




 广告
广告





















































基于CAN总线的插电混动汽车电子电气架构的研究
2021-05-25 16:16:38· 来源:海马汽车有限公司 作者:王东立、张会文、甘自学、曹中成、尹冬至、蒋锋

伴随着汽车电子技术的飞速发展,CAN网络总线架构复杂度日益增加,以满足人们对汽车安全性、舒适性、娱乐性的不断需求,而伴随着插电混合动力车型的研发,新能源
伴随着汽车电子技术的飞速发展,CAN网络总线架构复杂度日益增加,以满足人们对汽车安全性、舒适性、娱乐性的不断需求,而伴随着插电混合动力车型的研发,新能源系统架构的加入使得整车CAN网络总线架构复杂度成几何级上升,从而对汽车电器通信的实时性和可靠性提出巨大的挑战。
目前许多传统车型已经配置了诸如EMS(发动机管理系统)、TCU(变速器控制单元)、ESC(电子稳定控制单元)、ACU(安全气囊控制单元)、EPB(电子驻车制动系统)、EPS(电子助力转向系统)、PAS(泊车辅助系统)、MMI(多媒体交互系统)、T—BOX(远程信息处理控制器)、BCM(车身控制模块)等控制节点,然新能源系统的加入又增加了BMS(电池管理系统)、DC—Dc(Dc—Dc转换控制器)、HCU(混动控制单元)、MCU(电机控制单元)、OBC(车载充电机)等控制节点。
对于如此繁多的控制节点,普通的的单路串行通讯总线(如图1所示)已无法满足系统的通讯需求。
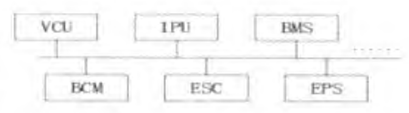
图1 单路串行总线
因此, 针对国内某国产车型设计了一类新颖的基于独立网关的总线架构(如图2),解决了插电混合动力汽车各控制模块的实时通信难题。
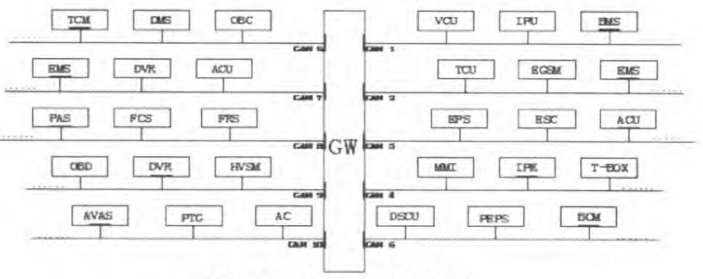
图2 基于独立网关的总线架构
2. 整车电子电气架构
概述本文研究了基于独立网关的CAN总线的某混动车型电子电气架构系统设计,通过对该混动车型设计任务书、配置表、功能矩阵及功能规范等技术文件进行分析后,发现有30多个控制节点,则传统的单路串行通讯总线已无法满足该型混动车型各控制节点信息交互的需求,若采用多路CAN通讯总线通过独立网关连接的网络架构,不仅可以满足该型混动车型诸多控制节点信息交互需求,还具备该车型后续的新功能扩展能力。
3. 系统通信设计
为了实现整车电子电气功能,需进行CAN总线的系统设计。图2基于独立网关的总线架构由整车功能矩阵分配至系统级功能矩阵,再分配至单个控制节点的功能列表,通过对单个控制节点功能列表的分析,即可得出单个节点的通信矩阵,进而再分析所有节点形成整车的通信矩阵,最后进行系统仿真。
3.1 整车网络架构设计
单路CAN总线的通信速率一般为125kbit/s一1Mbit/s,为了保证各路CAN线上控制节点信号采集的实时性和有效性,综合考虑,各路CAN总线速率均采用500kbit/s。
为了保证总线通信的可靠性,需在各路总线的最近段(网关)与最远端的控制节点上加装终端电阻(典型值120Ω),能够起到消除通信电路中信号的反射,降低信号失真的风险。该系统的网络拓扑如图3所示,根据整车上各控制器布置的位置,设置了各路CAN总线的终端电阻。
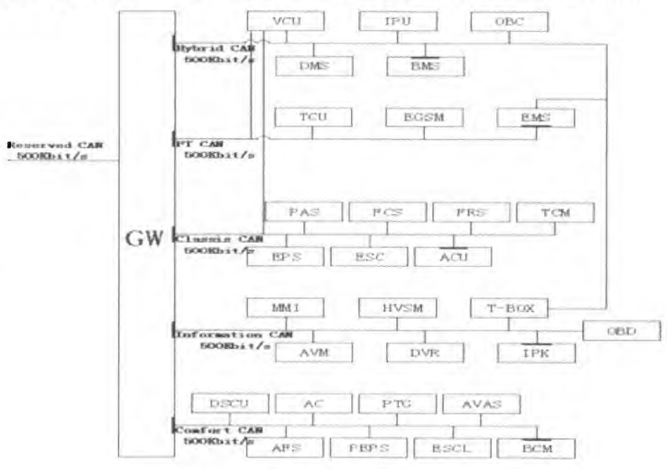
图3系统网络架构拓扑图
3.2 整车通信矩阵设计
根据IS01 1898的定义,总线上的CAN信号通过固定的报文形式进行传输,报文帧格式共有两种类型,以标识符的长度的不同进行区分,即标准帧和扩展帧。标准帧的标识符长度有11位,扩展帧的标识符长度有29位,在本系统中采用标准帧。报文帧有四种不同的类型,即数据帧、远程帧、错误帧和超载帧。
