




 广告
广告





















































广汽机电耦合系统策略研究与性能分析
2021-07-01 00:14:25· 来源:广州汽车集团股份有限公司 汽车工程研究院 作者:梁伟强,张雄

本文首先分析了G-MC 机电耦合系统结构原理,分析其各个驱动模式下的动力学模型;综合考虑各驱动模式的系统效率,制定了模式切换时策略。为验证设计的合理性,进
本文首先分析了G-MC 机电耦合系统结构原理,分析其各个驱动模式下的动力学模型;综合考虑各驱动模式的系统效率,制定了模式切换时策略。为验证设计的合理性,进行了动力性经济性仿真和 G-MC 传动效率试验验证,并与同期车型进行性能对比分析,证明了G-MC混合系统的先进性。
1. G-MC 系统方案
1.1 系统结构与参数

如图1所示,新能源汽车混合动力系统一般包括发动机、机电耦合机构、动力电池、整车控制器(VCU)、电机控制器(IPU)、耦合控制器(CCU) 等。
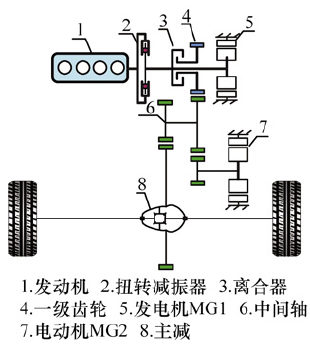
G-MC采用如图2所示的串并联式混合动力系统,该系统具备纯电动模式、混合驱动模式、串联增程模式、驻车发电等多种工作模式。机电耦合系统将发电机、驱动电机、离合器、传动系统及液压系统等集成在一个箱体内。
G-MC外形如图3所示。

1.2 驱动模式分析
该G-MC机电耦合系统可以实现多种驱动模式,包括纯电动模式、混合驱动模式、串联增程模式、驻车发电等多种工作模式。
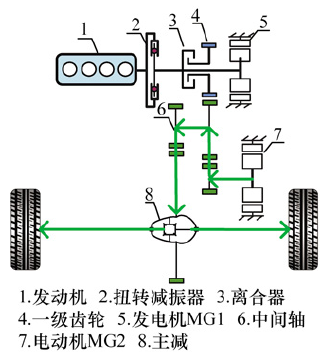
当机电耦合系统中的离合器断开、发动机和发电机不提供动力输出时,G-MC工作在纯电模式。此时功率流由驱动电机经中间轴、主减速齿轮传递至车轮,功率流如图4所示。
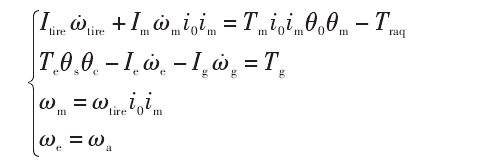
纯电动模式主要工作在电量充足且轮端需求转矩不大的行驶工况下,其传动系统动力学模型如下所示:

当G-MC工作在串联增程模式时,离合器处于断开状态,发动机带动发电机发出电能,一部分能量通过发电机给电池充电,一部分给驱动电机供电,而驱动电机单独驱动整车。串联增程模式下功率流如图5所示。

串联增程模式主要工作在电池电量低或急加速需求扭矩较大的行驶工况,其传动系统动力学模型如下所示:

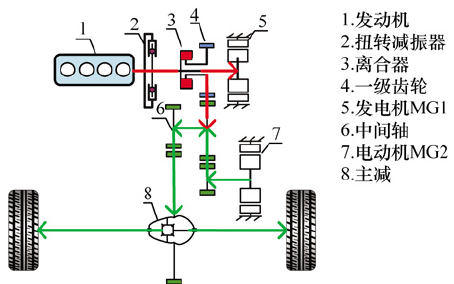
当离合器结合,耦合系统工作在混合驱动模式,该模式最大的特点是整车需求功率主要由发动机提供,不足的功率由驱动电机提供而多余的功率由发电机吸收,混合驱动模式下功率流如图6所示。
该模式下传动系统动力学模型如下所示:

