




 广告
广告





















































SAE J3016:驾驶自动化分级(2021年4月,中文版)
2021-05-25 00:16:42· 来源:北京市高级别自动驾驶示范区

5.4
3级或3类-有条件驾驶自动化
在常规/正常操作下(见3.27),自动驾驶系统(ADS)持续执行特定操作设计域(ODD)整个动态驾驶任务(DDT),期望DDT支援就绪的用户接受ADS发出的干预请求,以及其他车辆系统中与DDT执行相关的系统故障,并将作出适当的响应。
注1:与1级和2级驾驶员支持功能不同,所有3级和4级ADS功能设计用于在启用中监控和执行操作设计域(ODD)限制条件,并防止超出规定ODD范围外的干预或操作。
注2:DDT后备就绪用户无需在3级ADS启用时对其进行监督,但应准备在ADS发出干预请求时恢复执行动态驾驶任务(DDT),或在故障条件妨碍车辆继续运行时执行应急准备(fallback)并达到最低风险条件。
注3:3级自动驾驶系统(ADS)的DDT后备就绪用户还应接受车辆系统中DDT执行相关的明显系统故障,这些故障不一定触发ADS发出干预请求,例如车身或悬架部件损坏。
注4:如果3级ADS中出现DDT执行相关的系统故障,或ADS退出其操作设计域(ODD),ADS将发出请求,在足够的时间内进行干预,以便支援就绪用户(无论是车内还是远程)做出适当响应。
注5:DDT支援就绪用户对干预请求的"适当"响应可能需要使车辆处于最低风险状态,或在ADS断开后继续操作车辆。
注6:尽管3级ADS功能预计不会有DDT后备性能,但3级功能可能能够在某些有限的条件下执行DTT回退并实现最低风险。
示例:ADS功能能够在低速、高速公路交通拥堵时执行整个动态驾驶任务(DDT)。
5.5
4级或4类-高度驾驶自动化
自动驾驶系统(ADS)持续执行特定ODD内整个动态驾驶任务(DDT)及DDT后备。
注1:用户无需监督4级ADS功能,也不需要在ADS工作中接受干预请求。如果用户未执行动态驾驶任务(DDT),4级ADS能够自动执行DTT后备,也能达到最低的风险条件。这种自动DDT后备和最低风险条件实现能力是4级和3级ADS功能的主要区别。这意味着使用4级ADS功能的车内用户是无需对DDT执行相关系统故障作出响应的乘客。
注2:4级ADS功能可设计为在整个行程中操作车辆(见3.7.3),或设计为仅在给定行程的一部分中操作车辆(见3.7.2),例如,为了完成给定行程,配备有4级ADS功能的车辆的用户在高速公路高速行驶条件下操作车辆时,需要在高速公路结束时执行DDT,以完成其预期行程;然而,如果用户在高速公路结束时未能接管(例如,因为他/她正在睡觉),ADS将自动执行DDT后备并实现最小的风险条件。与3级不同,4级功能用户在ADS工作时不是DDT备用用户(参见下面的示例2),因此不需要响应干预请求以执行后备。然而,如果4级子行程功能达到其ODD限制,ADS可能会向乘客发出警告,提醒其应继续驾驶以完成行程(请注意,在后一种情况下,所说的警报不是干预请求,因为它并不表示需要执行后备。)
示例1: 4级ADS功能能够在代客泊车期间执行整个DDT(即路缘到车门或反之亦然),无需任何驾驶员监督。
示例2:4级ADS功能能够在高速公路上持续运行期间(即在其ODD范围内)执行整个动态驾驶任务(DDT)(注:本例中设想了驾驶员座椅上有一个能够执行DDT的用户,因为驾驶员在进入高速公路之前就必须执行DDT,而在离开高速公路之后也必须执行DDT。因此,这样的功能会提醒用户,他/她应该在驶出ODD前不久恢复对车辆的操作,但如果用户未能响应这样的警报,ADS仍将执行DDT后备,并自动实现最小风险条件。)
