




 广告
广告





















































宝马7系智能驾驶及整车电子电气架构
2021-07-14 22:55:25· 来源:旺材汽车电子

宝马7系整合主动车距定速控制系统、主动车道维持辅助、拥塞交通辅助系统、车侧防撞辅助、前方车流警示、路口车流防撞辅助、闪避转向辅助等功能,使驾驶可以在不
宝马7系整合主动车距定速控制系统、主动车道维持辅助、拥塞交通辅助系统、车侧防撞辅助、前方车流警示、路口车流防撞辅助、闪避转向辅助等功能,使驾驶可以在不需控制油门的情况下跟前车维持距离,并且能在偏离车道时自动修正方向盘将车辆导回正常路线,甚至还可侦测前方车流与路口车流,主动介入控制制动及转向来避免碰撞危险。2016款7系轿车将支持远程遥控停车/出车位。
2.1 车道偏离警告系统
通过车道偏离警告系统识别出偏离车道情况,借助振荡执行机构产生相应方向盘振动,并通过相应警告灯发出车外后视镜内的视觉警告时触发,车速范围在70~210km/h。车道偏离警告系统原理框图如图9所示。
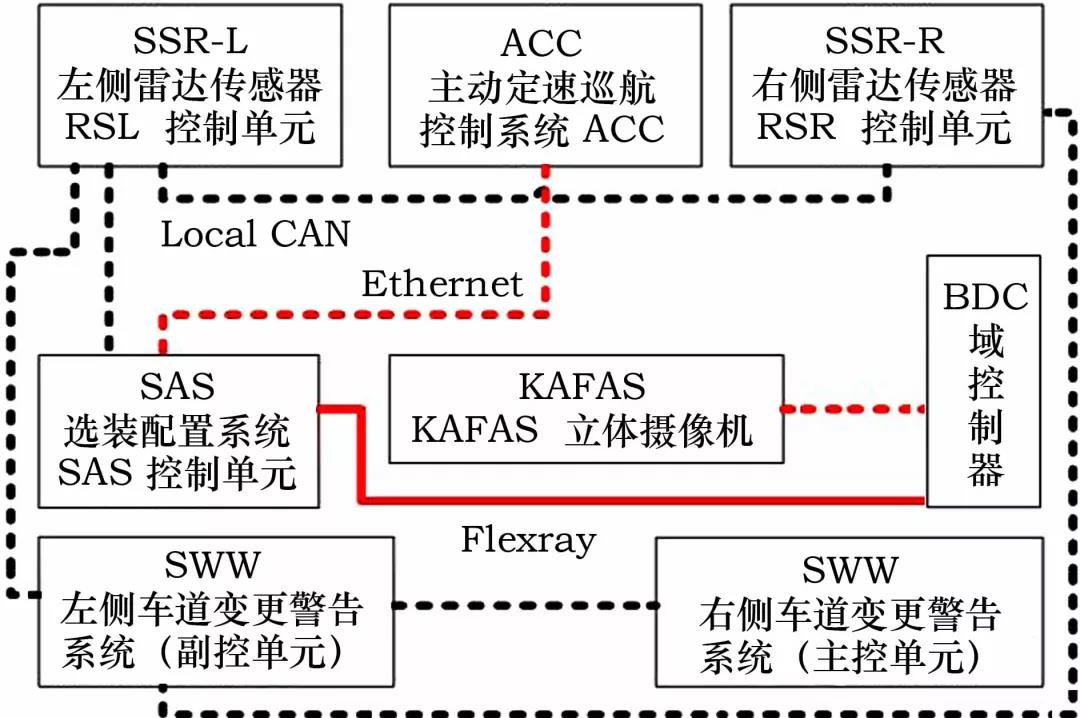
图9 车道偏离警告系统原理框图
2.2 车道变更警告系统