数据帧是将要发送的数据,从发送器传送到各个接收器。远程帧,是一种接收单元向具有相同标识符的节点请求数据的帧,也称之为遥控帧。错误帧,是总线上任何节点在检测到总线错误时向其他单元通知错误的帧。超载帧,是接收单元通知其尚未做好接收准备的帧。
3.2.1 CAN总线报文数据帧设计
本系统设计的目的即为实现各控制节点之间数据的实时传递,报文帧格式采用数据帧。数据帧由7个不同的位场组成:帧起始、仲裁场、控制场、数据场、CRC场、应答场(ACK)和帧结尾。标准数据帧格式示意图如图4所示。
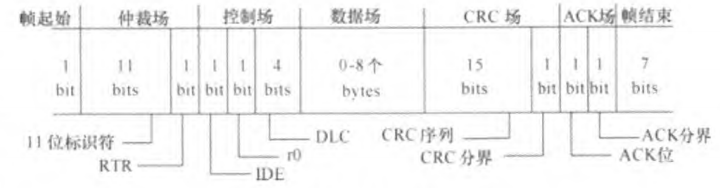
图4标准数据帧格式示意图
帧起始标志数据帧的开始,仅有一个显性位组成。仲裁场由11位的标识符以及远程发送请求RTR(Substitute Remote Request)组成,其定义了该数据帧的优先级。RTR在数据帧中为显性,而在远程帧中为隐性。
控制场由IDE位,保留位r0,数据长度DLC(data length code)组成。数据场包含了该数据帧需发送的有效数据,它可以为 图4标准数据帧格式示意图0~8个字节,每字节有8位。
CRC场包括CRC序列(CRC Sequence)和CRC界定符(CRC Delimiter),起到校验帧传输正确与否的作用。应答场长度为2个位,包含应答间隙(ACK Slot)和应答界定符(ACK Delimiter),用于确定报文是否被其他节点正确接收。帧结束表示该数据帧的结束。
3.2.2 以IPU(电机控制器)为例的传输信号设计
标准帧的数据场定义为8个字节,每个字节有8个位。下面以MCU(电机控制器)为例进行具体信号的设计。首先对MCU需要发送的信号进行分析。根据功能定义,IPU(电机控制器)需要发出电机的转速信号、电机的温度信号、报警信息。信号分为物理量和状态量两种。
其中电机转速信号和温度信号为物理量,需根据传感器实际采集值进行实时变化。报警信息是状态量,有错误和正常两种状态。信号需按表1中内容进行定义。
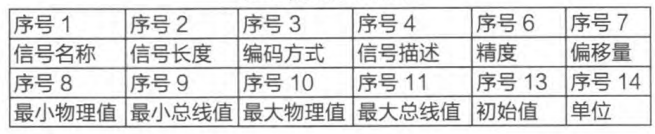
信号名称包含该信号的发送方和英文简称,固定周期为该信号的固定发送周期,信号长度定义了该信号的数据长度,信号描述为该信号内所包含各数字段的中文解释,编码方式说明了该信号每个数字段的定义,单位则是定义每个数字段所表示量的单位(物理量即为所表示量的单位,状态量单位默认为为bit)。
每个信号的总线值与实际物理值的转换关系为:物理量=精度X总线值+偏移量 (1)
其中,精度受信号采集传感器的约束。偏移量为系统设置的补偿量,可通过标定达到适配值。通过将MCU所发送的信号进行上述分析,一帧报文即可完成所有信号的发送。
以此类推,对单个节点完成分析后,再完成所有节点的分析,即可形成整车的CAN通讯矩阵,最后根据每个报文的优先级分配唯一的ID(信息标识符),ID越小即代表该条报文具有更高的发送优先级。
3.3 CAN网络负载率理论计算
在CAN总线通信过程中,负载率是衡量通信质量的重要过程指标。其定义为1s内网络总线上所有传输数据所占带宽的百分率,其理论计算方法如下:
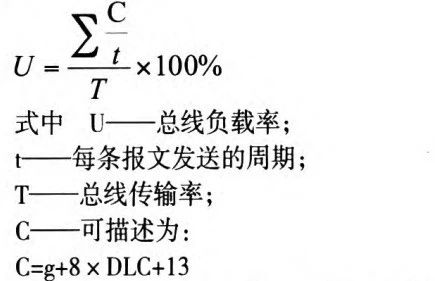
其中,DLC为报文长度,g为CAN报文中控制位的总位数(标准帧为34,扩展帧为54),13为无位填充段(10)+帧间间隔(3)。
通过上述公式计算,5路CAN线的负载率分别为:
Hybrid CAN 25%,PT CAN 22%
Chassis CAN 24%,Comfort CAN 13%
