




 广告
广告





















































自动驾驶等级规范走到死胡同了吗?
2021-07-05 23:05:39· 来源:Astroys

5月初,SAE再次更新了J3016标准描述的自动驾驶级别(如下图)。在描述从人类到机器驱动车辆的过程中,没有任何分类法比J3016更知名或更广泛地被引用。技术在改善
5月初,SAE再次更新了J3016标准描述的自动驾驶级别(如下图)。在描述从人类到机器驱动车辆的过程中,没有任何分类法比J3016更知名或更广泛地被引用。
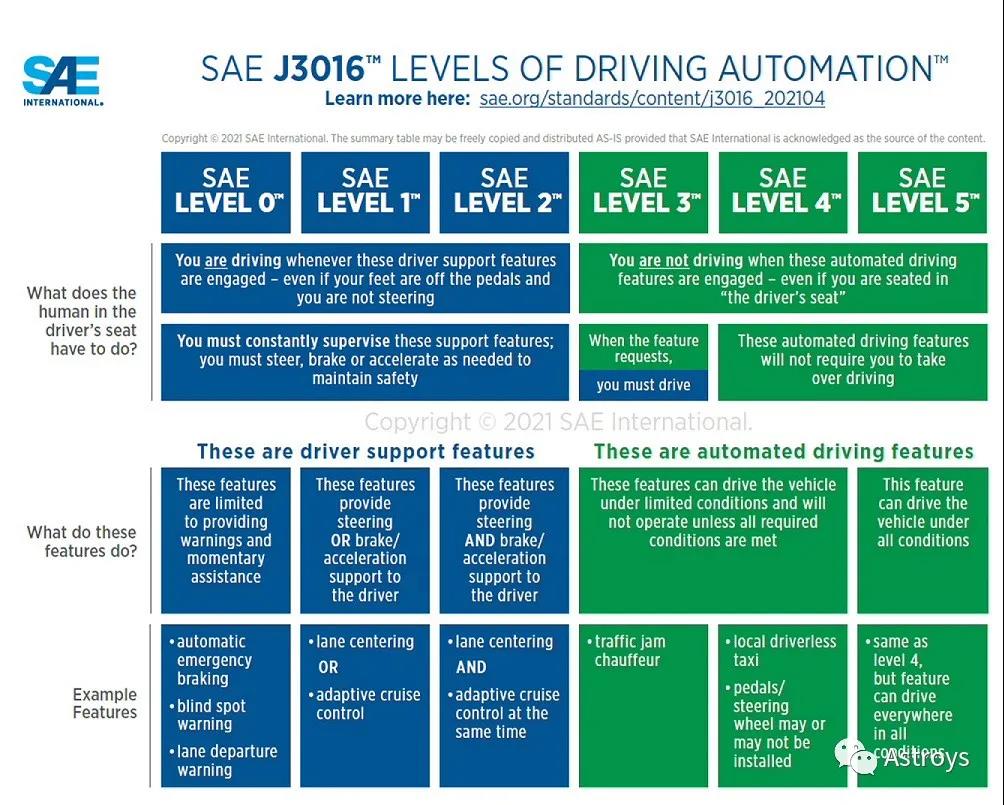
技术在改善公共道路安全方面有两个截然不同的作用。第一是让人类成为更安全的司机,另外则是取代人类成为司机。然而,这是两条完全独立的发展轨道,没有交集。
它们是平行的,而不是趋同的。
顺序编号系统(从0到5)的使用被广泛误解为J3016的一个级别会发展到下一个级别。事实并非如此。广义上讲,技术使人类驾驶者成为更安全的驾驶者,大致涵盖了从L0到L2的发展;技术取代人类作为驾驶者,则涵盖了L4和L5。
连续性的错觉出现在L3,即机器驾驶直到它不驾驶,然后人类被期望承担驾驶任务和法律责任。实际经验告诉我们,这是一个无稽之谈,无数的特斯拉司机试图欺骗自动驾驶的视频和数十年的人类因素研究证明,人类无法安全地履行这一责任。
无论有意还是无意,J3016已经被创业公司和颠覆者用为“向L5的竞赛”,导致人们普遍认为,随着“高级”自动驾驶的发展,“低级”自动驾驶的技术已经过时了。
这个结论是错误的。
我们可以看到这种说法的证据是,甚至没有一家估值超过10亿美元的公司正在开发AEB或基于视觉的DMS等成熟的安全技术。与此同时,Waymo最近又筹集了25亿美元,而投资者对几乎所有激光雷达的进展都垂涎三尺。
实际上,L5没有实际意义,L3在时速超过25英里时是不安全的,这意味着利用高水平的自动驾驶“拯救生命”的傲慢承诺现在完全落在了Waymo等开发L4公司们的肩上。
