




 广告
广告





















































朱西产:5G车联网助力自动驾驶汽车产品落地,促进中国汽车产业变革
2021-07-09 22:47:15· 来源:Apollo智能驾驶

近日,清华大学智能产业研究院(AIR)与百度Apollo联合举办发布会,正式推出全球首份车路协同技术创新白皮书《面向自动驾驶的车路协同关键技术与展望》。同时,
近日,清华大学智能产业研究院(AIR)与百度Apollo联合举办发布会,正式推出全球首份车路协同技术创新白皮书《面向自动驾驶的车路协同关键技术与展望》。同时,邀请了政界、学界、产业界的众多专家出席,围绕车路协同发展现状,车路协同对于自动驾驶安全性、产业价值进行深度解读,共话车路协同产业的长远发展。
发布会现场,同济大学汽车安全研究所所长朱西产以《5G车联网助力自动驾驶汽车产品落地》为主题发表演讲。朱西产教授分析了5G技术对于自动驾驶领域的重要意义,并就自动驾驶领域的安全问题和L4级无人驾驶如何落地提供重要观点。
朱西产教授强调,真正达到L3级以上才能称为自动驾驶,这也是当前产业发展的关键。由于第三类未知的不安全场景的存在,L3级以上高等自动驾驶非常难实现。得益于5G技术的发展,中国开创性地提出通过基于车路云协同的智能网联平台来实现高等级自动驾驶。然而,这也带来了一个挑战——自动驾驶车路协同产业的落地,需要得到来自产业、企业以及政府的共同支持。若要在自动驾驶领域和汽车产业变革的竞争中脱颖而出,中国还必须自主创新,掌握动力电池、芯片、软件这三项核心技术,才能使中国汽车“由大变强”。
内容要点
1 对于车联网,5G是一个革命性的变革