示例3:无人驾驶操作调度员可使用4级ADS-DV,该ADS-DV能够在有限的地理区域(如住宅区、军事基地、大学校园)内沿预设路线行驶。
5.6
5级或5类-完全驾驶自动化
ADS无条件持续执行整个DDT和DDT后备(即,非特定ODD)操作。
注1:"无条件/非特定ODD"是指ADS可以在世界任何地方的道路上操作车辆,以及在常规车辆可以由熟练人类驾驶员合理操作的所有道路条件下操作车辆。这意味着,比如,没有经设计的天气,当日时间,及地理限制,何时何地ADS均可以操作车辆。但是,可能存在驾驶员无法控制的情况,在这些情况下,ADS也无法完成给定的行程(例如,暴风雪、道路被淹、眩光冰面等),直到或除非不利条件消除。在出现这种不可管理的情况时,ADS将采取DDT后备应急,以达到最低的风险条件(例如,将车辆停在路边,等待情况发生变化)。
注2:如果发生DDT执行相关系统故障(ADS或车辆),5级ADS自动执行DDT后备,并达到最低风险条件。
注3:用户无需监督5级ADS。
示例:带有ADS的车辆,一旦设置了目的地,就能够在公共道路上的整个行程中操作车辆,而不用考虑起点和终点或干预道路、交通和天气条件。
6、操作设计域(ODD)的重要性
从概念上讲,驾驶自动化系统的作用相对执行部分或全部动态驾驶任务(DDT)的用户而言,与执行功能角色的具体条件具有正交关系。例如,自适应巡航控制(ACC)的具体实现可以仅在高速、低速或全速域下工作。然而,为了简化,这种分类法将这两个轴归为一组驾驶自动化级别。级别1到级别4明确考虑了操作设计域(ODD)的限制。相反,5级(如0级)没有ODD限制(以8.8中的探讨为准)。
因此,准确描述某一功能(0级和5级除外)需要同时明确其驾驶自动化水平和操作设计域(ODD)。如上定义所述,这种驾驶自动化水平和ODD的结合称为使用规范,并且指定功能满足指定的使用规范。
由于ODD可能性范围很广,每个级别可能存在各种各样的可能功能(例如,级别4包括停车、高速、低速、地理围栏等)。因此,与驾驶自动化系统及其用户各自的角色相比,此分类法提供的有关可能定义给定功能的ODD属性的详细信息更少。
ODD对理解为什么一个给定的ADS不是5级仅仅因为它运行ADS专用车辆。与5级自动驾驶系统(ADS)不同,3级或4级ADS操作设计域(ODD)有限。ADS-DV的地理、速度、环境或其他ODD限制可能反映其ADS的技术限制,也可能反映出车辆设计的局限。
1级到4级的功能取决于有限的ODD。这些限制通常反映了驾驶自动化系统的技术能力。例如,在封闭区域运行的4级ADS-DV作为人员搬运工和机场班车已经存在了几十年。这类车辆的ODD非常简单,控制良好,物理封闭(车辆在固定路线上运行;物理屏障防止入侵;免受外部事件、天气等的影响)。这种高度结构化和简单的ODD使得实现4级驾驶自动化在技术上不那么具有挑战性。然而,3级ADS功能在混合交通的开放道路上操作车辆,并且在包括恶劣天气的环境中操作车辆,由于更复杂和非结构化的ODD,在ADS能力方面面临更高的技术门槛(见图11)。
另请注意,对于给定的驾驶自动化系统功能,ODD可能包含一组广泛的参数,这些参数定义了该功能在指定道路环境设计中运行的功能能力限制。它包括范围广泛的变量,如特定道路类型、天气条件、照明条件、地域限制以及是否存在某些道路特征,如车道标线、路侧交通障碍、中央分隔带等。因此,给定的驾驶自动化系统特征只有一个操作设计域(ODD),但此ODD可能是多种多样和多方面的。尽管ODD是由多个变量组成的,但说驾驶自动化功能具有多个ODD是不准确的。只有当所有ODD定义变量满足设计标准时,功能才会按设计运行(见3.26)。图12说明了ODD与驾驶自动化水平的正交性。