然而,Waymo最近又出现诸多状况。首席执行官John Krafcik和首席财务官Ger Dwyer离职,随后出现了Waymo的车辆无法在施工区处理雪糕筒的视频。
这就提出了一个问题,是否在主要供应商自信的外表下,开发自动驾驶技术的现实挑战是否比我们所相信的要难得多?让我们仔细看看。
还有很长的路要走
Waymo在识别雪糕筒方面其实没有问题,但它似乎有一个问题,即公共道路是一个复杂系统的例子。以前笔者写过关于复杂性理论所描述的不可预测性的文章,现在仍然不清楚使用全道路测试训练的机器学习软件如何能够现实地让机器在公共道路上比专注的人类更能安全地掌控不确定性。
未知、极端和罕见的事件被称为“边缘案例”。复杂性理论告诉我们,有无限多可能的事件组合。自动驾驶汽车中的机器学习感知系统必须经过训练,以了解其操作设计领域(ODD)内可能发生的情况。它在不熟悉的情况下会失败,就像Waymo在雪糕筒上失败一样。
Edge Case Research的联合创始人、CMU的工程教授Phil Koopman在一个关于现实世界中长尾部分布的视频中讨论了这些问题(见下文)。注意Koopman的结论:“人类擅长长尾事件”。

在另一个视频中,Koopman估计了验证自动驾驶技术安全案例所需的道路测试的数量,Waymo Driver就是其中一例。见下文,Koopman的分析是可能20亿英里左右。
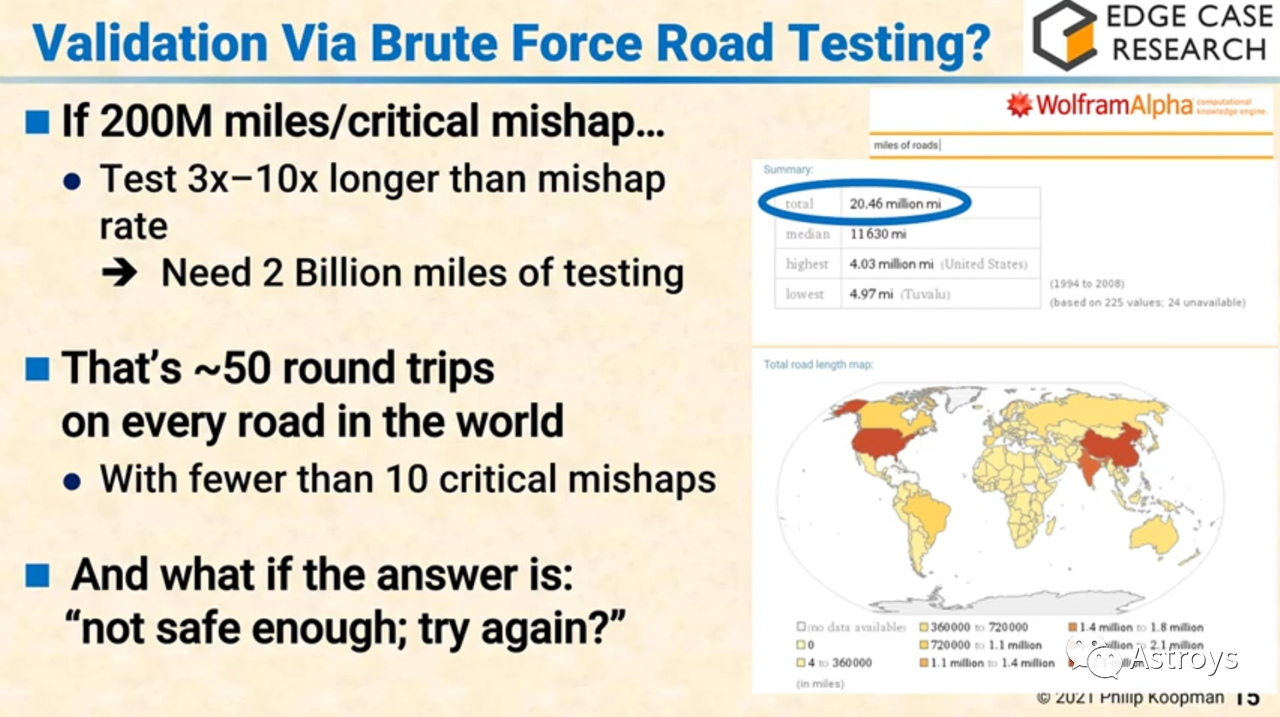
如果Waymo Driver自2009年以来在真实世界的道路上积累了超过2000万英里,那么这只相当于Koopman估计的必要距离的1%。对于所有超过L4的自动驾驶,这些计算意味着该技术需要更多的资金、时间和测试,然后供应商才有可能证明其安全性。
在这种情况下,我们介绍一下前路如何。
这一分析表明,还需要进行许多测试里程,促使我质疑L4供应商的投资者是否真正掌握了未来挑战的规模?是否有资金、耐心和胆量来完成这一旅程?
