




 广告
广告





















































基于AUTOSAR的智能网联汽车分层式结构设计
2021-06-11 22:48:13· 来源:中汽数据(天津)有限公司

来源:潘霞 张庆余 张苏林 中汽数据(天津)有限公司基于 AUTOSAR 架构设计的智能网联汽 车分层式结构,形成车辆底层控制、核心自 动驾驶系统以及上层应用的模块
来源:潘霞 张庆余 张苏林 中汽数据(天津)有限公司
基于 AUTOSAR 架构设计的智能网联汽 车分层式结构,形成车辆底层控制、核心自 动驾驶系统以及上层应用的模块化和平台化, 进一步促进核心系统层和底层数据接口、硬 件接口,以及核心系统层和上层应用的数据 接口和软件接口定义的标准化,可实现根据 不同项目、不同车型、不同功能配置和不同 硬件选择相应的软件模块,进行裁剪、移植 和集成,从而缩短项目的软件开发周期并降 低开发成本,大幅提升车辆与系统的灵活适 配性,进而积极推动自动驾驶车辆的大规模 生产与应用。
1. AUTOSAR 架构简析
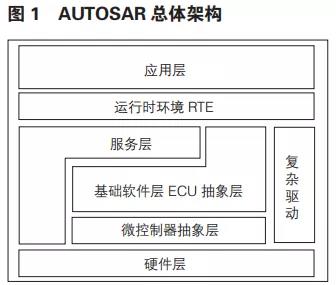
AUTOSAR 定义的软件架构,主要采用 了分层式结构,围绕运行时环境 (RTE) 展开, RTE 层以上是应用层部分,采用软件组件 (SWC) 的形式定义。而 RTE 层的下方为基础 软件层 (BSW),其分层结构见图 1,基础软 件可分为两个部分,分别是与硬件不相关的 基础软件,包括操作系统、服务、通信等, 以及和硬件相关的基础软件,包括微控制器 抽象层 MCAL 和复杂驱动 CDD。应用层与 基础软件层的连接是通过 RTE 层,定义接口 标准实现层间的数据交互。
1.1 标准接口定义
AUTOSAR 共定义了三种类型的接口, 分别是 AUTOSAR 接口、标准 AUTOSAR 接口以及标准接口。
AUTOSAR接口一方面描述软件组件 之间获取和提供的数据和服务,另一方面描 述软件组件与ECU抽象层、复杂驱动之间 进行的获取和提供的服务。此种接口是按照AUTOSAR接口定义规则来定义的,这些接口中的一部分已经由AUTOSAR定义,另外一部分需要整车企业自定义,通过这些接口实现了软件组件在不同的ECU上的可重用性。
标准 AUTOSAR 接口完全由 AUTOSAR 标准来定义,主要包括两种类型的接口 : 基 础软件提供给应用程序的服务接口以及整车企业根据需要配置的标准接口。标准接口即 标准 API,一般由 C 语言定义,主要实现 ECU 内部 BSW 模块之间,以及运行时环境 和操作系统之间的函数调用关系。
1.2 虚拟功能总线VFB 及运行环境 RTE
AUTOSAR 将底层基础软件和网络结构 抽象成虚拟的功能总线,即 VFB,它是各类 通信机制的一个集合。运行时环境 RTE 是指 单个 ECU 上对 VFB 接口的实现。由于各个 软件组件之间无法实现直接通信,因此,需 要 RTE 进行相应的封装,提供层间通信所需 的 API,进而使用端口等方式进行数据信息 交互。也就是说,软件组件只需向 VFB 发送 输出信号。
运行时环境 RTE 类似于面向对象编程的 主要思想,各个 ECU 和其所对应的 RTE 都 是特定的,RTE 负责各个软件组件与基础软 件之间的通信。简单来说,RTE 可以看作是 VFB 的接口实现。