在智能手机领域,5G技术的应用并没有我们想象中那么迫切。但是,在汽车和车联网领域,5G是一个革命性的变革。过去4G时代的车联网仅能用于信息服务,而5G则有可能使车联网从仅仅是信息服务的这种辅助方式变成一个“车-路-云”联在一起的云控平台。为什么要联在一起?为了自动驾驶。
在今年上海车展上,很多企业表示可以销售自动驾驶汽车了。也许你会疑惑:自动驾驶有那么难吗?然而,答案是肯定的。
2 自动驾驶的安全性和预期功能安全
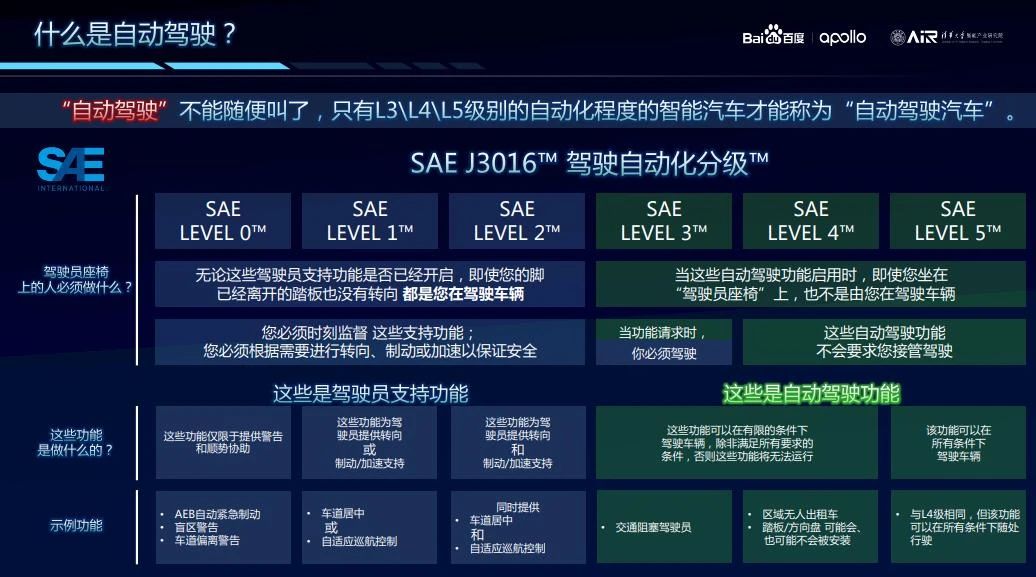
根据SAE J3016驾驶自动化分级标准,L2以下只是辅助驾驶,L3以上的级别才能称为自动驾驶。如今,全球智能行业对智能汽车的定义存在模糊区。在销售时,企业把不需要政府认可、不需要专门管理的辅助级驾驶系统称为自动驾驶系统,并用“self-driving”等名词进行宣传,这暗示了汽车的自动驾驶能力。针对这个问题,今年欧洲新车安全评鉴协会Euro NCAP正在制定新的评价方法。目前在市场上可以销售的都是辅助级驾驶产品,以后在欧洲销售有自动驾驶功能的汽车,如果产品没有注明“辅助驾驶”这个关键词,这个机构就要对安全评级进行扣分。
在本次发布的白皮书中,所谈及的高等级自动驾驶是指SAE J3016中的L3、L4级。为什么L3、L4高等级自动驾驶难以实现?这主要关乎预期功能安全。
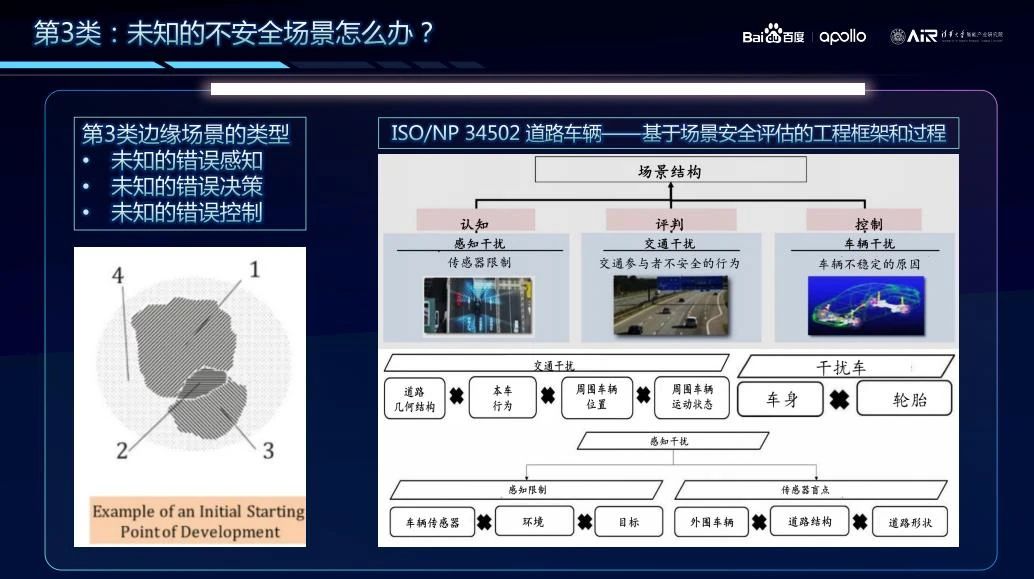
第一,在ODD(车辆运行设计域)内的场景中,有一类场景叫做第三类场景,即未知的不安全场景或边缘场景。
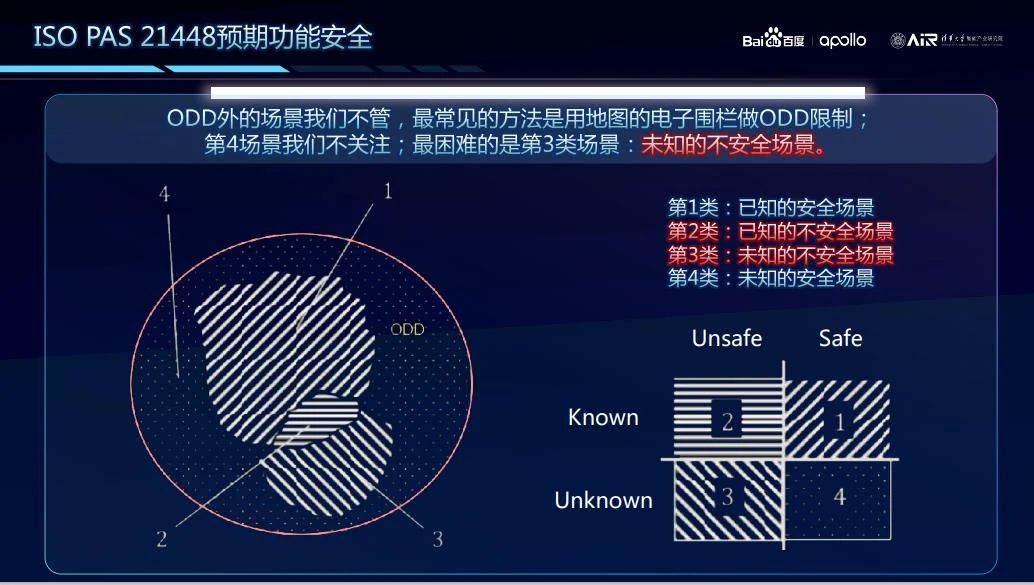