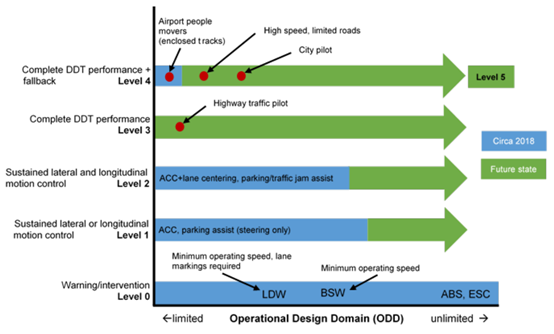
图11-相对于驾驶自动化水平的操作设计域(ODD)
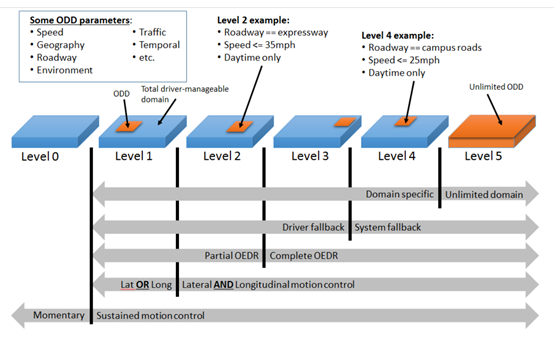
图12-相对于驾驶自动化水平的操作设计域(ODD)
7、不推荐使用的术语
为清楚起见,本节确定了本文件中未使用的某些不推荐使用的术语,因为它们在功能上不精确(因此具有误导性)和/或这些术语经常被用于较低水平的驾驶自动化(即1级和2级),其中驾驶自动化系统不执行整个动态驾驶任务(DDT)。
7.1
Autonomous, Driving Modes(s), Self-Driving, Unmanned, Robotic
像上面这样的方言术语有时用于描述驾驶自动化系统和/或配备这些系统的车辆时会出现不一致和混淆。因为自动化是利用电子或机械设备来代替人力,根据牛津英语词典,自动化(通过"驾驶"来提供上下文)是执行部分或全部动态驾驶任务(DDT)的系统的适当术语。使用其他术语会导致混淆、误解和降低可信度。
7.1.1 Autonomous
这个术语在机器人学和人工智能研究界已经使用了很长一段时间,用来表示有能力和有权独立并充分地做出决策的系统。随着时间的推移,这种用法被随意地扩展到不仅包含决策,而且代表整个系统的功能,从而成为自动化(Automated)的同义词。这种用法掩盖了所谓的"自主车辆"是否依赖与外部实体的通信和/或合作来实现重要功能(如数据采集和收集)的问题。如果一些驾驶自动化系统能够独立并充分地执行其所有功能,则它们可能确实是自主的,但是如果它们依赖于与外部实体的通信和/或合作,则应将其视为协作而不是自主的。一些方言用法特别将自动驾驶(Autonomous)与全自动驾驶(5级)联系起来,而其他用法将其应用于所有级别的驾驶自动化,一些州立法将其定义为与3级或以上的任何ADS(或配备此类ADS的任何车辆)大致对应。
此外,在法理学中,自主(autonomy)是指自治的能力。从这个意义上说,"自主"(Autonomous)在应用于自动驾驶技术时也是一个误称,因为即使是最先进的ADS也不是"自治的"。相反,ADS是基于算法运行的,否则就服从用户的命令。
基于这些原因,本文档不使用流行术语"自主"(Autonomous)来描述驾驶自动化。
7.1.2 Driving Mode(s)
在本文件的第一版中,使用术语"驾驶模式"代替"操作设计域(ODD)"。然而,"驾驶模式"是一个不精确的术语,排除了ODD的许多特征条件。基于这些原因,我们建议不要使用"驾驶模式"来描述给定驾驶自动化系统功能的ODD。
7.1.3 Self-Driving
这一术语的含义可能因对驾驶和驾驶员含义的未说明假设而有所不同。它被林林总总地用于指没有驾驶员在场的情况、没有用户正在执行DDT的情况以及驾驶自动化系统正在执行DDT的任何部分的情况。
7.1.4 Unmanned
该术语经常被误用来描述配备2级或更高级别驾驶自动化系统的任何车辆。"无人驾驶"(Unmanned)一词意味着车辆中没有人,这也可能会产生误导,因为它没有区分由遥控驾驶员驾驶的车辆和ADS驾驶的车辆,其中没有乘客有能力操作车辆。
7.1.5 Robotic
这个术语有时被用来指4级或5级驾驶自动化,例如封闭园区ADS-DV或"自动出租车",但在技术上是模糊的,因为任何自动化技术都可以被视为"自动"(Robotic),因此它没有传达有关自动驾驶系统(ADS)或车辆的有用信息。
7.2
Automated or Autonomous Vehicle
本文件建议不要使用将车辆(而不是驾驶)作为自动化对象的术语,因为这样做会导致(人工)驾驶员或ADS和ADS-DVs(ADS专用车辆)操作的车辆之间的混淆,它也未能区分不涉及部分或全部自动执行DDT的其他形式的车辆自动化。