2. G-MC控制策略
控制策略是耦合系统中至关重要的一部分,它包括模式划分、模式切换和功率分配控制策略。
其中模式划分控制策略主要是根据车辆的当前车速、转矩需求和当前 SOC,在各种驱动模式中选取最合适的工作模式;模式切换控制策略是通过协调控制动力源转速转矩与执行机构的工作状态,实现平稳且无动力中断的模式切换过程;而功率分配策略是耦合模式下对两个动力源的功率进行分配,从而实现最优系统效率提高整车经济型增加续驶里程。
2.1 模式划分
G-MC混合系统具有多个能量源和动力部件,可以工作在多种驱动模式。为使车辆在兼顾动力性的同时提升经济性,车辆驱动模式的选择至关重要。根据插电式混合动力汽车在运行过程中电池SOC变化情况,可将其运行模式划分为两个阶段,分别是:电量消耗(ChargeDepleting, CD) 阶段和电量维持(Charge Sustaining,CS)阶段。
在 CD 阶段,为了尽可能利用动力电池内存储的电量,车辆在纯电动模式下运行。仅当整车需求功率超过电池所能提供的最大功率后,发动机才启动,对整车的功率需求进行补充,以满足动力电池的不足。
随着汽车运行,电池 SOC 逐渐降低,当电池电量消耗到一定值后,进入CS阶段,此时耦合系统在纯电动、串联增程和并联模式之间进行切换,以保证SOC在一定区间内保持平衡。
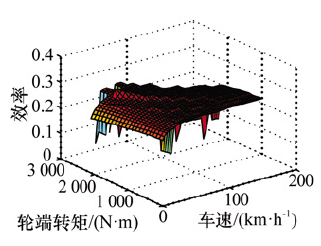
因此,CS阶段的模式划分边界至关重要,本文首先基于系统效率最优得到初步的系统效率 (如图7所示,其中纯电模式效率计及串联模式平均发电效率)及模式划分边界,之后考虑实车中各种因素对边界进行修正,得到最终的模式边界如图8所示。
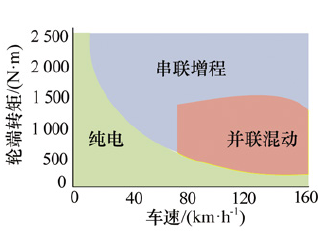
其中,在行驶模式的选择中额外考虑的因素如下:(1)整车各工况下电量的平衡;(2)驾驶员动力性需求;(3)系统经济性;(4)部件运行状态对模式选择的干预;(5)故障处理对模式选择的干预;(6)特殊情况下满足诊断仪的干预。
2.2 模式切换控制策略
模式切换控制策略是指串联增程模式和并联混动模式之间的切换过程控制。基于G-MC构型,通过协调发动机与双电机的工作点以及离合器的工作状态,可实现驱动模式之间的平顺且无动力中断切换。
以串联到并联的切换过程为例,切换过程流程如图9所示。
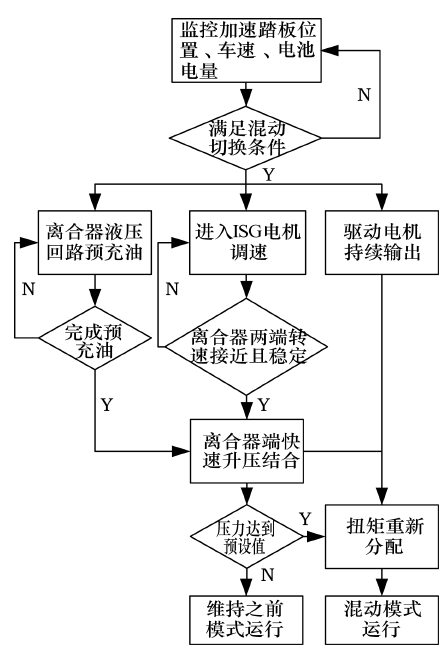
具体实现过程如下。
(1)在混合动力车辆行驶过程中,检测车速、动力电池电量和加速踏板位置作为进行离合器接合的判断条件。
(2)检测车辆是否满足以下条件:
①当前加速踏板位置下的车速是否高于预设值;
②电池电量是否处于预设值区域;
③各部件无影响离合器接合的故障。
(3)进入发动机调速模式,准备离合器接合,驱动电机继续输出扭矩维持车辆运行。
(4)以驱动电机转速为目标,采用PID控制调节发动机转速。