1.3 基础软件层 BSW
基础软件可分为两个部分,分别是与硬件不相关的基础软件,包括操作系统、服务、 通信等,以及和硬件相关的基础软件,包括微控制器抽象层MCAL、ECU 抽象层和复杂驱动CDD。其结构如图2所示。
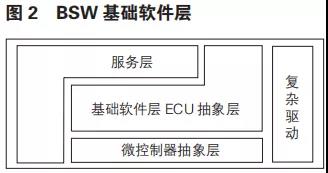
其中微控制 器抽象层包括硬件驱动程序,用于访问内存、 通信等。ECU抽象层主要负责实现通信、内容或者I/O的访问,为其提供统一的接口。
2. 智能网联汽车分层式结构设计
2.1 智能网联汽车关键技术
智能网联汽车代表了未来汽车产业技 术的发展方向和战略制高点,也是国际汽 车产业未来竞争的重要阵地。为落实《中 国制造 2025》和《汽车产业中长期发展规 划》,国家发改委在 2018 年发布了《智能 汽车创新发展战略(征求意见稿)》,指出了中国标准智能汽车全面发展的六大战 略任务。智能网联汽车产业是一个大的产业集群,关键核心技术的持续攻关是中国 在智能网联汽车领域引领世界汽车工业发 展的重要因素。以接口引领自动驾驶相关标准建立、建设各级别自动驾驶产品准入 测试流程为主线,能够有效地向产业链上下游延伸,贯彻标准先行方针,整合行业 资源,推动企业在环境感知、高精地图与 高精定位、V2X、多传感器融合、控制决策等上下游关联技术领域实现突破。
2.2 智能网联汽车分层式结构
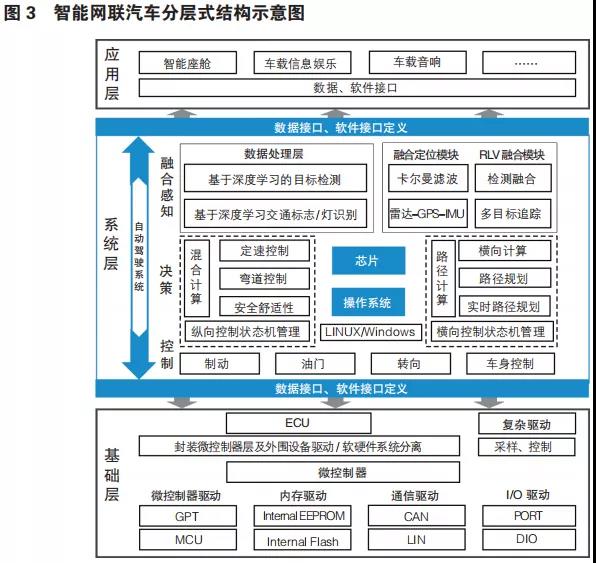
智能网联汽车分层式结构以自动驾驶系 统为核心中间层,系统层对下连接车辆底层 (基础层),包括车辆控制器、ECU、内存驱动、 通信驱动等,对上连接应用层,主要包括面 向用户的智能座舱、车载信息娱乐系统等, 具体分层形式及各层所包含内容如图3所示。
2.2.1 基础层
智能网联汽车自动驾驶的执行离不开车 辆底层控制系统,自动驾驶的落脚点仍然是 在于“驾驶”,也就是执行机构。在车辆具 备线控的基础上,通过自动驾驶系统层的环 境感知、路径规划、智能控制等系列技术, 输出至车辆底层,进而执行转向、制动、加速等动作,实现真正意义上的自动驾驶。
其中自动驾驶系统层的第三层级——控制层,需要定义相应的接口标准,包括数据接口、软件接口,以能够和不同的车辆底盘进行灵活适配为目的,在尽可能少量的标定工作需求下,完成底层的对接。
2.2.2 核心系统层
系统层即对应自动驾驶系统,分为感知、 决策、控制三层,感知层以多传感器融合感 知算法为核心,结合深度学习等先进算法, 能够实现对周边环境、障碍物、交通标识、行人等的准确识别。决策层重点在于路径规划算法的准确性和实时性,依托于环境感知和导航子系统的输出信息,并通过一些特定约束条件(如无碰撞、安全抵达终点等), 规划出汽车的行车路径。控制层主要负责车 辆的横纵向精准控制。
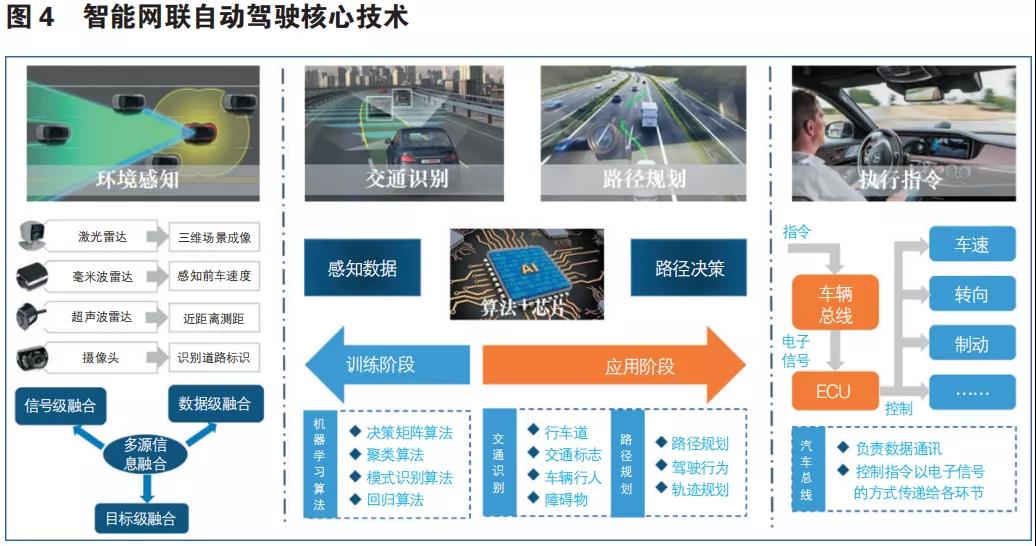
系统层对接上下两层的核心在于接口定 义的标准化,也就是说系统层和底层数据接口、硬件接口,以及系统层和应用层的数据接口和软件接口定义的标准化,接口的标准化是实现自动驾驶系统快速移植的关键。可根据不同项目、不同车型、不同功能配置和不同硬件选择相应的软件模块,进行裁剪、 移植和集成,大幅提升车辆与系统的灵活适配性,进而促进自动驾驶车辆的大规模生产与产业化落地 , 见图4。
2.2.3 应用层
