




 广告
广告





















































激光雷达的探测范围是越越好吗?
2021-06-03 15:36:57· 来源:Forbes 作者:朱 琳

撰文 / 朱 琳编辑 / 钱亚光设计 / 师瑜超来源 / Forbes,作者:Sabbir Rangwala激光雷达之战正在升温。这并不奇怪,因为在过去6个月里有6家公司上市,通过SPAC(
撰文 / 朱 琳
编辑 / 钱亚光
设计 / 师瑜超
来源 / Forbes,作者:Sabbir Rangwala
激光雷达之战正在升温。这并不奇怪,因为在过去6个月里有6家公司上市,通过SPAC(特殊目的收购公司)合并成为激光雷达界的独角兽。
数十亿美元的估值,报告季度亏损的压力,以及提高股价的需要,基本上导致了一场激光雷达的探测范围之战。具体来说,指的是激光雷达能“看到”和识别多远的汽车、行人、动物、障碍区、道路碎片等。
出于人眼安全的考虑限制了8XX-9XX纳米的激光雷达,使之比14XX-15XX纳米激光雷达的范围更小。后者可以使用更高的激光功率,因为人类的角膜会吸收这个波长的光,从而限制对视网膜的损伤。
更高的波长是昂贵的(相对于8XX-9XX纳米的系统来说是2-3倍)。以这些波长操作的公司需要证明更高成本的激光雷达是合理的,而测距性能似乎是目前的一个重要论据。
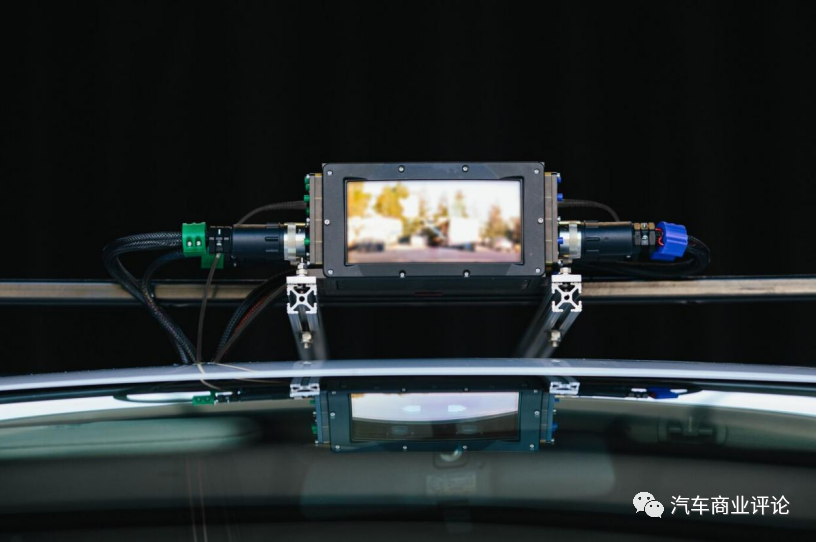
普林斯顿光波公司和Luminar公司率先宣布并展示了他们的15XX纳米激光雷达,对于汽车的探测范围在200-300米。
Luminar公司生产的激光雷达▼
Aeva最近宣布,他们的15XX纳米调频连续波(FMCW)激光雷达可以在500米处探测汽车,在350米处探测行人。在此之前,Aeye宣传说探测汽车的范围是1000米。
Argo也不甘示弱,最近宣布其在>1400纳米波长下工作的盖革模式激光雷达的探测范围为400米(Argo在2017年收购了普林斯顿光波公司)。
Argo声称,其激光雷达可以在夜间检测到反射率为1%的汽车(夜间的说法具有迷惑性,因为对于盖革模式来说,更具挑战性的情况是在明亮的阳光下)。目前还不清楚在明亮的阳光下,1%反射率的物体是否可以达到400米的范围(这将是相当具有突破性的!),以及在这些条件下,除了检测之外,物体识别是否也可以实现。