(5)继续检测发动机转数和驱动电机转速,当发动机转速与目标转速之间转速差小于设定值Δω,并维持一定时间T,离合器接合,车辆进入并联驱动模式。
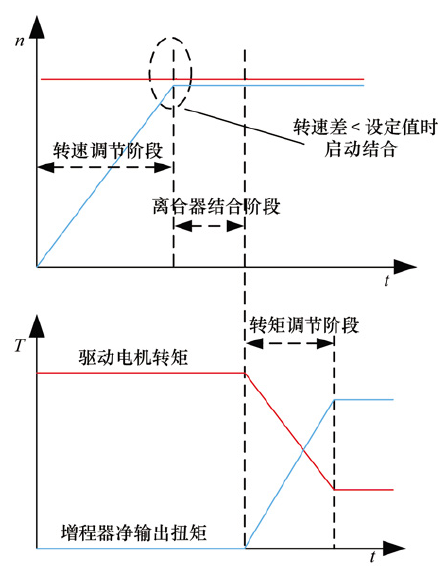
(6) 在离合器接合上后,在总需求扭矩不变的前提下,重新分配发动机和驱动电机扭矩,此时发动机输出扭矩按一定斜率增加到目标扭矩,驱动电机输出扭矩按一定斜率下降到目标扭矩,实现并联驱动。其中调速调扭过程如图10所示。
3. 性能表现
3.1 仿真验证
基于 Matlab/Simulink 平台,搭建混联式 PHEV 后向仿真模型,分析整车的动力性、经济性,并验证动力传动系统参数匹配以及能量管理策略的可行性。
以 GA3S-PHEV 为仿真车型,在动力性方面,最高车速为188 km/h,0~100 km/h加速时间为8.61 s;在经济型方面,选用 NEDC工况仿真计算条件B油耗,100 km油耗值为5.13 L。
3.2 传动效率实验
为验证动力性经济性仿真模型的准确性,以及基于效率最优制定的控制策略的合理性,搭建 G-MC 传动效率实验台架如图11所示,测试不同工况和入口油温下的传动效率,图12所示为其原理图。
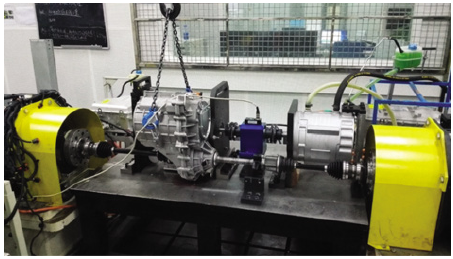
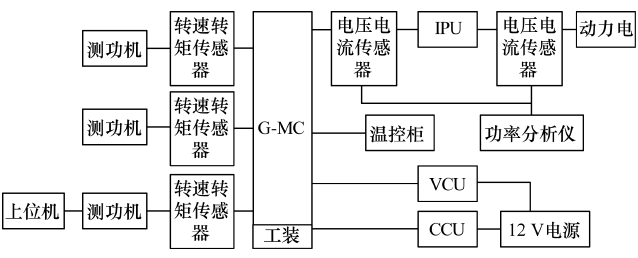
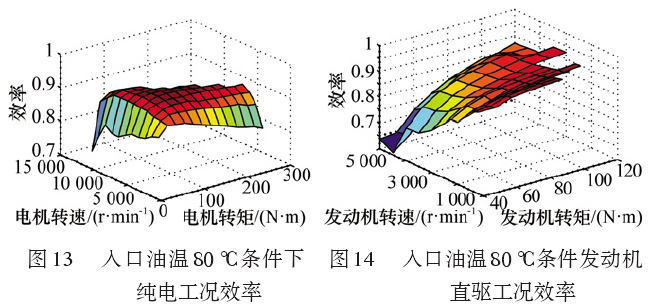
图13、图14 分别为入口油温80 ℃条件下纯电模式和发动机直驱模式传动效率图,以此为依据对动力性和经济性仿真结果进行修正,以保证仿真结果的真实性。
3.3 性能对比分析
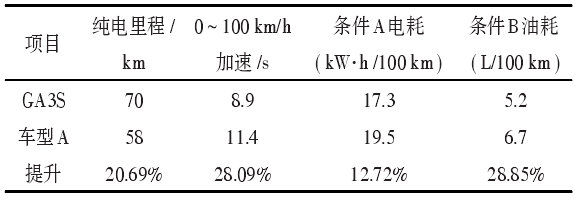
表1所示为搭载G-MC的GA3S-PHEV与当时在售的同类插电式轿车车型A的燃油经济性与动力性对比。在经济型方面,GA3S纯电续驶里程提高20.69%,条件A电耗和条件B油耗分别降低12.72%和28.85%;在动力性方面 ,0~100km/h加速时间缩短20.09%。可以说GA3S-PHEV在同类车型中其动力性、经济性方面具有明显的优势。
1. G-MC 系统方案
1.1 系统结构与参数
如图1所示,新能源汽车混合动力系统一般包括发动机、机电耦合机构、动力电池、整车控制器(VCU)、电机控制器(IPU)、耦合控制器(CCU) 等。
G-MC采用如图2所示的串并联式混合动力系统,该系统具备纯电动模式、混合驱动模式、串联增程模式、驻车发电等多种工作模式。机电耦合系统将发电机、驱动电机、离合器、传动系统及液压系统等集成在一个箱体内。
G-MC外形如图3所示。
1.2 驱动模式分析
该G-MC机电耦合系统可以实现多种驱动模式,包括纯电动模式、混合驱动模式、串联增程模式、驻车发电等多种工作模式。