此外,给定的车辆可配备驾驶自动化系统,该系统能够提供在不同级别上操作的多个驾驶自动化功能;因此,在任何给定实例中展示的驾驶自动化水平由所涉及的功能决定。
因此,用于描述具有驾驶自动化能力的车辆的推荐用法是"配备驾驶自动化系统的车辆的1级或2级"或配备ADS的车辆的"3级、4级,或5级] "。"用于描述配备有启用系统的车辆(与仅可用的系统相比)的推荐用法为"1级或2级驾驶自动化系统启用车辆"或"3级、4级或5级ADS操作车辆"
7.2
Control
在口语中,术语"控制"有时用于描述(人类)驾驶员或驾驶自动化系统的各自角色(例如,"驾驶员具有控制权")。本文件的作者们强烈反对,因此特意避免,这种潜在的问题口语用法。由于"控制"一词有许多技术、法律和通俗的含义,不加仔细限定地使用它可能会混淆而不是澄清。例如,在法律中,"控制"、"实际物理控制"和"控制能力"可以有不同的含义,与工程控制循环关系不大。类似地,(人类)司机"没有控制权"的说法可能无意中错误地暗示人类失去了一切权威。
首选术语"DDT执行"(如上文DDT定义所述)和"操作"(也是上文定义的术语)通过具体描述(人类)驾驶员或驾驶自动化系统在执行部分或全部动态驾驶任务(DDT)方面的实际操作,减少了潜在的混淆。本文件的确使用了术语横向车辆运动控制和纵向车辆运动控制,这两个术语都是根据具体工程功能明确定义的。
如果要在特定的驾驶自动化环境中使用"控制",则应仔细鉴定。为此,使用术语"应首先描述他们实际想要的控制系统:目标、输入、过程和输出,在一定程度上由人类设计师决定以及在一定程度上由人类或无决定权的计算机代理。"参见Smith,B.W。,《机器人法》(2015)中的"工程师和律师应该说相同的机器人语言",可在newlypossible.org上查阅。
3级或3类-有条件驾驶自动化
在常规/正常操作下(见3.27),自动驾驶系统(ADS)持续执行特定操作设计域(ODD)整个动态驾驶任务(DDT),期望DDT支援就绪的用户接受ADS发出的干预请求,以及其他车辆系统中与DDT执行相关的系统故障,并将作出适当的响应。
注1:与1级和2级驾驶员支持功能不同,所有3级和4级ADS功能设计用于在启用中监控和执行操作设计域(ODD)限制条件,并防止超出规定ODD范围外的干预或操作。
注2:DDT后备就绪用户无需在3级ADS启用时对其进行监督,但应准备在ADS发出干预请求时恢复执行动态驾驶任务(DDT),或在故障条件妨碍车辆继续运行时执行应急准备(fallback)并达到最低风险条件。
注3:3级自动驾驶系统(ADS)的DDT后备就绪用户还应接受车辆系统中DDT执行相关的明显系统故障,这些故障不一定触发ADS发出干预请求,例如车身或悬架部件损坏。
注4:如果3级ADS中出现DDT执行相关的系统故障,或ADS退出其操作设计域(ODD),ADS将发出请求,在足够的时间内进行干预,以便支援就绪用户(无论是车内还是远程)做出适当响应。
注5:DDT支援就绪用户对干预请求的"适当"响应可能需要使车辆处于最低风险状态,或在ADS断开后继续操作车辆。
注6:尽管3级ADS功能预计不会有DDT后备性能,但3级功能可能能够在某些有限的条件下执行DTT回退并实现最低风险。
示例:ADS功能能够在低速、高速公路交通拥堵时执行整个动态驾驶任务(DDT)。
5.5
4级或4类-高度驾驶自动化
自动驾驶系统(ADS)持续执行特定ODD内整个动态驾驶任务(DDT)及DDT后备。
注1:用户无需监督4级ADS功能,也不需要在ADS工作中接受干预请求。如果用户未执行动态驾驶任务(DDT),4级ADS能够自动执行DTT后备,也能达到最低的风险条件。这种自动DDT后备和最低风险条件实现能力是4级和3级ADS功能的主要区别。这意味着使用4级ADS功能的车内用户是无需对DDT执行相关系统故障作出响应的乘客。