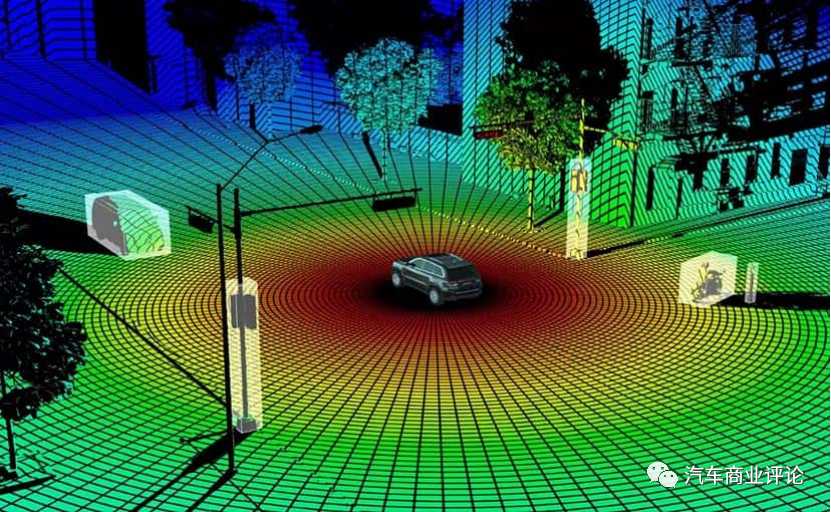
激光雷达传感器使用激光脉冲来渲染汽车周围环境的精确图像▼
激光雷达的探测距离对L4自动驾驶汽车很重要,但规格方面存在细微差别。对于安全至关重要的障碍物规避,自动驾驶汽车感知引擎需要在足够的时间内识别道路危险,以便进行安全操作,如刹车以避开轮胎碎片。
重要的是特定物体反射率的范围(10%似乎是一个合理的标准)和危险识别的高置信水平(> 99%,否则,误报率将非常高,导致不断刹车,导致乘客不适和投诉)。
值得注意的是,检测(“那里有东西,但我们不知道它是什么”)和识别(“那里是一辆抛锚的汽车或一个行人”)之间是有区别的。人们常常给出的是与检测相关的范围数字,这通常是不可行的。识别是一个更困难的问题,它依赖于分辨率和实时图像处理的准确性。
自动驾驶汽车利用传感器、感知引擎和人工智能来实施五种基本控制动作:刹车、转向、加速、减速或停车。到目前为止,最关键的、对时间/安全敏感的动作是在出现障碍时刹车。
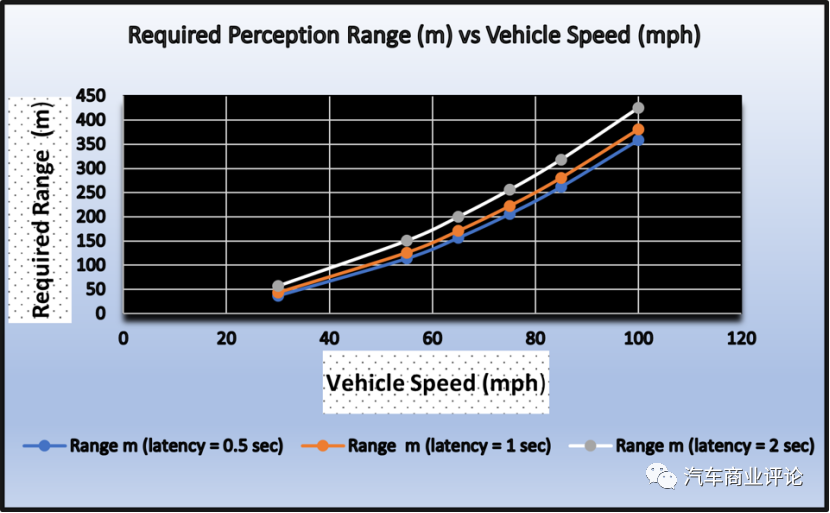
刹车距离(将速度降至零所需的距离)是初始车速和安全/舒适的减速(通常为0.3g或约3m/s²)的函数。所需的感知范围是车辆速度和延迟时间的函数。
延迟时间是指获取原始传感器数据和应用安全动作(在本例中是刹车)之间的时间间隔,因为在此期间车辆仍在继续移动,因此延迟时间会影响所需的感知范围。较高的延迟时间要求较低的车速或较高的范围。图1显示了这三个量之间的关系。
图1:避障所需感知范围(0.3g制动)▼
多大的范围是足够的,承诺更高的范围有什么影响?在不久的将来(5-10年),L4车辆在高速公路上的运行速度不可能超过96-112公里/时。在这些速度下,大约200-250米的范围似乎是足够的。
重型卡车在制动时需要更低的减速水平、更高的范围。然而,较低的速度(88-96公里/时)确保200-250米的范围是足够的。
天气是另一个需要考虑的因素——恶劣天气下的减速水平较低,但车辆速度也较低,这使得200-250米的范围成为一个合理的操作目标。
获得更高的目标识别范围是昂贵的,因为需要消耗更多的激光雷达资源(激光功率、更灵敏的探测、更高的功耗等)。
有一些争论是关于提高极限的,比如增加安全边际和特定的用例(例如,糟糕的道路、恶劣的天气等)。但是使用这个性能指标的缺点是,在对象分辨率等其他参数方面有所妥协,如图2所示。
