驶自动化系统性能的一种形式,而是一种接受性的形式。
注3:在1级和2级,作为监控的一部分,驾驶员监控驾驶员支持功能的执行情况。
注4:在更高级别的驾驶自动化(3至5级)中,ADS监控其完整DDT的执行。
示例1:车内驾驶员监控一个激活的ACC功能,以验证其在弯道中跟随前车时是否保持了适当的间隙。
示例2:正使用2级自动泊车功能的远程驾驶员监控车辆路径,以验证该功能是否对行人和障碍物做出响应。
3.19
目标和事件检测与响应(OEDR)
DDT的子任务包括监控驾驶环境(检测,识别和分类目标和事件并准备根据需要进行响应),并对这些对象和事件执行适当的响应(即根据需要完成 DDT 和/或 DDT召回)。
3.20
操作[机动车辆]
在行程中由(人)驾驶员(有或没有 1 级或 2 级驾驶自动化功能的支持)或 ADS(3-5级)执行给定车辆的整个 DDT 的活动。
注 1:本文档中不使用术语“驾驶”,虽然在许多情况下,可以正确使用它来代替“操作”。
注 2:虽然术语“操作”)的使用意味着存在“操作员”,但是本文件中未定义或使用该术语,对各种类型配备 ADS 的车辆用户提供了非常具体的术语和定义( 见 3.32)。
3.21
操作设计域(ODD)
特定驾驶自动化系统或功能的运行条件,是专门用于运行设计的;包括但不限于环境,地理和时间限制,以及某些必要或不必要存在的交通或道路特征。
注1:虽然3级和4级ADS功能/车辆设计为仅在各自的操作设计域(ODD)范围内运行,但在道路运行期间,一些ODD条件会发生快速变化(例如,恶劣天气、车道线模糊)。操作环境中的这种瞬时变化不一定代表“ODD退出”,因为ADS确定这种条件变化何时需要回退性能(无论是由后备就绪用户还是ADS)。
注2:第 6 节讨论 ODD 在驾驶自动化等级体系的重要性。
示例1: 1级ACC驾驶员支持功能设计用于在晴朗天气条件下,在完全进入控制的高速公路上为驾驶员提供纵向车辆运动控制支持。
示例 2: 设计 ADS 功能在高速公路的低速交通拥堵中操作车辆,而且是晴朗的天气条件和最佳的道路维护条件下(例如,良好的车道标记,而且不在建设中)。
示例 3: 设计 ADS 专用车辆仅在地理范围明确的军事基地内运行,并且仅在白天以不超过 25 英里/小时的速度运行。
示例 4: 设计 ADS 专用商用卡车用于从地理围栏的海港中获取零件,并通过特定路线将其运送到 30 英里外的配送中心。车辆的 ODD 仅限于指定海港内的日间以及连接海港与配送中心之间的特定道路运行。
示例5:3级ADS高速功能(具有清晰可见车道线的ODD要求)遇到一段短的车道线模糊的道路。ADS功能能够通过其他方式(例如,传感器融合、数字地图、引导车辆跟驰)补偿短暂褪色或丢失的车道标记,并在车道线再次清晰可见之前继续对车辆进行短暂的操作。不久之后,车道线再次变得模糊,并保持更长时间,导致ADS功能向后备就绪用户发出干预请求。
3.22
感知[用户]
意识的一个方面,其特征在于一个人能够可靠和适当地集中注意力来应对刺激。
注 1:在 0-2 级的驾驶自动化中,司机有望感受明显的车辆系统故障,例如断杆。
注 2:在第 3 级驾驶自动化中,DDT 召回后备用户被认为能接受干预请求,和/或感知明显的车辆系统故障,无论车辆系统故障时 ADS 是否发出请求。
示例 1:当第 3 级 ADS 在停停走走交通中执行 DDT 时,左前胎突然爆胎。DDT后备就绪用户能够接受车辆明显向左拉的动觉提示,并进行干预,以便将车辆移到路肩上。
示例 2:当 3 级 ADS 在高速公路上执行 DDT 时,左侧镜玻璃从壳体中脱落。DDT召回后备人员,在感知状态,但没有也不会注意到这个故障,因为它不明显,并且不会对ADS执行动态驾驶任务(DDT)产生不利影响。
3.23
远程辅助
由远程人员(见3.31.5)向无人驾驶的ADS车辆提供事件驱动的信息或建议,以便在ADS遇到无法处理情形助力行程继续。
注1:远程辅助不包括远程驾驶员执行实时DDT或后备支援。更确切地说,ADS执行全部DDT和/或回退,即使是在远程人类的协助下。
注2:远程辅助可能包括向ADS提供修改后的目标和/或任务。
注3:远程辅助功能不包括提供有关目的地选择或行程启动时间(即调度功能)的战略指示,即使同一个人同时执行远程协助和调度功能。
示例1: 4级ADS-DV在其ODD范围内遇到未通知的道路施工区域。ADS-DV与远程人员通信,表明其无法在施工现场进行。远程人员为车辆提供了一条新的路径,使ADS-DV能够绕施工区域自动行驶并完成行程。
示例2: 4级ADS-DV检测到车道上的物体看起来太大,无法驶过并停车。远程助理使用车辆的摄像头来识别物体是一个可以安全通过/越过的空袋子,并向ADS-DV提供继续操作的指令。



编辑推荐




最新资讯
-
每秒采集100万个数据 | 下一代USB DAQ产品-
2025-04-07 14:12
-
重型商用车辆和客车的动力学——振动环境
2025-04-07 14:11
-
2025年10大隐形车衣品牌排行榜
2025-04-07 10:40
-
沃尔沃卡车与Greenlane合作推动商业电动化
2025-04-07 08:42
-
江铃晶马:美标转欧标充电结构专利
2025-04-07 08:39