注2:4级ADS功能可设计为在整个行程中操作车辆(见3.7.3),或设计为仅在给定行程的一部分中操作车辆(见3.7.2),例如,为了完成给定行程,配备有4级ADS功能的车辆的用户在高速公路高速行驶条件下操作车辆时,需要在高速公路结束时执行DDT,以完成其预期行程;然而,如果用户在高速公路结束时未能接管(例如,因为他/她正在睡觉),ADS将自动执行DDT后备并实现最小的风险条件。与3级不同,4级功能用户在ADS工作时不是DDT备用用户(参见下面的示例2),因此不需要响应干预请求以执行后备。然而,如果4级子行程功能达到其ODD限制,ADS可能会向乘客发出警告,提醒其应继续驾驶以完成行程(请注意,在后一种情况下,所说的警报不是干预请求,因为它并不表示需要执行后备。)
示例1: 4级ADS功能能够在代客泊车期间执行整个DDT(即路缘到车门或反之亦然),无需任何驾驶员监督。
示例2:4级ADS功能能够在高速公路上持续运行期间(即在其ODD范围内)执行整个动态驾驶任务(DDT)(注:本例中设想了驾驶员座椅上有一个能够执行DDT的用户,因为驾驶员在进入高速公路之前就必须执行DDT,而在离开高速公路之后也必须执行DDT。因此,这样的功能会提醒用户,他/她应该在驶出ODD前不久恢复对车辆的操作,但如果用户未能响应这样的警报,ADS仍将执行DDT后备,并自动实现最小风险条件。)
示例3:无人驾驶操作调度员可使用4级ADS-DV,该ADS-DV能够在有限的地理区域(如住宅区、军事基地、大学校园)内沿预设路线行驶。
5.6
5级或5类-完全驾驶自动化
ADS无条件持续执行整个DDT和DDT后备(即,非特定ODD)操作。
注1:"无条件/非特定ODD"是指ADS可以在世界任何地方的道路上操作车辆,以及在常规车辆可以由熟练人类驾驶员合理操作的所有道路条件下操作车辆。这意味着,比如,没有经设计的天气,当日时间,及地理限制,何时何地ADS均可以操作车辆。但是,可能存在驾驶员无法控制的情况,在这些情况下,ADS也无法完成给定的行程(例如,暴风雪、道路被淹、眩光冰面等),直到或除非不利条件消除。在出现这种不可管理的情况时,ADS将采取DDT后备应急,以达到最低的风险条件(例如,将车辆停在路边,等待情况发生变化)。
注2:如果发生DDT执行相关系统故障(ADS或车辆),5级ADS自动执行DDT后备,并达到最低风险条件。
注3:用户无需监督5级ADS。
示例:带有ADS的车辆,一旦设置了目的地,就能够在公共道路上的整个行程中操作车辆,而不用考虑起点和终点或干预道路、交通和天气条件。
6、操作设计域(ODD)的重要性
从概念上讲,驾驶自动化系统的作用相对执行部分或全部动态驾驶任务(DDT)的用户而言,与执行功能角色的具体条件具有正交关系。例如,自适应巡航控制(ACC)的具体实现可以仅在高速、低速或全速域下工作。然而,为了简化,这种分类法将这两个轴归为一组驾驶自动化级别。级别1到级别4明确考虑了操作设计域(ODD)的限制。相反,5级(如0级)没有ODD限制(以8.8中的探讨为准)。
因此,准确描述某一功能(0级和5级除外)需要同时明确其驾驶自动化水平和操作设计域(ODD)。如上定义所述,这种驾驶自动化水平和ODD的结合称为使用规范,并且指定功能满足指定的使用规范。
由于ODD可能性范围很广,每个级别可能存在各种各样的可能功能(例如,级别4包括停车、高速、低速、地理围栏等)。因此,与驾驶自动化系统及其用户各自的角色相比,此分类法提供的有关可能定义给定功能的ODD属性的详细信息更少。