在这种场景中,自动驾驶汽车无法识别危险物,便不会刹车,进而造成类似2016年邯郸特斯拉车辆事故等问题。因此,自动驾驶出现了一个难题——如何找出所有“未知”和“不安全”的场景。在这种场景中,主要包括未知的错误感知、未知的错误决策、未知的错误控制;未知的错误感知是最常见的。为此,全世界所有产业链都在致力于做出自动驾驶汽车开发过程中的完整场景,并且上升到ISO标准,由国际标准作出场景库。
第二,由于未知的不安全场景的存在,L3、L4的落地非常困难,自动驾驶的安全问题存在长尾效应。如果通过“事故”去识别“未知”,难度非常大,甚至会付出生命的代价。同时,因为企业必须通过量产汽车的变现来支持研发,所以现在市场上的高等级自动驾驶车都落地到L2。原本按照L3搭建的技术构架车型过度到L2+,按照L4搭建的技术架构车型过度到L2++,两者最大的差别在于地图。原来辅助驾驶系统的自动驾驶功能是没有地图的,L3会使用车道级的地图,L4要用厘米级定位的地图。但是,不能忽悠、误导消费者的是,L2+和L2++都只是辅助驾驶,不管它多么先进,也没有完全解决第三类未知的不安全场景,人类驾驶员仍需要关注这种边缘场景,以便时地接管控制,保证安全。

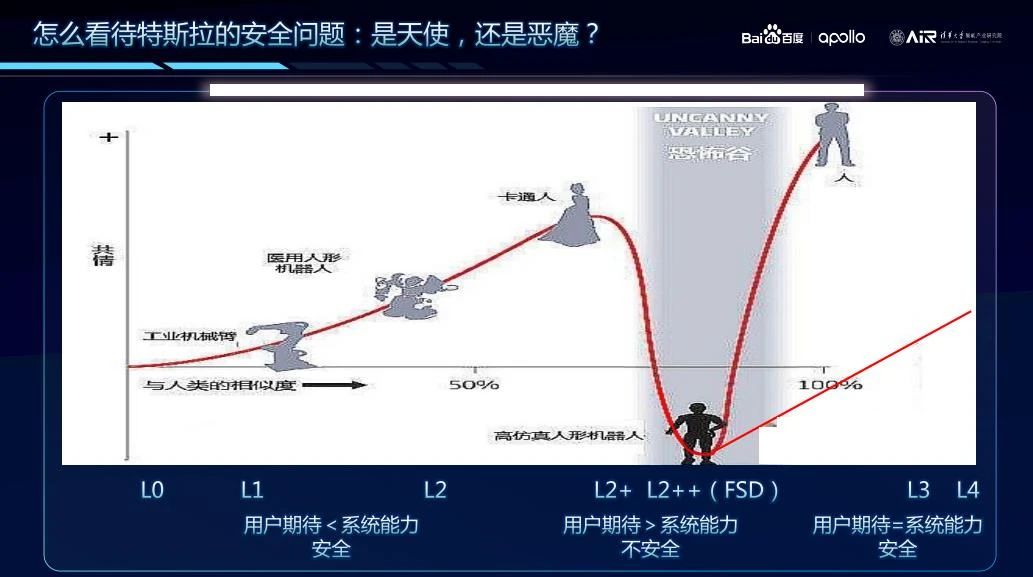
目前,在全世界水平比较高的辅助级驾驶系统中,L2+这种系统做的最好是特斯拉,特斯拉在量产级的水平里面,自动驾驶水平是最高的。然而,技术水平最高的量产车却遇到了安全,甚至遭遇“恐怖谷”。为什么技术系统更高的汽车反而不安全呢?这主要是因为用户对系统能力的期待过高。L2级以下的车虽然系统能力很差,但是相应的用户期待也很低,这样反而安全。L2+、L2++汽车在大部分正常的行驶中自动驾驶能力高,让用户产生很高的期待,甚至误以为不需要人为控制、可以脱离驾驶。因此,在遇到边缘场景时,驾驶员因完全脱离驾驶而不能及时干预,导致交通事故,甚至车毁人亡,进而进入了恐怖状态。
3 如何实现真正的L3、L4级自动驾驶?