当机电耦合系统中的离合器断开、发动机和发电机不提供动力输出时,G-MC工作在纯电模式。此时功率流由驱动电机经中间轴、主减速齿轮传递至车轮,功率流如图4所示。
纯电动模式主要工作在电量充足且轮端需求转矩不大的行驶工况下,其传动系统动力学模型如下所示:
当G-MC工作在串联增程模式时,离合器处于断开状态,发动机带动发电机发出电能,一部分能量通过发电机给电池充电,一部分给驱动电机供电,而驱动电机单独驱动整车。串联增程模式下功率流如图5所示。
串联增程模式主要工作在电池电量低或急加速需求扭矩较大的行驶工况,其传动系统动力学模型如下所示:
当离合器结合,耦合系统工作在混合驱动模式,该模式最大的特点是整车需求功率主要由发动机提供,不足的功率由驱动电机提供而多余的功率由发电机吸收,混合驱动模式下功率流如图6所示。
该模式下传动系统动力学模型如下所示:
2. G-MC控制策略
控制策略是耦合系统中至关重要的一部分,它包括模式划分、模式切换和功率分配控制策略。
其中模式划分控制策略主要是根据车辆的当前车速、转矩需求和当前 SOC,在各种驱动模式中选取最合适的工作模式;模式切换控制策略是通过协调控制动力源转速转矩与执行机构的工作状态,实现平稳且无动力中断的模式切换过程;而功率分配策略是耦合模式下对两个动力源的功率进行分配,从而实现最优系统效率提高整车经济型增加续驶里程。
2.1 模式划分
G-MC混合系统具有多个能量源和动力部件,可以工作在多种驱动模式。为使车辆在兼顾动力性的同时提升经济性,车辆驱动模式的选择至关重要。根据插电式混合动力汽车在运行过程中电池SOC变化情况,可将其运行模式划分为两个阶段,分别是:电量消耗(ChargeDepleting, CD) 阶段和电量维持(Charge Sustaining,CS)阶段。
在 CD 阶段,为了尽可能利用动力电池内存储的电量,车辆在纯电动模式下运行。仅当整车需求功率超过电池所能提供的最大功率后,发动机才启动,对整车的功率需求进行补充,以满足动力电池的不足。
随着汽车运行,电池 SOC 逐渐降低,当电池电量消耗到一定值后,进入CS阶段,此时耦合系统在纯电动、串联增程和并联模式之间进行切换,以保证SOC在一定区间内保持平衡。
因此,CS阶段的模式划分边界至关重要,本文首先基于系统效率最优得到初步的系统效率 (如图7所示,其中纯电模式效率计及串联模式平均发电效率)及模式划分边界,之后考虑实车中各种因素对边界进行修正,得到最终的模式边界如图8所示。
其中,在行驶模式的选择中额外考虑的因素如下:(1)整车各工况下电量的平衡;(2)驾驶员动力性需求;(3)系统经济性;(4)部件运行状态对模式选择的干预;(5)故障处理对模式选择的干预;(6)特殊情况下满足诊断仪的干预。
2.2 模式切换控制策略
模式切换控制策略是指串联增程模式和并联混动模式之间的切换过程控制。基于G-MC构型,通过协调发动机与双电机的工作点以及离合器的工作状态,可实现驱动模式之间的平顺且无动力中断切换。