或者,J3016的自动驾驶技术的承诺是否无意中创造了历史上最长、最昂贵的死胡同?
Scooters、NHTSA和NCAP
今年2月,Waymo宣布将测试范围扩大到旧金山。在附带的博文中,该公司提到到。
“在交通状况糟糕原因调查时,63%的受访者指出危险的司机、74%的受访者指出停车、57%的受访者指出通勤压力大。令人担忧的是,近四分之一的人在旧金山的道路上根本没有安全感。”
当一辆Waymo测试车迅速与一名骑着scooter的行人相撞时,旧金山人的担忧可能并没有得到舒缓。在一份声明中,Waymo说:“自动驾驶专家最近将车辆从自动驾驶模式中脱离出来,当车辆进入十字路口并进行左转弯时,正在以手动模式行驶。转弯后,在仍处于手动模式时,车辆与一名骑scooter的人发生了接触。”
暂停一下,想想每辆Waymo测试车都配备了比所有私家车更多的传感器和处理器,但在手动(人类驾驶)模式下运行时,防撞技术甚至不足以防止与一辆scooter相撞。
我想知道,旧金山人现在有多担心?
几年来,Euro-NCAP已经为乘用车指定了AEB-VRU(Vulnerable Road User)功能。然而,旧金山事件意味着Waymo正在公共道路上部署测试车辆,这些车辆配备了手动模式的防撞技术,甚至不符合Euro-NCAP的标准,更不用说超过现行标准了。
为什么NHTSA没有发布指导方针,规定测试级AV在公共道路上以手动模式运行时的最低AEB性能标准?另外,为什么没有法规规定DMS的最低性能标准,以评估人类驾驶员的分心和疲劳?
这是两个明显的安全案例,但却被忽略了。
这可能是自动驾驶汽车测试和开发监管环境的第一个重大变化,立法者现在越来越多地质疑自动驾驶汽车行业的承诺,同时认真听取《消费者报告》和汽车安全中心等安全倡导团体的意见,这些团体正在推动成熟的车辆安全技术,如AEB、DMS和LDW系统成为强制性技术。
保持人类驾驶员的注意力和参与度是DMS的主要作用。AEB和LKS分别提供纵向速度辅助和横向车道支持。这些经过验证的车辆安全技术,在未来几十年里,看起来会比任何L3、L4或L5的“自动驾驶”技术拯救更多生命。
J3016标准虽然众所周知并被广泛引用,但也许不是那么有用。
[参考文章]
Is the Spec for Vehicle Automation Levels a Dead End? — Colin Barnden
技术在改善公共道路安全方面有两个截然不同的作用。第一是让人类成为更安全的司机,另外则是取代人类成为司机。然而,这是两条完全独立的发展轨道,没有交集。
它们是平行的,而不是趋同的。
顺序编号系统(从0到5)的使用被广泛误解为J3016的一个级别会发展到下一个级别。事实并非如此。广义上讲,技术使人类驾驶者成为更安全的驾驶者,大致涵盖了从L0到L2的发展;技术取代人类作为驾驶者,则涵盖了L4和L5。
连续性的错觉出现在L3,即机器驾驶直到它不驾驶,然后人类被期望承担驾驶任务和法律责任。实际经验告诉我们,这是一个无稽之谈,无数的特斯拉司机试图欺骗自动驾驶的视频和数十年的人类因素研究证明,人类无法安全地履行这一责任。
无论有意还是无意,J3016已经被创业公司和颠覆者用为“向L5的竞赛”,导致人们普遍认为,随着“高级”自动驾驶的发展,“低级”自动驾驶的技术已经过时了。
这个结论是错误的。
我们可以看到这种说法的证据是,甚至没有一家估值超过10亿美元的公司正在开发AEB或基于视觉的DMS等成熟的安全技术。与此同时,Waymo最近又筹集了25亿美元,而投资者对几乎所有激光雷达的进展都垂涎三尺。
实际上,L5没有实际意义,L3在时速超过25英里时是不安全的,这意味着利用高水平的自动驾驶“拯救生命”的傲慢承诺现在完全落在了Waymo等开发L4公司们的肩上。
然而,Waymo最近又出现诸多状况。首席执行官John Krafcik和首席财务官Ger Dwyer离职,随后出现了Waymo的车辆无法在施工区处理雪糕筒的视频。
这就提出了一个问题,是否在主要供应商自信的外表下,开发自动驾驶技术的现实挑战是否比我们所相信的要难得多?让我们仔细看看。
还有很长的路要走
Waymo在识别雪糕筒方面其实没有问题,但它似乎有一个问题,即公共道路是一个复杂系统的例子。以前笔者写过关于复杂性理论所描述的不可预测性的文章,现在仍然不清楚使用全道路测试训练的机器学习软件如何能够现实地让机器在公共道路上比专注的人类更能安全地掌控不确定性。