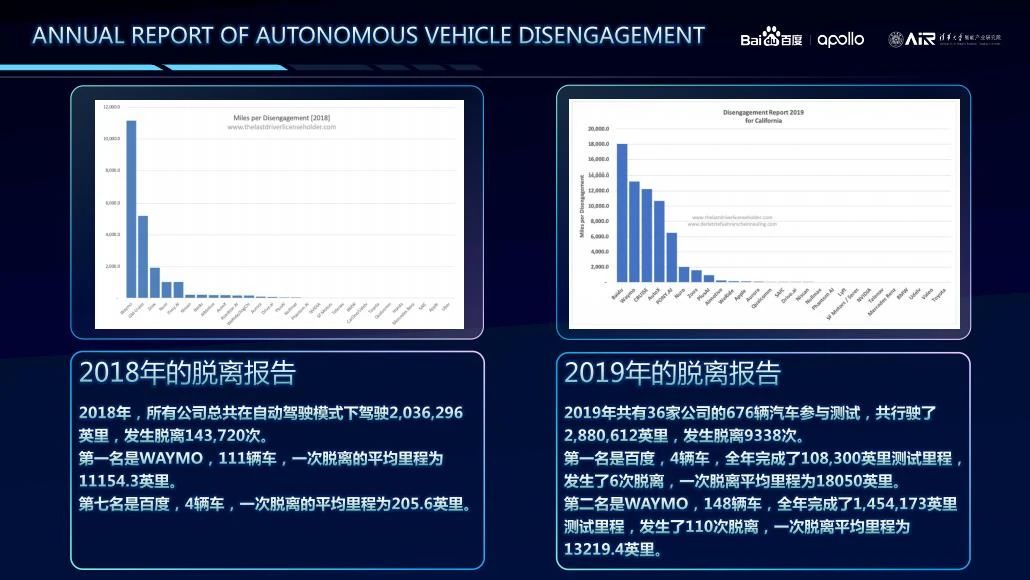
那么,要实现真正的L3、L4自动驾驶,让用户期待得到系统能力的支持?从技术上,若要让车自身的技术解决所有场景问题,在所有场景下都能安全自动驾驶,单车智能是非常必要的,否则即便加上车路云的协同也没用。根据美国的单车智能脱离报告显示,近几年单车智能发展极快,2019年百度的一次脱离平均历程已达到18050英里,即3万多公里才需要一次人工接入。并且,头部企业与后部企业实力相差非常悬殊,听起来非常鼓舞人心。然而,从安全角度来评价,这相当于行驶3万多公里汽车就会出一次事故,连人类驾驶的水平都达不到,这样的单车智能是无法投入实际使用的。
想要突破这个问题,需要走出一条与欧美日不同的道路,构建汽车社会新生态,全面实现产业的超越。第一,面向乘用车的路径。强调驾驶员的作用,不让其脱离驾驶,以处理第三类未知的不安全场景。第二,面向商业运营的路径。商业运营的自动驾驶需要达到L4级,若按照脱离报告的思路来看,单车智能是无法达到的。因此,清华大学团队最早提出了车路云一体化的智能网联理念。目前,北京亦庄高级别自动驾驶示范区已经有车路协同的无人驾驶的落地。
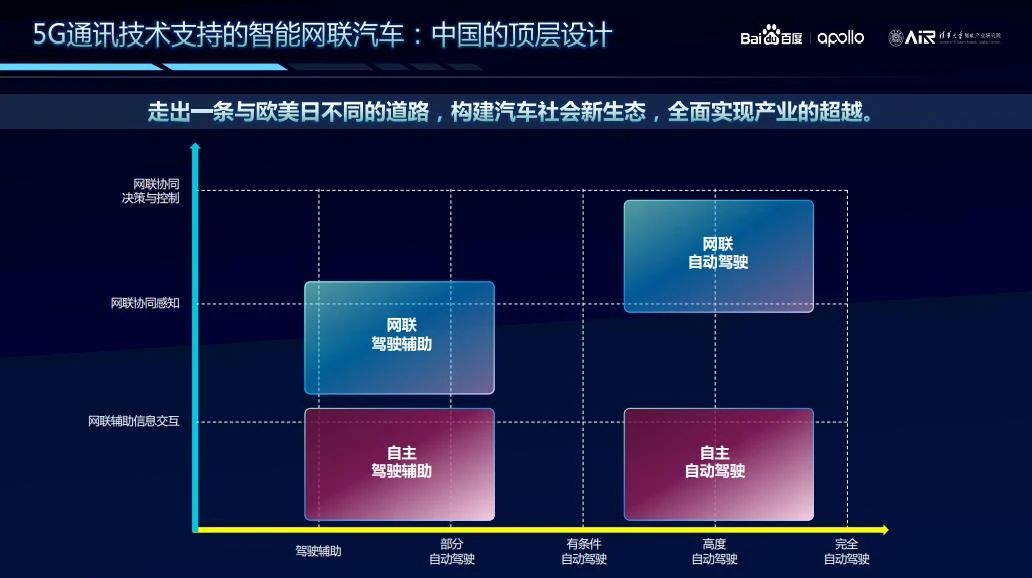
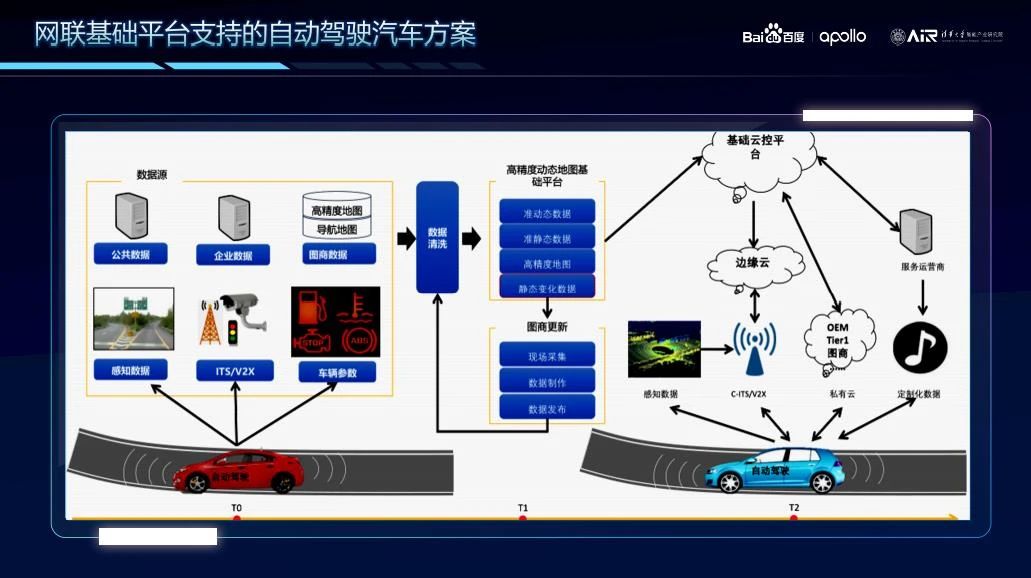
智能网联的基础当然是5G。如果没有5G技术,车联网只能做信息服务,而不能变成一个车路云一体化的网联云控平台。中国是全球第一个提出通过基于车路云协同的智能网联平台来实现高等级自动驾驶的国家。从E/E电子电气构架角度来看,则需要转变为车云联控的状态。也就是说,从系统控制到软件,车云要联合,车路云要协同。
4 L4无人驾驶如何落地?
第一,在技术上,实现少人化。车路协同要将“人-车-路-云”转变为“车-路-云-人”,驾驶安全员转为后台的监管安全员,降低人力和资金成本。在后台上,一个人可以监管多辆汽车,并在测试中不断提升自动化水平。当边缘场景极少、一个人甚至可以监管一百辆车,就说明可以投入商用了。