应用层是指通过搭载智能座舱、车载信 息系统等应用层设施,面向用户需求形成多场景的应用环境,此外,还包括特定场景下的自动驾驶落地运营车,如智能送餐车、智能安防巡逻车等等。其核心仍是基于自动驾驶系统的场景应用。
基于 AUTOSAR 架构设计的智能网联汽 车分层式结构,形成车辆底层控制、核心自 动驾驶系统以及上层应用的模块化和平台化, 进一步促进核心系统层和底层数据接口、硬 件接口,以及核心系统层和上层应用的数据 接口和软件接口定义的标准化,可实现根据 不同项目、不同车型、不同功能配置和不同 硬件选择相应的软件模块,进行裁剪、移植 和集成,从而缩短项目的软件开发周期并降 低开发成本,大幅提升车辆与系统的灵活适 配性,进而积极推动自动驾驶车辆的大规模 生产与应用。
1. AUTOSAR 架构简析
AUTOSAR 定义的软件架构,主要采用 了分层式结构,围绕运行时环境 (RTE) 展开, RTE 层以上是应用层部分,采用软件组件 (SWC) 的形式定义。而 RTE 层的下方为基础 软件层 (BSW),其分层结构见图 1,基础软 件可分为两个部分,分别是与硬件不相关的 基础软件,包括操作系统、服务、通信等, 以及和硬件相关的基础软件,包括微控制器 抽象层 MCAL 和复杂驱动 CDD。应用层与 基础软件层的连接是通过 RTE 层,定义接口 标准实现层间的数据交互。
1.1 标准接口定义
AUTOSAR 共定义了三种类型的接口, 分别是 AUTOSAR 接口、标准 AUTOSAR 接口以及标准接口。
AUTOSAR接口一方面描述软件组件 之间获取和提供的数据和服务,另一方面描 述软件组件与ECU抽象层、复杂驱动之间 进行的获取和提供的服务。此种接口是按照AUTOSAR接口定义规则来定义的,这些接口中的一部分已经由AUTOSAR定义,另外一部分需要整车企业自定义,通过这些接口实现了软件组件在不同的ECU上的可重用性。
标准 AUTOSAR 接口完全由 AUTOSAR 标准来定义,主要包括两种类型的接口 : 基 础软件提供给应用程序的服务接口以及整车企业根据需要配置的标准接口。标准接口即 标准 API,一般由 C 语言定义,主要实现 ECU 内部 BSW 模块之间,以及运行时环境 和操作系统之间的函数调用关系。
1.2 虚拟功能总线VFB 及运行环境 RTE
AUTOSAR 将底层基础软件和网络结构 抽象成虚拟的功能总线,即 VFB,它是各类 通信机制的一个集合。运行时环境 RTE 是指 单个 ECU 上对 VFB 接口的实现。由于各个 软件组件之间无法实现直接通信,因此,需 要 RTE 进行相应的封装,提供层间通信所需 的 API,进而使用端口等方式进行数据信息 交互。也就是说,软件组件只需向 VFB 发送 输出信号。
运行时环境 RTE 类似于面向对象编程的 主要思想,各个 ECU 和其所对应的 RTE 都 是特定的,RTE 负责各个软件组件与基础软 件之间的通信。简单来说,RTE 可以看作是 VFB 的接口实现。
1.3 基础软件层 BSW
基础软件可分为两个部分,分别是与硬件不相关的基础软件,包括操作系统、服务、 通信等,以及和硬件相关的基础软件,包括微控制器抽象层MCAL、ECU 抽象层和复杂驱动CDD。其结构如图2所示。
其中微控制 器抽象层包括硬件驱动程序,用于访问内存、 通信等。ECU抽象层主要负责实现通信、内容或者I/O的访问,为其提供统一的接口。