图2:随着范围的增加,目标分辨率下降▼
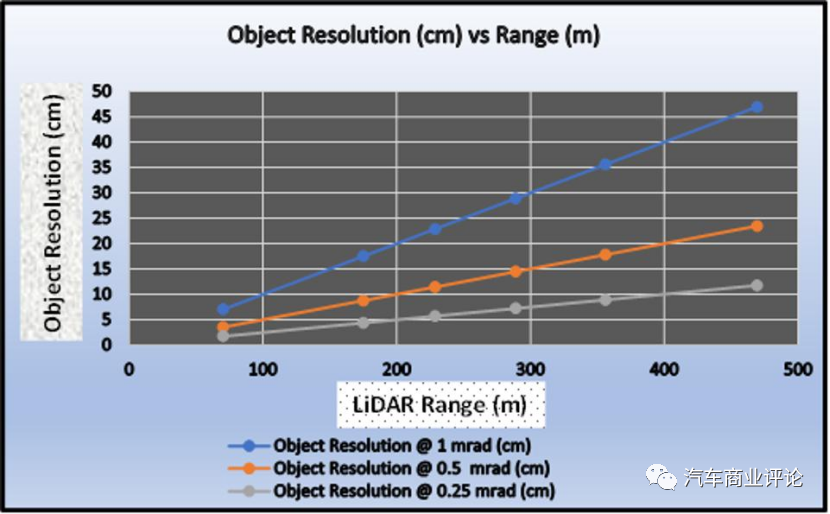
对象分辨率决定了识别的置信度,这对自动驾驶汽车的感知和控制行动至关重要。检测和识别轮胎碎片或一块砖头(通常为15厘米)通常需要8厘米的分辨率(至少需要2个像素来识别,3个像素则是理想的)。
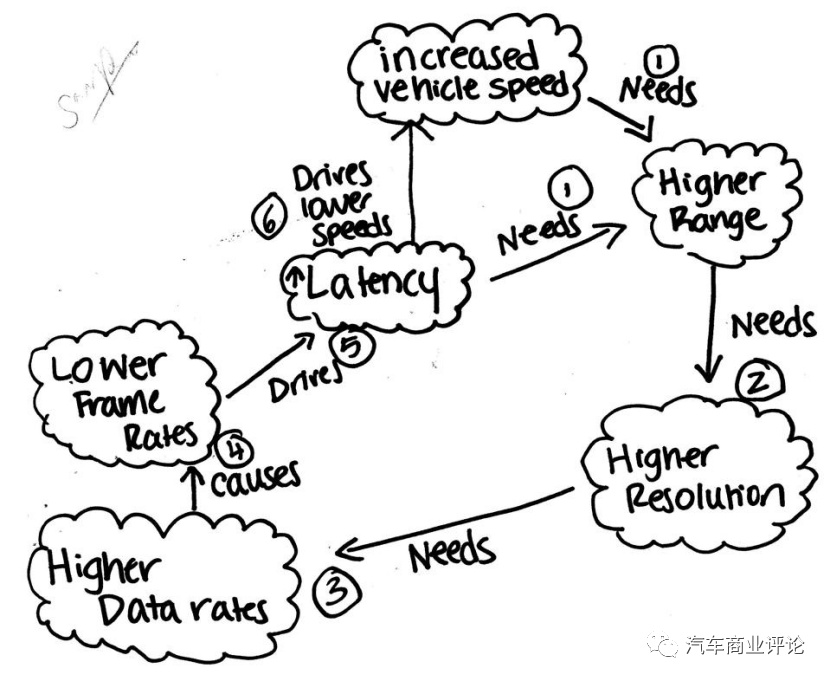
将范围从200米翻倍到400米,需要将角分辨率从0.5 mrad提高到0.25 mrad,使原始数据量和计算带宽增加2倍。这导致了更高的光学和计算成本。它还会增加了延迟时间,需要更高的感知范围或降低车速(见图1)。希望图3能更清楚地阐述这种循环性。
图3:范围-分辨率-速率难题:1)高速和延迟需要更高的范围,2)需要更高的分辨率,3)更高的分辨率导致更高的数据速率以及,4)较低的帧速率,从而产生,5)更高的延迟和,6)更低的速度▼
承诺越来越高的探测范围并不是卓越激光雷达的秘诀。需要考虑使用情况和相互关联的系统规格,如分辨率、帧率和延迟。
必须澄清的是实现更远范围的确切条件和定义(反射率、置信度、延迟、照明条件、角分辨率等),并且需要明确说明在这个范围内实现的感知功能(检测、识别、鉴别)。
随着激光雷达成为关键的安全传感器,它们需要在普遍接受的标准和规格方面成熟起来。
编辑 / 钱亚光
设计 / 师瑜超
来源 / Forbes,作者:Sabbir Rangwala
激光雷达之战正在升温。这并不奇怪,因为在过去6个月里有6家公司上市,通过SPAC(特殊目的收购公司)合并成为激光雷达界的独角兽。
数十亿美元的估值,报告季度亏损的压力,以及提高股价的需要,基本上导致了一场激光雷达的探测范围之战。具体来说,指的是激光雷达能“看到”和识别多远的汽车、行人、动物、障碍区、道路碎片等。
出于人眼安全的考虑限制了8XX-9XX纳米的激光雷达,使之比14XX-15XX纳米激光雷达的范围更小。后者可以使用更高的激光功率,因为人类的角膜会吸收这个波长的光,从而限制对视网膜的损伤。
更高的波长是昂贵的(相对于8XX-9XX纳米的系统来说是2-3倍)。以这些波长操作的公司需要证明更高成本的激光雷达是合理的,而测距性能似乎是目前的一个重要论据。
