




 广告
广告





















































什么是智能网联汽车硬件在环测试?
2021-06-09 14:27:20· 来源:国汽智联 作者:国汽智联场景库项目部孙健宁

硬件在环hardware-in-the-loop,简称HIL,是一种对控制器进行测试的手段,可以替代大部分实车测试,并实现超前、高效地对智能网联汽车控制域进行测试,缩短智能
硬件在环hardware-in-the-loop,简称HIL,是一种对控制器进行测试的手段,可以替代大部分实车测试,并实现超前、高效地对智能网联汽车控制域进行测试,缩短智能网联汽车测试时间、节省成本以及有效提升智能网联汽车场景测试的效率,推动智能网联汽车落地,加速智能网联汽车算法迭代升级。
硬件在环的名字已经揭示了其含义。硬件,即被测对象,一般是控制器实物,比如整车控制器VCU、ADAS控制器或者是自动驾驶的计算平台;在环,强调了被测控制器要在一个闭合的回路里,即控制器接收被控对象的状态并发出控制指令、得到被控对象反馈并再次发出控制指令的过程。测试闭环形成后,就可通过设置被测对象不同的状态,来测试控制器能否正确处理不同工况、其各项功能是否都能正常工作。
如何形成测试闭环?这里用真实控制器和真实被控对象的情况来举例说明:当真实的自动驾驶控制器控制真实车辆时,控制器发送控制指令(如加速、减速、转向等)给车辆上的执行器,车辆根据控制指令做出相应的动作,同时车辆上安装的传感器检测状态信息(如车速、横摆角、障碍物信息等),并反馈给控制器,控制器继续根据新的状态信息计算并发出控制指令,周而复始。
进行hil测试时,使用HIL设备替代真实被控对象,接收所有控制指令,并模拟所有状态信息返回给真实控制器,使控制器以为自己在控制真实对象,从而形成测试闭环。


这要求HIL设备一方面能够按照真实被控对象和控制器接口的线路形式和协议收发信息,另一方面能够对控制指令做出正确响应并发出正确的状态值。从而,HIL设备一般由这样几部分构成:
1. 被控对象仿真模型:用来精确模拟被控对象,发出正确状态信息,比如车辆动力学模型、电池模型、交通场景模型和传感器模型等。
2. 实时处理器:高性能实时处理器用来运行仿真模型以及处理I/O通信、数据记录等各项HIL测试中的任务,使HIL设备模拟的虚拟被控对象能够实时运行,准确模拟真实对象。
3. I/O接口:用来模拟控制器和被控对象间的交互,按照真实的线路形式(如硬线、CAN总线、以太网等)和协议收发信息,按照与真实对象一样的形式通过线路与控制器相连,并实现信号的收发。
4. 操作界面:有时也被称为上位机软件、试验管理软件,其与实时处理器通信,提供可视化操作和观测界面,进行设备硬件、软件和测试任务的管理。
为了使用的便利性,HIL设备的各个部分有时会集成到一个机柜中。

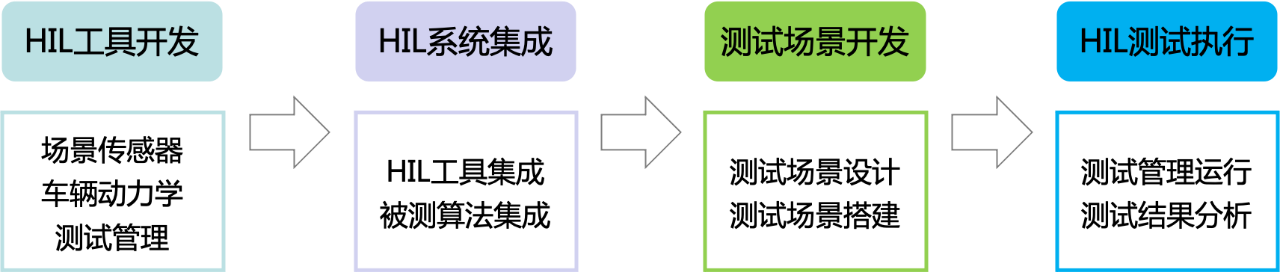
从步骤上来说,完整的HIL测试可以分为四个步骤:
1. HIL工具开发:包括场景和传感器仿真软件、车辆动力学仿真软件等软件工具和实时仿真机、IO接口板卡和传感器模拟器等硬件工具。
2. HIL集成:HIL系统集成包含两个方面的工作:①根据测试需要选择合适的测试工具并将其集成为完整的HIL测试环境;②将被测算法与HIL测试环境集成,实现闭环测试。
3. 测试场景开发:针对自动驾驶算法的设计运行域进行详细而系统的测试场景设计。
4. HIL测试执行:HIL测试一般是自动化测试,配置好测试用例后进行无人值守的自动化运行和评估,这有利于提供测试效率、正确性和一致性。
目前,国汽智联已建成MIL/HIL仿真测试能力和包含自然驾驶场景、危险事故场景、经验场景、标准法规及扩展场景在内的仿真测试场景库,支持对ADAS/自动驾驶算法和计算平台的测试服务。依托CAICV联盟智能感知工作组,建设中国特色的ICV传感器技术要求、测试评价标准体系和感知能力测试评价工具链。

