




 广告
广告





















































自动驾驶领域这8种数据集,你肯定需要!
2021-06-30 22:45:43· 来源:江大白

1 图像分割1.1 SYNTHIA数据集数据集图片:数据集内容:SYNTHIA数据集,包含从虚拟城市渲染的逼真的帧的集合,并具有针对13类的精确像素级语义注释:杂项,天空,
1 图像分割
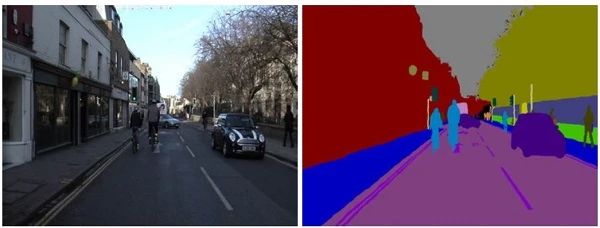
1.1 SYNTHIA数据集
数据集图片:


数据集内容:SYNTHIA数据集,包含从虚拟城市渲染的逼真的帧的集合,并具有针对13类的精确像素级语义注释:杂项,天空,建筑物,道路,人行道,栅栏,植被,电线杆,汽车,标志,行人,骑自行车的人,车道标记,在驾驶场景的环境中,帮助语义分割和相关的场景理解问题。
数据集数量:数据集包含来自视频流的200,000张高清图像,和来自独立快照的20,000高清图像。
场景多样性:欧式城镇,现代城市,高速公路和绿色区域
多种动态对象:汽车,行人和骑自行车的人
多个季节:冬季,秋季,春季和夏季的专用主题
照明条件和天气:动态的灯光和阴影,几种白天模式,降雨模式和夜间模式。
1.2 CamSeq01数据集
数据集图片:
数据集内容:CamSeq01是一个地面数据集,可自由用于视频目标识别中的研究工作。该数据库是唯一的,因为它是一个视频序列,由高分辨率图像组成。
该数据集最初是针对自动驾驶汽车的问题而设计的。此序列描绘了从一辆动感的汽车拍摄的剑桥市的动感驾驶场景。这是一个具有挑战性的数据集,因为除了汽车的自我运动之外,其他汽车,自行车和行人也有自己的运动,而且它们经常相互堵塞。
数据集数量:数据集是在英国剑桥的街道上开车,将摄像头安装在汽车的乘客座椅上。使用了Panasonic HVX200数码相机,以30fps的速度捕获960×720像素的帧,拍摄了大约2个小时。
CaTLOV数据集是101个连续帧的子序列,每隔一个帧(来自202个帧)进行二次采样,相当于连续行驶6秒钟。其中每个像素被手动分配给与驾驶环境相关的以下32个对象类别之一:

2 信号灯检测
2.1 Bosch Small Traffic Lights数据集
数据集图片:

数据集内容:该数据集是基于视觉的交通信号灯检测的数据集,涵盖了各种各样的道路场景:
· 市中心繁忙的街道场景
· 交通密度变化的郊区多车道道路
· 密集的走走停停的交通
· 道路工程
· 光照/曝光变化很大
· 乌云密布的天空,有小雨
· 闪烁/波动的交通信号灯
· 多个可见交通信号灯
· 可能与交通信号灯相混淆的图像部分(例如,大型圆形尾灯)
数据集数量:该数据集包含13427个摄像机图像,训练集5093张,测试集8334张。分辨率为1280x720像素,并包含大约24000个带注释的交通信号灯。注释包括交通信号灯的边界框以及每个交通信号灯的当前状态(活动灯)。
相机图像是使用红-清晰-蓝色滤镜拍摄的原始12位HDR图像,以及重构的8位RGB彩色图像。RGB图像用于调试,也可以用于训练。但是,RGB转换过程有一些缺点。某些转换后的图像可能包含伪像,并且颜色分布可能看起来异常。
3 通用检测
3.1 D²-City数据集
数据集图片:

数据集内容:D²-City 是一个大规模行车视频数据集,提供了超过一万段行车记录仪记录的前视视频数据。所有视频均以高清(720P)或超高清(1080P)分辨率录制。
采集自中国多个城市,涵盖了不同的天气、道路、交通状况,尤其是极复杂和多样性的交通场景。
数据集数量:D²-City 数据集采集自运行在中国五个城市的滴滴运营车辆。所提供的原始数据均存储为帧率25fps、时长30秒的短视频。
其中约一千段视频提供了包括目标框位置、目标类别和追踪ID信息的逐帧标注,涵盖了共12类行车和道路相关的目标类别。(car、van、bus、truck、person、bicycle、motorcycle、open-tricycle、closed-tricycle、forklift、large-block、small-block)
4 车辆检测
4.1 NYC3DCars数据集
数据集图片:

数据集内容:NYC3DCars数据集是基于视觉任务的车辆检测数据库,主要有三种应用方式:
· 3D 重建:NYC3DCars 中的每张照片都已在地球上进行了地理注册,从而在以地球为中心的固定于地球的坐标系中提供了完整的相机内部和外部信息,从而实现了与现有地理空间数据的无缝集成。
· 地理数据:集成了诸如 OpenStreetMap 和 NYC OpenData 提供的数据库,以便轻松访问道路,人行道和中间多边形等地理特征以及道路网络的连通性。
· 车辆标注:对数据集中的车辆,进行详细的标注。标注包括完整的 6 自由度车辆姿态,车辆类型,2D 车辆边界框和一天中的近似照片时间。
5 3D检测
5.1 Boxy vehicle detection dataset
数据集图片:

数据集内容:Boxy vehicle detection 数据集是一个大型车辆检测数据集,可用于2D检测和3D检测,包含将近200万辆带注释的车辆,用于训练和评估高速公路上自动驾驶汽车的对象检测方法。
数据集数量:数据集包含200,000张图片,1,990,000辆标注的车辆,5百万像素分辨率,主要是阳光,雨,黄昏,夜晚的场景。
5.2 Waymo开放数据集
数据集图片:

数据集内容:Waymo开放数据集是谷歌母公司 Alphabet 旗下的自动驾驶公司 ,Waymo 开源的自动驾驶数据库。
数据集数量:Waymo数据集由 Waymo 自驾汽车在各种条件下采集的高度标注数据组成,该数据包含:
· 尺寸和覆盖范围:此版本包含 1,000 个自动驾驶路段的数据。每个数据片段捕获 20 秒的连续驾驶过程,相当于每个镜头标注参数为 10 Hz 的 200,000 帧。这样的连续镜头可以使得研究人员易于开发模型来跟踪和预测其它道路使用者的行为。
· 多样化的驾驶环境:该数据集涵盖凤凰城、亚利桑那州、柯克兰、华盛顿州、山景城、加利福尼亚州和加利福尼亚州旧金山的密集城市和郊区环境,并捕捉了各种驾驶条件下的数据(包含:白天和黑夜、黎明和黄昏、晴天和下雨天)。
· 高分辨率的 360 度视图:每个分段包含了来自五个高分辨率 Waymo 激光雷达和五个前置与侧面摄像头的数据。
· 密集标注:数据集包括激光雷达框架和图像;车辆、行人、骑自行车者和标识牌都经过了精心的标记,共捕获了 1200 万个 3D 标注和 120 万个 2D 标注。
6 模拟驾驶
6.1 comma.ai driving dataset
数据集图片:
数据集内容:该数据集包含10个可变大小的视频剪辑,这些视频剪辑安装在Acura ILX 2016的挡风玻璃上,并以20 Hz的频率记录下来。与视频同时,我们还记录了一些测量数据,例如汽车的速度,加速度,转向角,GPS坐标,陀螺仪角度。
1.1 SYNTHIA数据集
数据集图片:
数据集内容:SYNTHIA数据集,包含从虚拟城市渲染的逼真的帧的集合,并具有针对13类的精确像素级语义注释:杂项,天空,建筑物,道路,人行道,栅栏,植被,电线杆,汽车,标志,行人,骑自行车的人,车道标记,在驾驶场景的环境中,帮助语义分割和相关的场景理解问题。
数据集数量:数据集包含来自视频流的200,000张高清图像,和来自独立快照的20,000高清图像。
场景多样性:欧式城镇,现代城市,高速公路和绿色区域
多种动态对象:汽车,行人和骑自行车的人
多个季节:冬季,秋季,春季和夏季的专用主题
照明条件和天气:动态的灯光和阴影,几种白天模式,降雨模式和夜间模式。
1.2 CamSeq01数据集
数据集图片:
数据集内容:CamSeq01是一个地面数据集,可自由用于视频目标识别中的研究工作。该数据库是唯一的,因为它是一个视频序列,由高分辨率图像组成。
该数据集最初是针对自动驾驶汽车的问题而设计的。此序列描绘了从一辆动感的汽车拍摄的剑桥市的动感驾驶场景。这是一个具有挑战性的数据集,因为除了汽车的自我运动之外,其他汽车,自行车和行人也有自己的运动,而且它们经常相互堵塞。
数据集数量:数据集是在英国剑桥的街道上开车,将摄像头安装在汽车的乘客座椅上。使用了Panasonic HVX200数码相机,以30fps的速度捕获960×720像素的帧,拍摄了大约2个小时。
CaTLOV数据集是101个连续帧的子序列,每隔一个帧(来自202个帧)进行二次采样,相当于连续行驶6秒钟。其中每个像素被手动分配给与驾驶环境相关的以下32个对象类别之一:
2 信号灯检测
2.1 Bosch Small Traffic Lights数据集
数据集图片:
数据集内容:该数据集是基于视觉的交通信号灯检测的数据集,涵盖了各种各样的道路场景:
· 市中心繁忙的街道场景
· 交通密度变化的郊区多车道道路
· 密集的走走停停的交通
· 道路工程
· 光照/曝光变化很大
· 乌云密布的天空,有小雨
· 闪烁/波动的交通信号灯
· 多个可见交通信号灯
· 可能与交通信号灯相混淆的图像部分(例如,大型圆形尾灯)
数据集数量:该数据集包含13427个摄像机图像,训练集5093张,测试集8334张。分辨率为1280x720像素,并包含大约24000个带注释的交通信号灯。注释包括交通信号灯的边界框以及每个交通信号灯的当前状态(活动灯)。
相机图像是使用红-清晰-蓝色滤镜拍摄的原始12位HDR图像,以及重构的8位RGB彩色图像。RGB图像用于调试,也可以用于训练。但是,RGB转换过程有一些缺点。某些转换后的图像可能包含伪像,并且颜色分布可能看起来异常。
3 通用检测
3.1 D²-City数据集
数据集图片:
数据集内容:D²-City 是一个大规模行车视频数据集,提供了超过一万段行车记录仪记录的前视视频数据。所有视频均以高清(720P)或超高清(1080P)分辨率录制。
采集自中国多个城市,涵盖了不同的天气、道路、交通状况,尤其是极复杂和多样性的交通场景。
数据集数量:D²-City 数据集采集自运行在中国五个城市的滴滴运营车辆。所提供的原始数据均存储为帧率25fps、时长30秒的短视频。
其中约一千段视频提供了包括目标框位置、目标类别和追踪ID信息的逐帧标注,涵盖了共12类行车和道路相关的目标类别。(car、van、bus、truck、person、bicycle、motorcycle、open-tricycle、closed-tricycle、forklift、large-block、small-block)
4 车辆检测
4.1 NYC3DCars数据集
数据集图片:
数据集内容:NYC3DCars数据集是基于视觉任务的车辆检测数据库,主要有三种应用方式:
· 3D 重建:NYC3DCars 中的每张照片都已在地球上进行了地理注册,从而在以地球为中心的固定于地球的坐标系中提供了完整的相机内部和外部信息,从而实现了与现有地理空间数据的无缝集成。
· 地理数据:集成了诸如 OpenStreetMap 和 NYC OpenData 提供的数据库,以便轻松访问道路,人行道和中间多边形等地理特征以及道路网络的连通性。
· 车辆标注:对数据集中的车辆,进行详细的标注。标注包括完整的 6 自由度车辆姿态,车辆类型,2D 车辆边界框和一天中的近似照片时间。
5 3D检测
5.1 Boxy vehicle detection dataset
数据集图片:
数据集内容:Boxy vehicle detection 数据集是一个大型车辆检测数据集,可用于2D检测和3D检测,包含将近200万辆带注释的车辆,用于训练和评估高速公路上自动驾驶汽车的对象检测方法。
数据集数量:数据集包含200,000张图片,1,990,000辆标注的车辆,5百万像素分辨率,主要是阳光,雨,黄昏,夜晚的场景。
5.2 Waymo开放数据集
数据集图片:
数据集内容:Waymo开放数据集是谷歌母公司 Alphabet 旗下的自动驾驶公司 ,Waymo 开源的自动驾驶数据库。
数据集数量:Waymo数据集由 Waymo 自驾汽车在各种条件下采集的高度标注数据组成,该数据包含:
· 尺寸和覆盖范围:此版本包含 1,000 个自动驾驶路段的数据。每个数据片段捕获 20 秒的连续驾驶过程,相当于每个镜头标注参数为 10 Hz 的 200,000 帧。这样的连续镜头可以使得研究人员易于开发模型来跟踪和预测其它道路使用者的行为。
· 多样化的驾驶环境:该数据集涵盖凤凰城、亚利桑那州、柯克兰、华盛顿州、山景城、加利福尼亚州和加利福尼亚州旧金山的密集城市和郊区环境,并捕捉了各种驾驶条件下的数据(包含:白天和黑夜、黎明和黄昏、晴天和下雨天)。
· 高分辨率的 360 度视图:每个分段包含了来自五个高分辨率 Waymo 激光雷达和五个前置与侧面摄像头的数据。
· 密集标注:数据集包括激光雷达框架和图像;车辆、行人、骑自行车者和标识牌都经过了精心的标记,共捕获了 1200 万个 3D 标注和 120 万个 2D 标注。
6 模拟驾驶
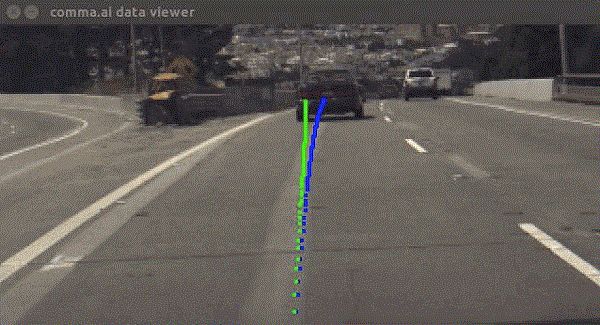
6.1 comma.ai driving dataset
数据集图片:
数据集内容:该数据集包含10个可变大小的视频剪辑,这些视频剪辑安装在Acura ILX 2016的挡风玻璃上,并以20 Hz的频率记录下来。与视频同时,我们还记录了一些测量数据,例如汽车的速度,加速度,转向角,GPS坐标,陀螺仪角度。



编辑推荐




最新资讯
-
标准解读丨ISO 21111 《道路车辆车载以太网
2025-03-31 19:15
-
清研精准兆瓦级充放电测试设备——重新定义
2025-03-31 19:13
-
强强联合:imc FAMOS内嵌Python接口,提高
2025-03-31 19:12
-
汽车动力电池与发动机系列标准宣贯会在武汉
2025-03-31 16:08
-
氢内燃机2.0-西南研究院(SwRI)启动第二阶
2025-03-31 16:06