InformationCAN 7%。
另考虑到真实网络在恶略情况下可能比理论计算值高出10%,则各路CAN线负载率预估值为:
Hybrid CAN 28%,PT CAN 24%
Chassis CAN 26%,Comfort CAN 14%
InformationCAN 8%。
通过计算,各路CAN线负载率均低于标准安全阀值30%,且节点数均低于10个,完全符合系统设计要求。
目前许多传统车型已经配置了诸如EMS(发动机管理系统)、TCU(变速器控制单元)、ESC(电子稳定控制单元)、ACU(安全气囊控制单元)、EPB(电子驻车制动系统)、EPS(电子助力转向系统)、PAS(泊车辅助系统)、MMI(多媒体交互系统)、T—BOX(远程信息处理控制器)、BCM(车身控制模块)等控制节点,然新能源系统的加入又增加了BMS(电池管理系统)、DC—Dc(Dc—Dc转换控制器)、HCU(混动控制单元)、MCU(电机控制单元)、OBC(车载充电机)等控制节点。
对于如此繁多的控制节点,普通的的单路串行通讯总线(如图1所示)已无法满足系统的通讯需求。
图1 单路串行总线
因此, 针对国内某国产车型设计了一类新颖的基于独立网关的总线架构(如图2),解决了插电混合动力汽车各控制模块的实时通信难题。
图2 基于独立网关的总线架构
2. 整车电子电气架构
概述本文研究了基于独立网关的CAN总线的某混动车型电子电气架构系统设计,通过对该混动车型设计任务书、配置表、功能矩阵及功能规范等技术文件进行分析后,发现有30多个控制节点,则传统的单路串行通讯总线已无法满足该型混动车型各控制节点信息交互的需求,若采用多路CAN通讯总线通过独立网关连接的网络架构,不仅可以满足该型混动车型诸多控制节点信息交互需求,还具备该车型后续的新功能扩展能力。
3. 系统通信设计
为了实现整车电子电气功能,需进行CAN总线的系统设计。图2基于独立网关的总线架构由整车功能矩阵分配至系统级功能矩阵,再分配至单个控制节点的功能列表,通过对单个控制节点功能列表的分析,即可得出单个节点的通信矩阵,进而再分析所有节点形成整车的通信矩阵,最后进行系统仿真。
3.1 整车网络架构设计
单路CAN总线的通信速率一般为125kbit/s一1Mbit/s,为了保证各路CAN线上控制节点信号采集的实时性和有效性,综合考虑,各路CAN总线速率均采用500kbit/s。
为了保证总线通信的可靠性,需在各路总线的最近段(网关)与最远端的控制节点上加装终端电阻(典型值120Ω),能够起到消除通信电路中信号的反射,降低信号失真的风险。该系统的网络拓扑如图3所示,根据整车上各控制器布置的位置,设置了各路CAN总线的终端电阻。
图3系统网络架构拓扑图
3.2 整车通信矩阵设计
根据IS01 1898的定义,总线上的CAN信号通过固定的报文形式进行传输,报文帧格式共有两种类型,以标识符的长度的不同进行区分,即标准帧和扩展帧。标准帧的标识符长度有11位,扩展帧的标识符长度有29位,在本系统中采用标准帧。报文帧有四种不同的类型,即数据帧、远程帧、错误帧和超载帧。
数据帧是将要发送的数据,从发送器传送到各个接收器。远程帧,是一种接收单元向具有相同标识符的节点请求数据的帧,也称之为遥控帧。错误帧,是总线上任何节点在检测到总线错误时向其他单元通知错误的帧。超载帧,是接收单元通知其尚未做好接收准备的帧。
3.2.1 CAN总线报文数据帧设计
本系统设计的目的即为实现各控制节点之间数据的实时传递,报文帧格式采用数据帧。数据帧由7个不同的位场组成:帧起始、仲裁场、控制场、数据场、CRC场、应答场(ACK)和帧结尾。标准数据帧格式示意图如图4所示。
图4标准数据帧格式示意图