未知、极端和罕见的事件被称为“边缘案例”。复杂性理论告诉我们,有无限多可能的事件组合。自动驾驶汽车中的机器学习感知系统必须经过训练,以了解其操作设计领域(ODD)内可能发生的情况。它在不熟悉的情况下会失败,就像Waymo在雪糕筒上失败一样。
Edge Case Research的联合创始人、CMU的工程教授Phil Koopman在一个关于现实世界中长尾部分布的视频中讨论了这些问题(见下文)。注意Koopman的结论:“人类擅长长尾事件”。
在另一个视频中,Koopman估计了验证自动驾驶技术安全案例所需的道路测试的数量,Waymo Driver就是其中一例。见下文,Koopman的分析是可能20亿英里左右。
如果Waymo Driver自2009年以来在真实世界的道路上积累了超过2000万英里,那么这只相当于Koopman估计的必要距离的1%。对于所有超过L4的自动驾驶,这些计算意味着该技术需要更多的资金、时间和测试,然后供应商才有可能证明其安全性。
在这种情况下,我们介绍一下前路如何。
这一分析表明,还需要进行许多测试里程,促使我质疑L4供应商的投资者是否真正掌握了未来挑战的规模?是否有资金、耐心和胆量来完成这一旅程?
或者,J3016的自动驾驶技术的承诺是否无意中创造了历史上最长、最昂贵的死胡同?
Scooters、NHTSA和NCAP
今年2月,Waymo宣布将测试范围扩大到旧金山。在附带的博文中,该公司提到到。
“在交通状况糟糕原因调查时,63%的受访者指出危险的司机、74%的受访者指出停车、57%的受访者指出通勤压力大。令人担忧的是,近四分之一的人在旧金山的道路上根本没有安全感。”
当一辆Waymo测试车迅速与一名骑着scooter的行人相撞时,旧金山人的担忧可能并没有得到舒缓。在一份声明中,Waymo说:“自动驾驶专家最近将车辆从自动驾驶模式中脱离出来,当车辆进入十字路口并进行左转弯时,正在以手动模式行驶。转弯后,在仍处于手动模式时,车辆与一名骑scooter的人发生了接触。”
暂停一下,想想每辆Waymo测试车都配备了比所有私家车更多的传感器和处理器,但在手动(人类驾驶)模式下运行时,防撞技术甚至不足以防止与一辆scooter相撞。
我想知道,旧金山人现在有多担心?
几年来,Euro-NCAP已经为乘用车指定了AEB-VRU(Vulnerable Road User)功能。然而,旧金山事件意味着Waymo正在公共道路上部署测试车辆,这些车辆配备了手动模式的防撞技术,甚至不符合Euro-NCAP的标准,更不用说超过现行标准了。
为什么NHTSA没有发布指导方针,规定测试级AV在公共道路上以手动模式运行时的最低AEB性能标准?另外,为什么没有法规规定DMS的最低性能标准,以评估人类驾驶员的分心和疲劳?
这是两个明显的安全案例,但却被忽略了。
这可能是自动驾驶汽车测试和开发监管环境的第一个重大变化,立法者现在越来越多地质疑自动驾驶汽车行业的承诺,同时认真听取《消费者报告》和汽车安全中心等安全倡导团体的意见,这些团体正在推动成熟的车辆安全技术,如AEB、DMS和LDW系统成为强制性技术。
保持人类驾驶员的注意力和参与度是DMS的主要作用。AEB和LKS分别提供纵向速度辅助和横向车道支持。这些经过验证的车辆安全技术,在未来几十年里,看起来会比任何L3、L4或L5的“自动驾驶”技术拯救更多生命。
J3016标准虽然众所周知并被广泛引用,但也许不是那么有用。
[参考文章]
Is the Spec for Vehicle Automation Levels a Dead End? — Colin Barnden



编辑推荐




最新资讯
-
全国汽车标准化技术委员会汽车节能分技术委
2025-04-18 17:34
-
我国联合牵头由DC/DC变换器供电的低压电气
2025-04-18 17:33
-
中国汽研牵头的首个ITU-T国际标准正式立项
2025-04-18 17:32
-
为什么要进行汽车以太网接收测试?汽车以太
2025-04-18 17:26
-
产品手册下载 | NI 全新USB数据采集-NI mio
2025-04-18 16:39
