




 广告
广告





















































安全行车保障员——AEB系统性能仿真测试浅析
2021-06-01 16:17:22· 来源:上汽安全与CAE技术

前言自动紧急制动(Autonomous Emergency Braking,AEB)系统,其功能是通过摄像头或雷达检测和识别前方车辆或行人,在有碰撞可能的情况下先用声音和警示灯提醒驾
· 前言
自动紧急制动(Autonomous Emergency Braking,AEB)系统,其功能是通过摄像头或雷达检测和识别前方车辆或行人,在有碰撞可能的情况下先用声音和警示灯提醒驾驶员进行制动以避免碰撞。若在系统发出报警后,驾驶员仍无制动行为,系统判断靠正常操作已无法避免碰撞时,会采取自动制动的措施来减轻或避免碰撞。同时,AEB系统还具有动态制动支持功能,当驾驶员踩下制动踏板的力量不足以避免即将到来的碰撞时,系统会为其补充制动力。该系统可有效保护车内乘员和车外道路使用者的安全,近年来已成为继ESP之后,汽车安全领域另一重要配置。

· AEB相关法规介绍
早在2012年,欧盟就出台规定要求2014年以后生产的新车必须配备AEB系统。2014年初,EuroNCAP正式将AEB纳入评分体系,没有配备AEB系统的车型无法获得五星评价。另外,CNCAP也已经将AEB系统纳入星级评价体系,且占据相当高的比重。

EuroNCAP测试AEB系统的场景包括车对车(CCR)和车对弱势道路使用者(VRU),车对车场景主要包括目标车静止(CCRs)、运动(CCRm)和制动(CCRb),车对弱势道路使用者场景主要包括车对行人和自行车等。上汽为保证车辆AEB功能开发质量,建立了一套从虚拟仿真到实车测试验证的体系,从而为NCAP星级评价保驾护航。
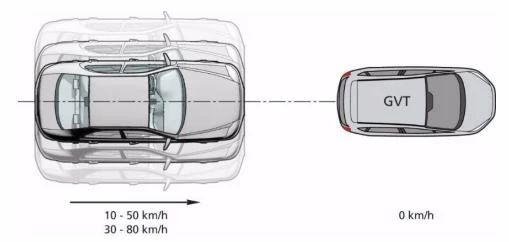
CCRs场景
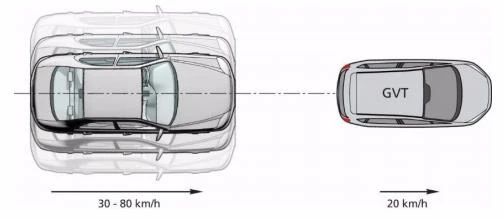
CCRm场景
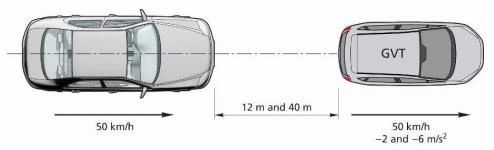
CCRb场景
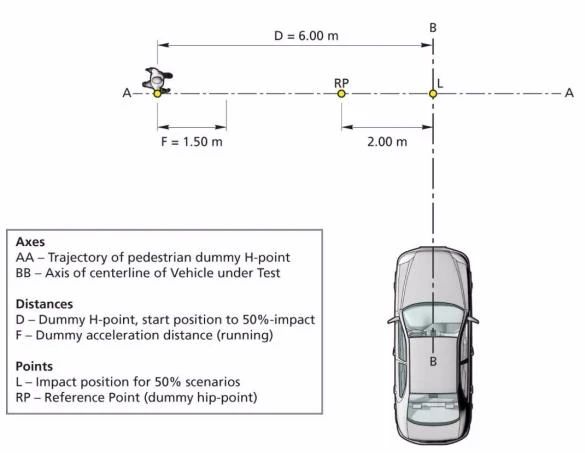
车对行人场景示意
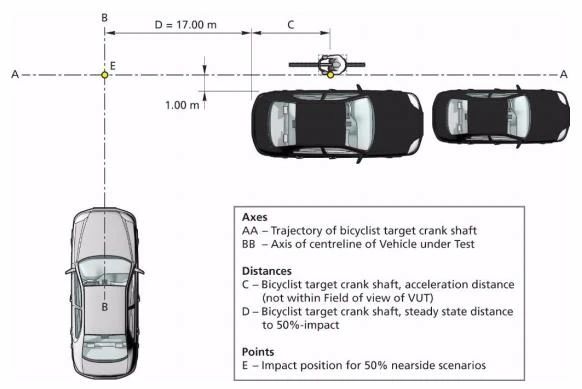
车对自行车场景示意
· 仿真测试AEB性能
接下来简单介绍NCAP场景下仿真测试AEB系统性能的技术方案,仿真工具链路的方案主要由Prescan提供包括目标物信息的仿真场景,Carsim提供整车动力学模型,Matlab提供算法模型及联合仿真接口。