硬件在环的名字已经揭示了其含义。硬件,即被测对象,一般是控制器实物,比如整车控制器VCU、ADAS控制器或者是自动驾驶的计算平台;在环,强调了被测控制器要在一个闭合的回路里,即控制器接收被控对象的状态并发出控制指令、得到被控对象反馈并再次发出控制指令的过程。测试闭环形成后,就可通过设置被测对象不同的状态,来测试控制器能否正确处理不同工况、其各项功能是否都能正常工作。
如何形成测试闭环?这里用真实控制器和真实被控对象的情况来举例说明:当真实的自动驾驶控制器控制真实车辆时,控制器发送控制指令(如加速、减速、转向等)给车辆上的执行器,车辆根据控制指令做出相应的动作,同时车辆上安装的传感器检测状态信息(如车速、横摆角、障碍物信息等),并反馈给控制器,控制器继续根据新的状态信息计算并发出控制指令,周而复始。
进行hil测试时,使用HIL设备替代真实被控对象,接收所有控制指令,并模拟所有状态信息返回给真实控制器,使控制器以为自己在控制真实对象,从而形成测试闭环。
这要求HIL设备一方面能够按照真实被控对象和控制器接口的线路形式和协议收发信息,另一方面能够对控制指令做出正确响应并发出正确的状态值。从而,HIL设备一般由这样几部分构成:
1. 被控对象仿真模型:用来精确模拟被控对象,发出正确状态信息,比如车辆动力学模型、电池模型、交通场景模型和传感器模型等。
2. 实时处理器:高性能实时处理器用来运行仿真模型以及处理I/O通信、数据记录等各项HIL测试中的任务,使HIL设备模拟的虚拟被控对象能够实时运行,准确模拟真实对象。
3. I/O接口:用来模拟控制器和被控对象间的交互,按照真实的线路形式(如硬线、CAN总线、以太网等)和协议收发信息,按照与真实对象一样的形式通过线路与控制器相连,并实现信号的收发。
4. 操作界面:有时也被称为上位机软件、试验管理软件,其与实时处理器通信,提供可视化操作和观测界面,进行设备硬件、软件和测试任务的管理。
为了使用的便利性,HIL设备的各个部分有时会集成到一个机柜中。
从步骤上来说,完整的HIL测试可以分为四个步骤:
1. HIL工具开发:包括场景和传感器仿真软件、车辆动力学仿真软件等软件工具和实时仿真机、IO接口板卡和传感器模拟器等硬件工具。
2. HIL集成:HIL系统集成包含两个方面的工作:①根据测试需要选择合适的测试工具并将其集成为完整的HIL测试环境;②将被测算法与HIL测试环境集成,实现闭环测试。
3. 测试场景开发:针对自动驾驶算法的设计运行域进行详细而系统的测试场景设计。
4. HIL测试执行:HIL测试一般是自动化测试,配置好测试用例后进行无人值守的自动化运行和评估,这有利于提供测试效率、正确性和一致性。
目前,国汽智联已建成MIL/HIL仿真测试能力和包含自然驾驶场景、危险事故场景、经验场景、标准法规及扩展场景在内的仿真测试场景库,支持对ADAS/自动驾驶算法和计算平台的测试服务。依托CAICV联盟智能感知工作组,建设中国特色的ICV传感器技术要求、测试评价标准体系和感知能力测试评价工具链。
- 下一篇:整车控制器VCU简介
- 上一篇:高温路试烤质量,安全保障要先行







最新资讯
-
漫说信息智能 · 电动车防晕车大作战
2025-04-27 16:28
-
R171.01对DCAS的要求⑨
2025-04-27 15:29
-
智驾标准法规体系大全
2025-04-27 15:28
-
国内最大汽车创作者大会开幕,懂车帝投入5
2025-04-27 13:18
-
大卓智能端到端直播实测,16公里复杂路段挑
2025-04-25 17:16