车路协同技术为L4无人驾驶商业运营提供落地条件,仿真平台则变身为无人驾驶商业落地的云端平台。无人驾驶运营车辆后台管控平台的功能:一是融合路端感知系统和运营车辆环境感知数据进行高精度地图的动态更新,二是对运营车辆规划路线的运营管理进行评估,确定运营车辆是否能够安全运营。

基于这个云端平台,无人驾驶拥有了路端感知,车内拥有上帝视角般的超视野支持,这非常利于减少边缘场景。同时,实现了少人化,后台监管安全员可以一个人监管多辆车。因此,L3、L4高等级自动驾驶不仅有了L2+、L2++的方案,还可以提供真正的无人驾驶的落地方案。
第二,政府做好顶层设计,构建一个良好生态。与过去的单车智能不同的是,车路协同的发展需要交通、汽车和通讯三个行业的合作支持,这时就需要政府来协调,解决相互掣肘等问题。这次白皮书的发布,就充分体现了各方力量的高度配合。清华大学为“车-路-云”网联智能的提出者,百度为该理念的倡导者和行动者,北京亦庄开发区充当了产业和政府之间的桥梁,中国政府则发挥的是整体优势,通过政府的顶层设计让各行业达成共识。同时,这份白皮书也为政府的决策提供思路和依据。基于这样的协作关系,车路协同技术的发展获得良好的推动力,也许我们可以更早地看到智能网联汽车的落地。
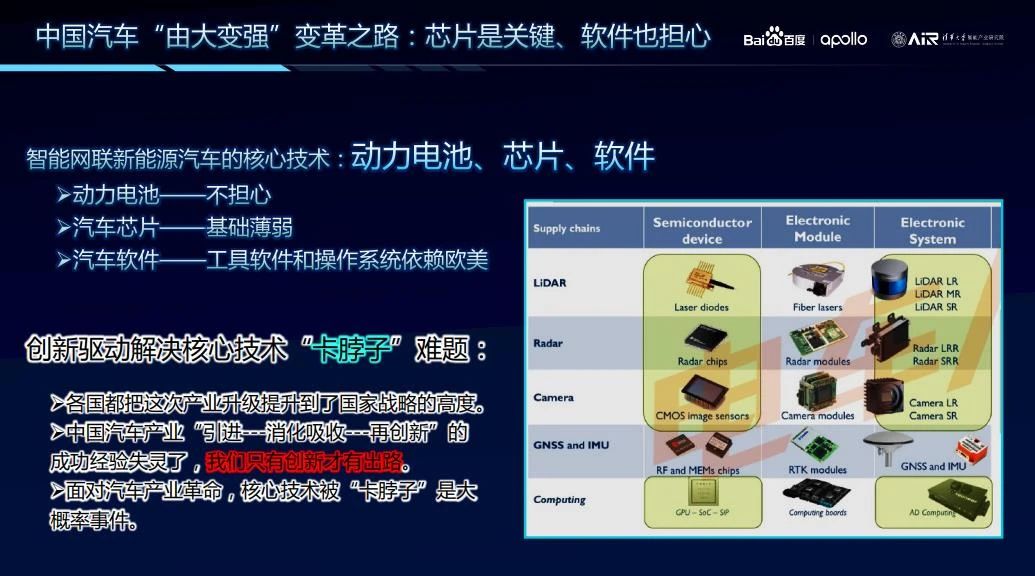
第三,中国汽车“由大变强”的变革之路,必须通过自主创新来探索出路。如今,各国都把汽车产业革命升级到了国家战略层面,而中国汽车“引进-消化吸收-再创新”的成功经验失灵了,现在只有创新才有出路。面对汽车产业革命,核心技术被“卡脖子”是大概率事件。关于动力电池、芯片、软件这三项核心技术,动力电池技术无需担心,需要关注的是后两者。中国汽车芯片技术基础薄弱,软件方面依赖欧美,而软件必须形成新的生态。
更值得一提的是,无人驾驶越快落地就更可能在竞争中脱颖出,而技术革命的速度可能超出我们的想象。从1900年诞生第一辆汽车后,汽车代替了马车用了13年,那么无人驾驶汽车代替人类驾驶汽车的局面也将会在二三十年后出现。
关于纯电动无人驾驶汽车的梦想,早在1956年就有相关专利,却受限于当时的技术而无法实现。今天,在5G、人工智能、新能源三大技术革命的推动下,无人驾驶的纯电动汽车的梦想是有可能实现的,所以第四代无线技术推动的移动互联网革命也正在进行中。随着移动互联网的到来,清华AIR和百度Apollo联合发布的这部白皮书既可以让全行业达成共识,同时也可以为政府部门出谋划策,形成产业政策参考,促进产业革命的到来。