ODD对理解为什么一个给定的ADS不是5级仅仅因为它运行ADS专用车辆。与5级自动驾驶系统(ADS)不同,3级或4级ADS操作设计域(ODD)有限。ADS-DV的地理、速度、环境或其他ODD限制可能反映其ADS的技术限制,也可能反映出车辆设计的局限。
1级到4级的功能取决于有限的ODD。这些限制通常反映了驾驶自动化系统的技术能力。例如,在封闭区域运行的4级ADS-DV作为人员搬运工和机场班车已经存在了几十年。这类车辆的ODD非常简单,控制良好,物理封闭(车辆在固定路线上运行;物理屏障防止入侵;免受外部事件、天气等的影响)。这种高度结构化和简单的ODD使得实现4级驾驶自动化在技术上不那么具有挑战性。然而,3级ADS功能在混合交通的开放道路上操作车辆,并且在包括恶劣天气的环境中操作车辆,由于更复杂和非结构化的ODD,在ADS能力方面面临更高的技术门槛(见图11)。
另请注意,对于给定的驾驶自动化系统功能,ODD可能包含一组广泛的参数,这些参数定义了该功能在指定道路环境设计中运行的功能能力限制。它包括范围广泛的变量,如特定道路类型、天气条件、照明条件、地域限制以及是否存在某些道路特征,如车道标线、路侧交通障碍、中央分隔带等。因此,给定的驾驶自动化系统特征只有一个操作设计域(ODD),但此ODD可能是多种多样和多方面的。尽管ODD是由多个变量组成的,但说驾驶自动化功能具有多个ODD是不准确的。只有当所有ODD定义变量满足设计标准时,功能才会按设计运行(见3.26)。图12说明了ODD与驾驶自动化水平的正交性。
图11-相对于驾驶自动化水平的操作设计域(ODD)
图12-相对于驾驶自动化水平的操作设计域(ODD)
7、不推荐使用的术语
为清楚起见,本节确定了本文件中未使用的某些不推荐使用的术语,因为它们在功能上不精确(因此具有误导性)和/或这些术语经常被用于较低水平的驾驶自动化(即1级和2级),其中驾驶自动化系统不执行整个动态驾驶任务(DDT)。
7.1
Autonomous, Driving Modes(s), Self-Driving, Unmanned, Robotic
像上面这样的方言术语有时用于描述驾驶自动化系统和/或配备这些系统的车辆时会出现不一致和混淆。因为自动化是利用电子或机械设备来代替人力,根据牛津英语词典,自动化(通过"驾驶"来提供上下文)是执行部分或全部动态驾驶任务(DDT)的系统的适当术语。使用其他术语会导致混淆、误解和降低可信度。
7.1.1 Autonomous
这个术语在机器人学和人工智能研究界已经使用了很长一段时间,用来表示有能力和有权独立并充分地做出决策的系统。随着时间的推移,这种用法被随意地扩展到不仅包含决策,而且代表整个系统的功能,从而成为自动化(Automated)的同义词。这种用法掩盖了所谓的"自主车辆"是否依赖与外部实体的通信和/或合作来实现重要功能(如数据采集和收集)的问题。如果一些驾驶自动化系统能够独立并充分地执行其所有功能,则它们可能确实是自主的,但是如果它们依赖于与外部实体的通信和/或合作,则应将其视为协作而不是自主的。一些方言用法特别将自动驾驶(Autonomous)与全自动驾驶(5级)联系起来,而其他用法将其应用于所有级别的驾驶自动化,一些州立法将其定义为与3级或以上的任何ADS(或配备此类ADS的任何车辆)大致对应。
此外,在法理学中,自主(autonomy)是指自治的能力。从这个意义上说,"自主"(Autonomous)在应用于自动驾驶技术时也是一个误称,因为即使是最先进的ADS也不是"自治的"。相反,ADS是基于算法运行的,否则就服从用户的命令。
基于这些原因,本文档不使用流行术语"自主"(Autonomous)来描述驾驶自动化。
7.1.2 Driving Mode(s)