普林斯顿光波公司和Luminar公司率先宣布并展示了他们的15XX纳米激光雷达,对于汽车的探测范围在200-300米。
Luminar公司生产的激光雷达▼
Aeva最近宣布,他们的15XX纳米调频连续波(FMCW)激光雷达可以在500米处探测汽车,在350米处探测行人。在此之前,Aeye宣传说探测汽车的范围是1000米。
Argo也不甘示弱,最近宣布其在>1400纳米波长下工作的盖革模式激光雷达的探测范围为400米(Argo在2017年收购了普林斯顿光波公司)。
Argo声称,其激光雷达可以在夜间检测到反射率为1%的汽车(夜间的说法具有迷惑性,因为对于盖革模式来说,更具挑战性的情况是在明亮的阳光下)。目前还不清楚在明亮的阳光下,1%反射率的物体是否可以达到400米的范围(这将是相当具有突破性的!),以及在这些条件下,除了检测之外,物体识别是否也可以实现。
激光雷达传感器使用激光脉冲来渲染汽车周围环境的精确图像▼
激光雷达的探测距离对L4自动驾驶汽车很重要,但规格方面存在细微差别。对于安全至关重要的障碍物规避,自动驾驶汽车感知引擎需要在足够的时间内识别道路危险,以便进行安全操作,如刹车以避开轮胎碎片。
重要的是特定物体反射率的范围(10%似乎是一个合理的标准)和危险识别的高置信水平(> 99%,否则,误报率将非常高,导致不断刹车,导致乘客不适和投诉)。
值得注意的是,检测(“那里有东西,但我们不知道它是什么”)和识别(“那里是一辆抛锚的汽车或一个行人”)之间是有区别的。人们常常给出的是与检测相关的范围数字,这通常是不可行的。识别是一个更困难的问题,它依赖于分辨率和实时图像处理的准确性。
自动驾驶汽车利用传感器、感知引擎和人工智能来实施五种基本控制动作:刹车、转向、加速、减速或停车。到目前为止,最关键的、对时间/安全敏感的动作是在出现障碍时刹车。
刹车距离(将速度降至零所需的距离)是初始车速和安全/舒适的减速(通常为0.3g或约3m/s²)的函数。所需的感知范围是车辆速度和延迟时间的函数。
延迟时间是指获取原始传感器数据和应用安全动作(在本例中是刹车)之间的时间间隔,因为在此期间车辆仍在继续移动,因此延迟时间会影响所需的感知范围。较高的延迟时间要求较低的车速或较高的范围。图1显示了这三个量之间的关系。
图1:避障所需感知范围(0.3g制动)▼
多大的范围是足够的,承诺更高的范围有什么影响?在不久的将来(5-10年),L4车辆在高速公路上的运行速度不可能超过96-112公里/时。在这些速度下,大约200-250米的范围似乎是足够的。