发布会现场,同济大学汽车安全研究所所长朱西产以《5G车联网助力自动驾驶汽车产品落地》为主题发表演讲。朱西产教授分析了5G技术对于自动驾驶领域的重要意义,并就自动驾驶领域的安全问题和L4级无人驾驶如何落地提供重要观点。
朱西产教授强调,真正达到L3级以上才能称为自动驾驶,这也是当前产业发展的关键。由于第三类未知的不安全场景的存在,L3级以上高等自动驾驶非常难实现。得益于5G技术的发展,中国开创性地提出通过基于车路云协同的智能网联平台来实现高等级自动驾驶。然而,这也带来了一个挑战——自动驾驶车路协同产业的落地,需要得到来自产业、企业以及政府的共同支持。若要在自动驾驶领域和汽车产业变革的竞争中脱颖而出,中国还必须自主创新,掌握动力电池、芯片、软件这三项核心技术,才能使中国汽车“由大变强”。
内容要点
1 对于车联网,5G是一个革命性的变革
在智能手机领域,5G技术的应用并没有我们想象中那么迫切。但是,在汽车和车联网领域,5G是一个革命性的变革。过去4G时代的车联网仅能用于信息服务,而5G则有可能使车联网从仅仅是信息服务的这种辅助方式变成一个“车-路-云”联在一起的云控平台。为什么要联在一起?为了自动驾驶。
在今年上海车展上,很多企业表示可以销售自动驾驶汽车了。也许你会疑惑:自动驾驶有那么难吗?然而,答案是肯定的。
2 自动驾驶的安全性和预期功能安全
根据SAE J3016驾驶自动化分级标准,L2以下只是辅助驾驶,L3以上的级别才能称为自动驾驶。如今,全球智能行业对智能汽车的定义存在模糊区。在销售时,企业把不需要政府认可、不需要专门管理的辅助级驾驶系统称为自动驾驶系统,并用“self-driving”等名词进行宣传,这暗示了汽车的自动驾驶能力。针对这个问题,今年欧洲新车安全评鉴协会Euro NCAP正在制定新的评价方法。目前在市场上可以销售的都是辅助级驾驶产品,以后在欧洲销售有自动驾驶功能的汽车,如果产品没有注明“辅助驾驶”这个关键词,这个机构就要对安全评级进行扣分。