在本文件的第一版中,使用术语"驾驶模式"代替"操作设计域(ODD)"。然而,"驾驶模式"是一个不精确的术语,排除了ODD的许多特征条件。基于这些原因,我们建议不要使用"驾驶模式"来描述给定驾驶自动化系统功能的ODD。
7.1.3 Self-Driving
这一术语的含义可能因对驾驶和驾驶员含义的未说明假设而有所不同。它被林林总总地用于指没有驾驶员在场的情况、没有用户正在执行DDT的情况以及驾驶自动化系统正在执行DDT的任何部分的情况。
7.1.4 Unmanned
该术语经常被误用来描述配备2级或更高级别驾驶自动化系统的任何车辆。"无人驾驶"(Unmanned)一词意味着车辆中没有人,这也可能会产生误导,因为它没有区分由遥控驾驶员驾驶的车辆和ADS驾驶的车辆,其中没有乘客有能力操作车辆。
7.1.5 Robotic
这个术语有时被用来指4级或5级驾驶自动化,例如封闭园区ADS-DV或"自动出租车",但在技术上是模糊的,因为任何自动化技术都可以被视为"自动"(Robotic),因此它没有传达有关自动驾驶系统(ADS)或车辆的有用信息。
7.2
Automated or Autonomous Vehicle
本文件建议不要使用将车辆(而不是驾驶)作为自动化对象的术语,因为这样做会导致(人工)驾驶员或ADS和ADS-DVs(ADS专用车辆)操作的车辆之间的混淆,它也未能区分不涉及部分或全部自动执行DDT的其他形式的车辆自动化。
此外,给定的车辆可配备驾驶自动化系统,该系统能够提供在不同级别上操作的多个驾驶自动化功能;因此,在任何给定实例中展示的驾驶自动化水平由所涉及的功能决定。
因此,用于描述具有驾驶自动化能力的车辆的推荐用法是"配备驾驶自动化系统的车辆的1级或2级"或配备ADS的车辆的"3级、4级,或5级] "。"用于描述配备有启用系统的车辆(与仅可用的系统相比)的推荐用法为"1级或2级驾驶自动化系统启用车辆"或"3级、4级或5级ADS操作车辆"
7.2
Control
在口语中,术语"控制"有时用于描述(人类)驾驶员或驾驶自动化系统的各自角色(例如,"驾驶员具有控制权")。本文件的作者们强烈反对,因此特意避免,这种潜在的问题口语用法。由于"控制"一词有许多技术、法律和通俗的含义,不加仔细限定地使用它可能会混淆而不是澄清。例如,在法律中,"控制"、"实际物理控制"和"控制能力"可以有不同的含义,与工程控制循环关系不大。类似地,(人类)司机"没有控制权"的说法可能无意中错误地暗示人类失去了一切权威。
首选术语"DDT执行"(如上文DDT定义所述)和"操作"(也是上文定义的术语)通过具体描述(人类)驾驶员或驾驶自动化系统在执行部分或全部动态驾驶任务(DDT)方面的实际操作,减少了潜在的混淆。本文件的确使用了术语横向车辆运动控制和纵向车辆运动控制,这两个术语都是根据具体工程功能明确定义的。
如果要在特定的驾驶自动化环境中使用"控制",则应仔细鉴定。为此,使用术语"应首先描述他们实际想要的控制系统:目标、输入、过程和输出,在一定程度上由人类设计师决定以及在一定程度上由人类或无决定权的计算机代理。"参见Smith,B.W。,《机器人法》(2015)中的"工程师和律师应该说相同的机器人语言",可在newlypossible.org上查阅。



编辑推荐




最新资讯
-
中汽中心工程院能量流测试设备上线全新专家
2025-04-03 08:46
-
上新|AutoHawk Extreme 横空出世-新一代实
2025-04-03 08:42
-
「智能座椅」东风日产N7为何敢称“百万级大
2025-04-03 08:31
-
基于加速度计补偿的俯仰角和路面坡度角估计
2025-04-03 08:30
-
《北京市自动驾驶汽车条例》正式实施 L3级
2025-04-02 20:23