帧起始标志数据帧的开始,仅有一个显性位组成。仲裁场由11位的标识符以及远程发送请求RTR(Substitute Remote Request)组成,其定义了该数据帧的优先级。RTR在数据帧中为显性,而在远程帧中为隐性。
控制场由IDE位,保留位r0,数据长度DLC(data length code)组成。数据场包含了该数据帧需发送的有效数据,它可以为 图4标准数据帧格式示意图0~8个字节,每字节有8位。
CRC场包括CRC序列(CRC Sequence)和CRC界定符(CRC Delimiter),起到校验帧传输正确与否的作用。应答场长度为2个位,包含应答间隙(ACK Slot)和应答界定符(ACK Delimiter),用于确定报文是否被其他节点正确接收。帧结束表示该数据帧的结束。
3.2.2 以IPU(电机控制器)为例的传输信号设计
标准帧的数据场定义为8个字节,每个字节有8个位。下面以MCU(电机控制器)为例进行具体信号的设计。首先对MCU需要发送的信号进行分析。根据功能定义,IPU(电机控制器)需要发出电机的转速信号、电机的温度信号、报警信息。信号分为物理量和状态量两种。
其中电机转速信号和温度信号为物理量,需根据传感器实际采集值进行实时变化。报警信息是状态量,有错误和正常两种状态。信号需按表1中内容进行定义。
信号名称包含该信号的发送方和英文简称,固定周期为该信号的固定发送周期,信号长度定义了该信号的数据长度,信号描述为该信号内所包含各数字段的中文解释,编码方式说明了该信号每个数字段的定义,单位则是定义每个数字段所表示量的单位(物理量即为所表示量的单位,状态量单位默认为为bit)。
每个信号的总线值与实际物理值的转换关系为:物理量=精度X总线值+偏移量 (1)
其中,精度受信号采集传感器的约束。偏移量为系统设置的补偿量,可通过标定达到适配值。通过将MCU所发送的信号进行上述分析,一帧报文即可完成所有信号的发送。
以此类推,对单个节点完成分析后,再完成所有节点的分析,即可形成整车的CAN通讯矩阵,最后根据每个报文的优先级分配唯一的ID(信息标识符),ID越小即代表该条报文具有更高的发送优先级。
3.3 CAN网络负载率理论计算
在CAN总线通信过程中,负载率是衡量通信质量的重要过程指标。其定义为1s内网络总线上所有传输数据所占带宽的百分率,其理论计算方法如下:
其中,DLC为报文长度,g为CAN报文中控制位的总位数(标准帧为34,扩展帧为54),13为无位填充段(10)+帧间间隔(3)。
通过上述公式计算,5路CAN线的负载率分别为:
Hybrid CAN 25%,PT CAN 22%
Chassis CAN 24%,Comfort CAN 13%
InformationCAN 7%。
另考虑到真实网络在恶略情况下可能比理论计算值高出10%,则各路CAN线负载率预估值为:
Hybrid CAN 28%,PT CAN 24%
Chassis CAN 26%,Comfort CAN 14%
InformationCAN 8%。
通过计算,各路CAN线负载率均低于标准安全阀值30%,且节点数均低于10个,完全符合系统设计要求。



编辑推荐




最新资讯
-
大卓智能端到端直播实测,16公里复杂路段挑
2025-04-25 17:16
-
《汽车轮胎耐撞击性能试验方法-车辆法》等
2025-04-25 11:45
-
“真实”而精确的能量流测试:电动汽车能效
2025-04-25 11:44
-
GRAS助力中国高校科研升级
2025-04-25 10:25
-
梅赛德斯-AMG使用VI-CarRealTime开发其控制
2025-04-25 10:21