AEB系统仿真工具链路
首先,基于NCAP测试AEB性能的工况,在Prescan中建立测试场景,包括道路、障碍物、被测车辆、目标车辆、雷达/摄像头传感器等。场景建立后效果如下图。场景模型经过编译后,可形成被Simulink识别的模块。
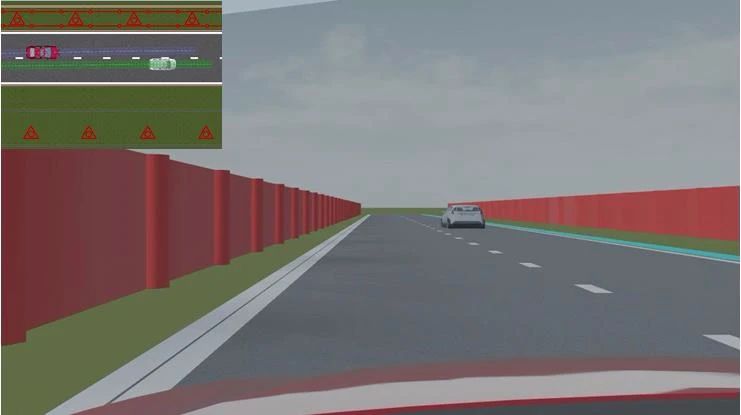
Prescan测试场景示意
然后,根据整车状态,统计整理车辆尺寸,收集车辆制动系统、转向系统、悬架系统等的设计参数,并将其输入至Carsim,以建立精确的车辆动力学模型。配置好AEB系统相关的输入输出变量如车速、制动力等后,将Carsim模块发送至Simulink模型,即可实现与Simulink的联合交互。
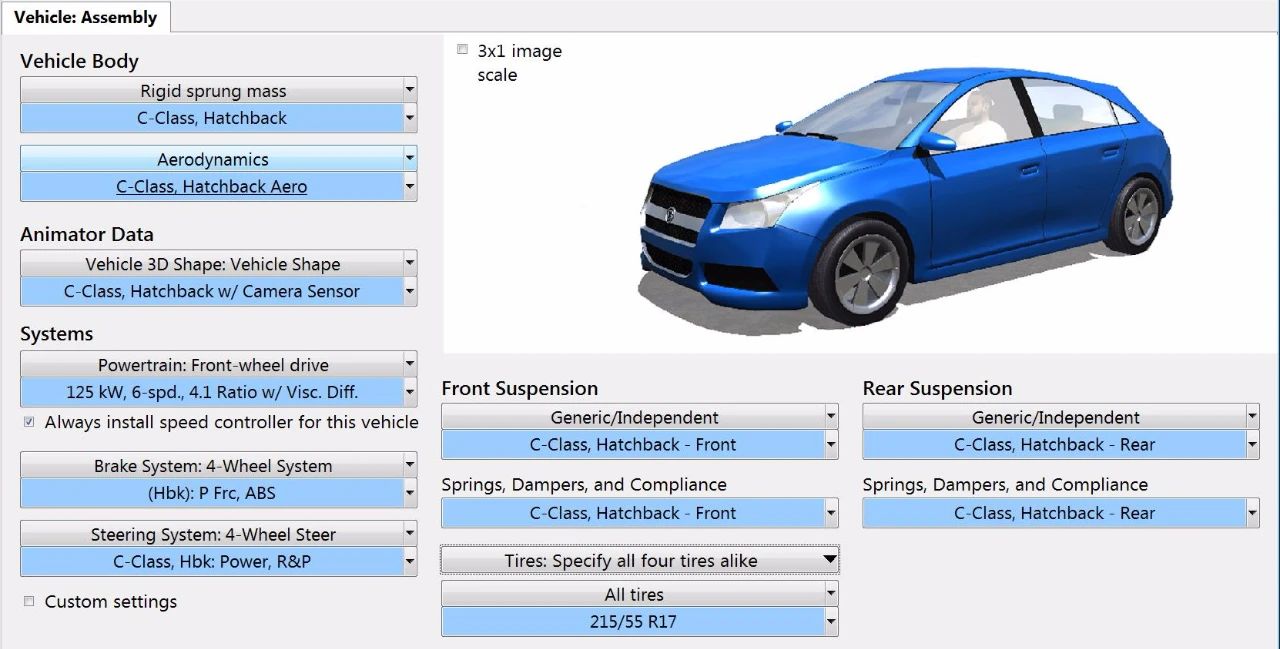
Carsim车辆参数界面
Prescan和Carsim的设置工作完成后,在Matlab中搭建AEB控制算法模型,可采用与实车开发策略相同的算法判断碰撞风险,以此控制车辆AEB系统介入的时机和程度。
以上工作完成后,即可对AEB系统在不同的场景下的性能进行仿真测试。比如设置目标车以20kph的速度行驶,被测车辆以50kph的速度接近目标车辆。当AEB算法识别到碰撞风险后,会主动进行制动操作。被测车辆刹停或发生碰撞后,可根据AEB系统介入时机、制动距离、碰撞速度等参数来判断AEB算法参数的准确性,以此来指导系统的性能开发。由于在相同场景下可以用不同的车速匹配不同的控制算法参数,形成测试矩阵,产生的测试工况较多。可采用自动化测试的方式,并在测试结果中标明关键参数,出具仿真测试报告。
· 小结
通过项目的积累,AEB系统仿真测试的准确性已得到大幅度提升,且经过和实车测试结果对比,二者的差异已越来越小。上汽的AEB功能经过仿真和实际测试的不断优化迭代,可有效保障行车安全,成为名副其实的安全行车保障员。
自动紧急制动(Autonomous Emergency Braking,AEB)系统,其功能是通过摄像头或雷达检测和识别前方车辆或行人,在有碰撞可能的情况下先用声音和警示灯提醒驾驶员进行制动以避免碰撞。若在系统发出报警后,驾驶员仍无制动行为,系统判断靠正常操作已无法避免碰撞时,会采取自动制动的措施来减轻或避免碰撞。同时,AEB系统还具有动态制动支持功能,当驾驶员踩下制动踏板的力量不足以避免即将到来的碰撞时,系统会为其补充制动力。该系统可有效保护车内乘员和车外道路使用者的安全,近年来已成为继ESP之后,汽车安全领域另一重要配置。
· AEB相关法规介绍
早在2012年,欧盟就出台规定要求2014年以后生产的新车必须配备AEB系统。2014年初,EuroNCAP正式将AEB纳入评分体系,没有配备AEB系统的车型无法获得五星评价。另外,CNCAP也已经将AEB系统纳入星级评价体系,且占据相当高的比重。