以串联到并联的切换过程为例,切换过程流程如图9所示。
具体实现过程如下。
(1)在混合动力车辆行驶过程中,检测车速、动力电池电量和加速踏板位置作为进行离合器接合的判断条件。
(2)检测车辆是否满足以下条件:
①当前加速踏板位置下的车速是否高于预设值;
②电池电量是否处于预设值区域;
③各部件无影响离合器接合的故障。
(3)进入发动机调速模式,准备离合器接合,驱动电机继续输出扭矩维持车辆运行。
(4)以驱动电机转速为目标,采用PID控制调节发动机转速。
(5)继续检测发动机转数和驱动电机转速,当发动机转速与目标转速之间转速差小于设定值Δω,并维持一定时间T,离合器接合,车辆进入并联驱动模式。
(6) 在离合器接合上后,在总需求扭矩不变的前提下,重新分配发动机和驱动电机扭矩,此时发动机输出扭矩按一定斜率增加到目标扭矩,驱动电机输出扭矩按一定斜率下降到目标扭矩,实现并联驱动。其中调速调扭过程如图10所示。
3. 性能表现
3.1 仿真验证
基于 Matlab/Simulink 平台,搭建混联式 PHEV 后向仿真模型,分析整车的动力性、经济性,并验证动力传动系统参数匹配以及能量管理策略的可行性。
以 GA3S-PHEV 为仿真车型,在动力性方面,最高车速为188 km/h,0~100 km/h加速时间为8.61 s;在经济型方面,选用 NEDC工况仿真计算条件B油耗,100 km油耗值为5.13 L。
3.2 传动效率实验
为验证动力性经济性仿真模型的准确性,以及基于效率最优制定的控制策略的合理性,搭建 G-MC 传动效率实验台架如图11所示,测试不同工况和入口油温下的传动效率,图12所示为其原理图。
图13、图14 分别为入口油温80 ℃条件下纯电模式和发动机直驱模式传动效率图,以此为依据对动力性和经济性仿真结果进行修正,以保证仿真结果的真实性。
3.3 性能对比分析
表1所示为搭载G-MC的GA3S-PHEV与当时在售的同类插电式轿车车型A的燃油经济性与动力性对比。在经济型方面,GA3S纯电续驶里程提高20.69%,条件A电耗和条件B油耗分别降低12.72%和28.85%;在动力性方面 ,0~100km/h加速时间缩短20.09%。可以说GA3S-PHEV在同类车型中其动力性、经济性方面具有明显的优势。



编辑推荐




最新资讯
-
中汽中心工程院能量流测试设备上线全新专家
2025-04-03 08:46
-
上新|AutoHawk Extreme 横空出世-新一代实
2025-04-03 08:42
-
「智能座椅」东风日产N7为何敢称“百万级大
2025-04-03 08:31
-
基于加速度计补偿的俯仰角和路面坡度角估计
2025-04-03 08:30
-
《北京市自动驾驶汽车条例》正式实施 L3级
2025-04-02 20:23