在本次发布的白皮书中,所谈及的高等级自动驾驶是指SAE J3016中的L3、L4级。为什么L3、L4高等级自动驾驶难以实现?这主要关乎预期功能安全。
第一,在ODD(车辆运行设计域)内的场景中,有一类场景叫做第三类场景,即未知的不安全场景或边缘场景。
在这种场景中,自动驾驶汽车无法识别危险物,便不会刹车,进而造成类似2016年邯郸特斯拉车辆事故等问题。因此,自动驾驶出现了一个难题——如何找出所有“未知”和“不安全”的场景。在这种场景中,主要包括未知的错误感知、未知的错误决策、未知的错误控制;未知的错误感知是最常见的。为此,全世界所有产业链都在致力于做出自动驾驶汽车开发过程中的完整场景,并且上升到ISO标准,由国际标准作出场景库。
第二,由于未知的不安全场景的存在,L3、L4的落地非常困难,自动驾驶的安全问题存在长尾效应。如果通过“事故”去识别“未知”,难度非常大,甚至会付出生命的代价。同时,因为企业必须通过量产汽车的变现来支持研发,所以现在市场上的高等级自动驾驶车都落地到L2。原本按照L3搭建的技术构架车型过度到L2+,按照L4搭建的技术架构车型过度到L2++,两者最大的差别在于地图。原来辅助驾驶系统的自动驾驶功能是没有地图的,L3会使用车道级的地图,L4要用厘米级定位的地图。但是,不能忽悠、误导消费者的是,L2+和L2++都只是辅助驾驶,不管它多么先进,也没有完全解决第三类未知的不安全场景,人类驾驶员仍需要关注这种边缘场景,以便时地接管控制,保证安全。
目前,在全世界水平比较高的辅助级驾驶系统中,L2+这种系统做的最好是特斯拉,特斯拉在量产级的水平里面,自动驾驶水平是最高的。然而,技术水平最高的量产车却遇到了安全,甚至遭遇“恐怖谷”。为什么技术系统更高的汽车反而不安全呢?这主要是因为用户对系统能力的期待过高。L2级以下的车虽然系统能力很差,但是相应的用户期待也很低,这样反而安全。L2+、L2++汽车在大部分正常的行驶中自动驾驶能力高,让用户产生很高的期待,甚至误以为不需要人为控制、可以脱离驾驶。因此,在遇到边缘场景时,驾驶员因完全脱离驾驶而不能及时干预,导致交通事故,甚至车毁人亡,进而进入了恐怖状态。
3 如何实现真正的L3、L4级自动驾驶?