重型卡车在制动时需要更低的减速水平、更高的范围。然而,较低的速度(88-96公里/时)确保200-250米的范围是足够的。
天气是另一个需要考虑的因素——恶劣天气下的减速水平较低,但车辆速度也较低,这使得200-250米的范围成为一个合理的操作目标。
获得更高的目标识别范围是昂贵的,因为需要消耗更多的激光雷达资源(激光功率、更灵敏的探测、更高的功耗等)。
有一些争论是关于提高极限的,比如增加安全边际和特定的用例(例如,糟糕的道路、恶劣的天气等)。但是使用这个性能指标的缺点是,在对象分辨率等其他参数方面有所妥协,如图2所示。
图2:随着范围的增加,目标分辨率下降▼
对象分辨率决定了识别的置信度,这对自动驾驶汽车的感知和控制行动至关重要。检测和识别轮胎碎片或一块砖头(通常为15厘米)通常需要8厘米的分辨率(至少需要2个像素来识别,3个像素则是理想的)。
将范围从200米翻倍到400米,需要将角分辨率从0.5 mrad提高到0.25 mrad,使原始数据量和计算带宽增加2倍。这导致了更高的光学和计算成本。它还会增加了延迟时间,需要更高的感知范围或降低车速(见图1)。希望图3能更清楚地阐述这种循环性。
图3:范围-分辨率-速率难题:1)高速和延迟需要更高的范围,2)需要更高的分辨率,3)更高的分辨率导致更高的数据速率以及,4)较低的帧速率,从而产生,5)更高的延迟和,6)更低的速度▼
承诺越来越高的探测范围并不是卓越激光雷达的秘诀。需要考虑使用情况和相互关联的系统规格,如分辨率、帧率和延迟。
必须澄清的是实现更远范围的确切条件和定义(反射率、置信度、延迟、照明条件、角分辨率等),并且需要明确说明在这个范围内实现的感知功能(检测、识别、鉴别)。
随着激光雷达成为关键的安全传感器,它们需要在普遍接受的标准和规格方面成熟起来。



编辑推荐




最新资讯
-
大卓智能端到端直播实测,16公里复杂路段挑
2025-04-25 17:16
-
《汽车轮胎耐撞击性能试验方法-车辆法》等
2025-04-25 11:45
-
“真实”而精确的能量流测试:电动汽车能效
2025-04-25 11:44
-
GRAS助力中国高校科研升级
2025-04-25 10:25
-
梅赛德斯-AMG使用VI-CarRealTime开发其控制
2025-04-25 10:21