2. 智能网联汽车分层式结构设计
2.1 智能网联汽车关键技术
智能网联汽车代表了未来汽车产业技 术的发展方向和战略制高点,也是国际汽 车产业未来竞争的重要阵地。为落实《中 国制造 2025》和《汽车产业中长期发展规 划》,国家发改委在 2018 年发布了《智能 汽车创新发展战略(征求意见稿)》,指出了中国标准智能汽车全面发展的六大战 略任务。智能网联汽车产业是一个大的产业集群,关键核心技术的持续攻关是中国 在智能网联汽车领域引领世界汽车工业发 展的重要因素。以接口引领自动驾驶相关标准建立、建设各级别自动驾驶产品准入 测试流程为主线,能够有效地向产业链上下游延伸,贯彻标准先行方针,整合行业 资源,推动企业在环境感知、高精地图与 高精定位、V2X、多传感器融合、控制决策等上下游关联技术领域实现突破。
2.2 智能网联汽车分层式结构
智能网联汽车分层式结构以自动驾驶系 统为核心中间层,系统层对下连接车辆底层 (基础层),包括车辆控制器、ECU、内存驱动、 通信驱动等,对上连接应用层,主要包括面 向用户的智能座舱、车载信息娱乐系统等, 具体分层形式及各层所包含内容如图3所示。
2.2.1 基础层
智能网联汽车自动驾驶的执行离不开车 辆底层控制系统,自动驾驶的落脚点仍然是 在于“驾驶”,也就是执行机构。在车辆具 备线控的基础上,通过自动驾驶系统层的环 境感知、路径规划、智能控制等系列技术, 输出至车辆底层,进而执行转向、制动、加速等动作,实现真正意义上的自动驾驶。
其中自动驾驶系统层的第三层级——控制层,需要定义相应的接口标准,包括数据接口、软件接口,以能够和不同的车辆底盘进行灵活适配为目的,在尽可能少量的标定工作需求下,完成底层的对接。
2.2.2 核心系统层
系统层即对应自动驾驶系统,分为感知、 决策、控制三层,感知层以多传感器融合感 知算法为核心,结合深度学习等先进算法, 能够实现对周边环境、障碍物、交通标识、行人等的准确识别。决策层重点在于路径规划算法的准确性和实时性,依托于环境感知和导航子系统的输出信息,并通过一些特定约束条件(如无碰撞、安全抵达终点等), 规划出汽车的行车路径。控制层主要负责车 辆的横纵向精准控制。
系统层对接上下两层的核心在于接口定 义的标准化,也就是说系统层和底层数据接口、硬件接口,以及系统层和应用层的数据接口和软件接口定义的标准化,接口的标准化是实现自动驾驶系统快速移植的关键。可根据不同项目、不同车型、不同功能配置和不同硬件选择相应的软件模块,进行裁剪、 移植和集成,大幅提升车辆与系统的灵活适配性,进而促进自动驾驶车辆的大规模生产与产业化落地 , 见图4。
2.2.3 应用层
应用层是指通过搭载智能座舱、车载信 息系统等应用层设施,面向用户需求形成多场景的应用环境,此外,还包括特定场景下的自动驾驶落地运营车,如智能送餐车、智能安防巡逻车等等。其核心仍是基于自动驾驶系统的场景应用。



编辑推荐




最新资讯
-
大卓智能端到端直播实测,16公里复杂路段挑
2025-04-25 17:16
-
《汽车轮胎耐撞击性能试验方法-车辆法》等
2025-04-25 11:45
-
“真实”而精确的能量流测试:电动汽车能效
2025-04-25 11:44
-
GRAS助力中国高校科研升级
2025-04-25 10:25
-
梅赛德斯-AMG使用VI-CarRealTime开发其控制
2025-04-25 10:21