那么,要实现真正的L3、L4自动驾驶,让用户期待得到系统能力的支持?从技术上,若要让车自身的技术解决所有场景问题,在所有场景下都能安全自动驾驶,单车智能是非常必要的,否则即便加上车路云的协同也没用。根据美国的单车智能脱离报告显示,近几年单车智能发展极快,2019年百度的一次脱离平均历程已达到18050英里,即3万多公里才需要一次人工接入。并且,头部企业与后部企业实力相差非常悬殊,听起来非常鼓舞人心。然而,从安全角度来评价,这相当于行驶3万多公里汽车就会出一次事故,连人类驾驶的水平都达不到,这样的单车智能是无法投入实际使用的。
想要突破这个问题,需要走出一条与欧美日不同的道路,构建汽车社会新生态,全面实现产业的超越。第一,面向乘用车的路径。强调驾驶员的作用,不让其脱离驾驶,以处理第三类未知的不安全场景。第二,面向商业运营的路径。商业运营的自动驾驶需要达到L4级,若按照脱离报告的思路来看,单车智能是无法达到的。因此,清华大学团队最早提出了车路云一体化的智能网联理念。目前,北京亦庄高级别自动驾驶示范区已经有车路协同的无人驾驶的落地。
智能网联的基础当然是5G。如果没有5G技术,车联网只能做信息服务,而不能变成一个车路云一体化的网联云控平台。中国是全球第一个提出通过基于车路云协同的智能网联平台来实现高等级自动驾驶的国家。从E/E电子电气构架角度来看,则需要转变为车云联控的状态。也就是说,从系统控制到软件,车云要联合,车路云要协同。
4 L4无人驾驶如何落地?
第一,在技术上,实现少人化。车路协同要将“人-车-路-云”转变为“车-路-云-人”,驾驶安全员转为后台的监管安全员,降低人力和资金成本。在后台上,一个人可以监管多辆汽车,并在测试中不断提升自动化水平。当边缘场景极少、一个人甚至可以监管一百辆车,就说明可以投入商用了。
车路协同技术为L4无人驾驶商业运营提供落地条件,仿真平台则变身为无人驾驶商业落地的云端平台。无人驾驶运营车辆后台管控平台的功能:一是融合路端感知系统和运营车辆环境感知数据进行高精度地图的动态更新,二是对运营车辆规划路线的运营管理进行评估,确定运营车辆是否能够安全运营。
基于这个云端平台,无人驾驶拥有了路端感知,车内拥有上帝视角般的超视野支持,这非常利于减少边缘场景。同时,实现了少人化,后台监管安全员可以一个人监管多辆车。因此,L3、L4高等级自动驾驶不仅有了L2+、L2++的方案,还可以提供真正的无人驾驶的落地方案。
第二,政府做好顶层设计,构建一个良好生态。与过去的单车智能不同的是,车路协同的发展需要交通、汽车和通讯三个行业的合作支持,这时就需要政府来协调,解决相互掣肘等问题。这次白皮书的发布,就充分体现了各方力量的高度配合。清华大学为“车-路-云”网联智能的提出者,百度为该理念的倡导者和行动者,北京亦庄开发区充当了产业和政府之间的桥梁,中国政府则发挥的是整体优势,通过政府的顶层设计让各行业达成共识。同时,这份白皮书也为政府的决策提供思路和依据。基于这样的协作关系,车路协同技术的发展获得良好的推动力,也许我们可以更早地看到智能网联汽车的落地。
第三,中国汽车“由大变强”的变革之路,必须通过自主创新来探索出路。如今,各国都把汽车产业革命升级到了国家战略层面,而中国汽车“引进-消化吸收-再创新”的成功经验失灵了,现在只有创新才有出路。面对汽车产业革命,核心技术被“卡脖子”是大概率事件。关于动力电池、芯片、软件这三项核心技术,动力电池技术无需担心,需要关注的是后两者。中国汽车芯片技术基础薄弱,软件方面依赖欧美,而软件必须形成新的生态。
更值得一提的是,无人驾驶越快落地就更可能在竞争中脱颖出,而技术革命的速度可能超出我们的想象。从1900年诞生第一辆汽车后,汽车代替了马车用了13年,那么无人驾驶汽车代替人类驾驶汽车的局面也将会在二三十年后出现。
关于纯电动无人驾驶汽车的梦想,早在1956年就有相关专利,却受限于当时的技术而无法实现。今天,在5G、人工智能、新能源三大技术革命的推动下,无人驾驶的纯电动汽车的梦想是有可能实现的,所以第四代无线技术推动的移动互联网革命也正在进行中。随着移动互联网的到来,清华AIR和百度Apollo联合发布的这部白皮书既可以让全行业达成共识,同时也可以为政府部门出谋划策,形成产业政策参考,促进产业革命的到来。



编辑推荐




最新资讯
-
全国汽车标准化技术委员会汽车节能分技术委
2025-04-18 17:34
-
我国联合牵头由DC/DC变换器供电的低压电气
2025-04-18 17:33
-
中国汽研牵头的首个ITU-T国际标准正式立项
2025-04-18 17:32
-
为什么要进行汽车以太网接收测试?汽车以太
2025-04-18 17:26
-
产品手册下载 | NI 全新USB数据采集-NI mio
2025-04-18 16:39