EuroNCAP测试AEB系统的场景包括车对车(CCR)和车对弱势道路使用者(VRU),车对车场景主要包括目标车静止(CCRs)、运动(CCRm)和制动(CCRb),车对弱势道路使用者场景主要包括车对行人和自行车等。上汽为保证车辆AEB功能开发质量,建立了一套从虚拟仿真到实车测试验证的体系,从而为NCAP星级评价保驾护航。
CCRs场景
CCRm场景
CCRb场景
车对行人场景示意
车对自行车场景示意
· 仿真测试AEB性能
接下来简单介绍NCAP场景下仿真测试AEB系统性能的技术方案,仿真工具链路的方案主要由Prescan提供包括目标物信息的仿真场景,Carsim提供整车动力学模型,Matlab提供算法模型及联合仿真接口。
AEB系统仿真工具链路
首先,基于NCAP测试AEB性能的工况,在Prescan中建立测试场景,包括道路、障碍物、被测车辆、目标车辆、雷达/摄像头传感器等。场景建立后效果如下图。场景模型经过编译后,可形成被Simulink识别的模块。
Prescan测试场景示意
然后,根据整车状态,统计整理车辆尺寸,收集车辆制动系统、转向系统、悬架系统等的设计参数,并将其输入至Carsim,以建立精确的车辆动力学模型。配置好AEB系统相关的输入输出变量如车速、制动力等后,将Carsim模块发送至Simulink模型,即可实现与Simulink的联合交互。
Carsim车辆参数界面
Prescan和Carsim的设置工作完成后,在Matlab中搭建AEB控制算法模型,可采用与实车开发策略相同的算法判断碰撞风险,以此控制车辆AEB系统介入的时机和程度。
以上工作完成后,即可对AEB系统在不同的场景下的性能进行仿真测试。比如设置目标车以20kph的速度行驶,被测车辆以50kph的速度接近目标车辆。当AEB算法识别到碰撞风险后,会主动进行制动操作。被测车辆刹停或发生碰撞后,可根据AEB系统介入时机、制动距离、碰撞速度等参数来判断AEB算法参数的准确性,以此来指导系统的性能开发。由于在相同场景下可以用不同的车速匹配不同的控制算法参数,形成测试矩阵,产生的测试工况较多。可采用自动化测试的方式,并在测试结果中标明关键参数,出具仿真测试报告。
· 小结
通过项目的积累,AEB系统仿真测试的准确性已得到大幅度提升,且经过和实车测试结果对比,二者的差异已越来越小。上汽的AEB功能经过仿真和实际测试的不断优化迭代,可有效保障行车安全,成为名副其实的安全行车保障员。







最新资讯
-
大卓智能端到端直播实测,16公里复杂路段挑
2025-04-25 17:16
-
《汽车轮胎耐撞击性能试验方法-车辆法》等
2025-04-25 11:45
-
“真实”而精确的能量流测试:电动汽车能效
2025-04-25 11:44
-
GRAS助力中国高校科研升级
2025-04-25 10:25
-
梅赛德斯-AMG使用VI-CarRealTime开发其控制
2025-04-25 10:21