首次将其应用于F01/F02车辆,车道变更警告系统SWW控制单元(传感器)位于后保险杠下方。车道变更警告系统SWW控制单元(主控单元)位于右侧,车道变更警告系统SWW2控制单元(副控单元)位于左侧。一些传感器能够根据天气情况在最远70m距离内进行有效探测。识别出车辆且启用系统时,通过车外后视镜内的相应显示告知驾驶员情况。车道变更警告系统原理框图见图10。
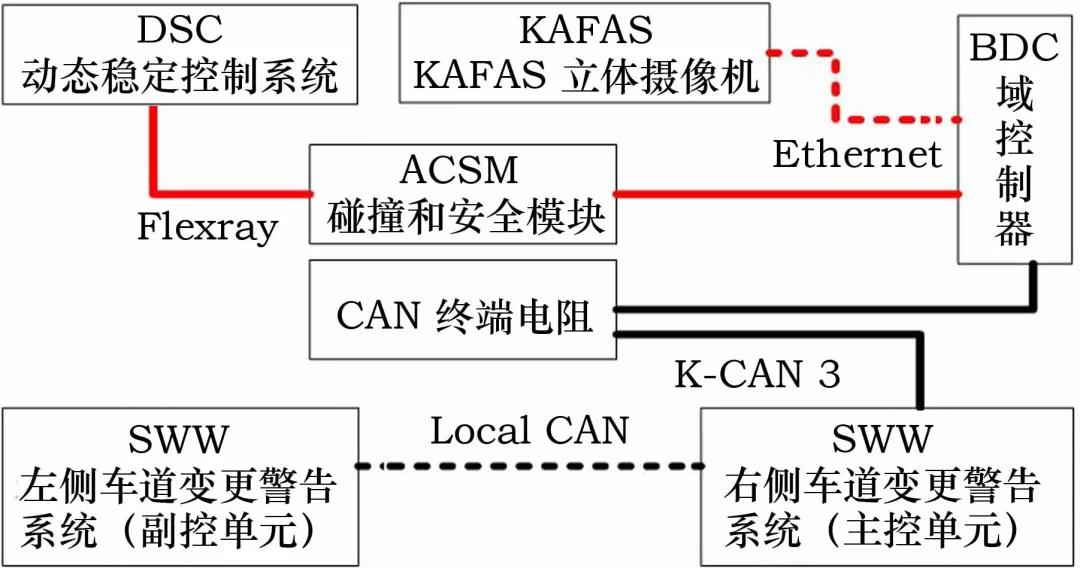
图10 车道变更警告系统原理框图
2.3 夜视系统
集成在BMW肾形格栅内,夜视系统可在夜间最佳条件下识别出最远约100m处的行人和动物,在5℃以下温度范围内会接通一个加热装置,从而避免摄像机结冰。行人识别最远约100 m,大型动物识别最远约150 m,中型动物识别最远约70 m。夜视系统原理框图见图11。
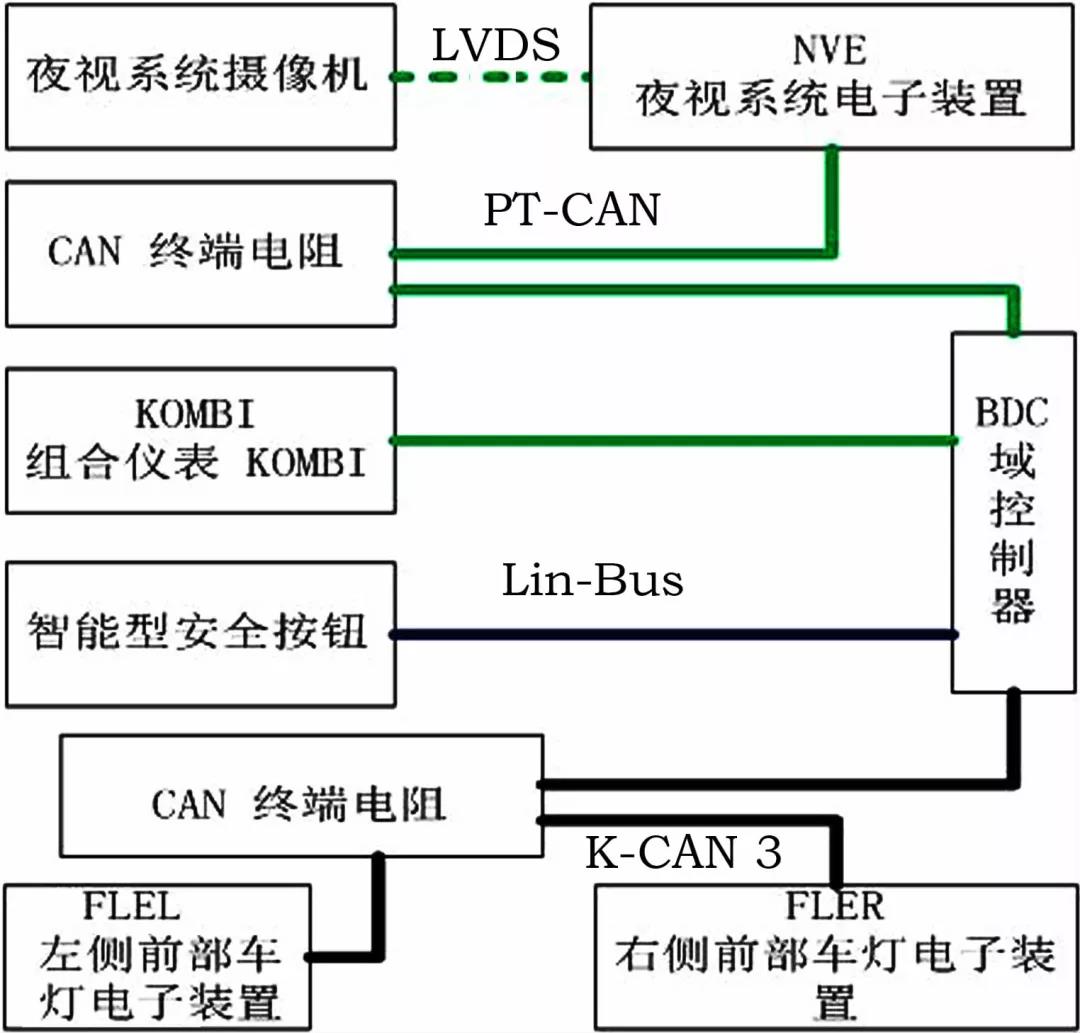
图11 夜视系统原理框图
2.4 驻车和倒车系统
驻车操作辅助系统PMA可以测量停车位大小并根据测量结果确定停车位是否够大,前部保险杠内的2个附加超声波传感器负责在行驶期间测量停车位,通过后部保险杠饰板内的4个超声波传感器和前部保险杠饰板内的另外4个超声波传感器测量与障碍物的距离,通过位于后部保险杠内的另外2个超声波传感器在停车入位过程中准确探测横向停车位。通过附加PDC传感器测量与所识别目标的距离。驻车和倒车系统原理框图见图12。
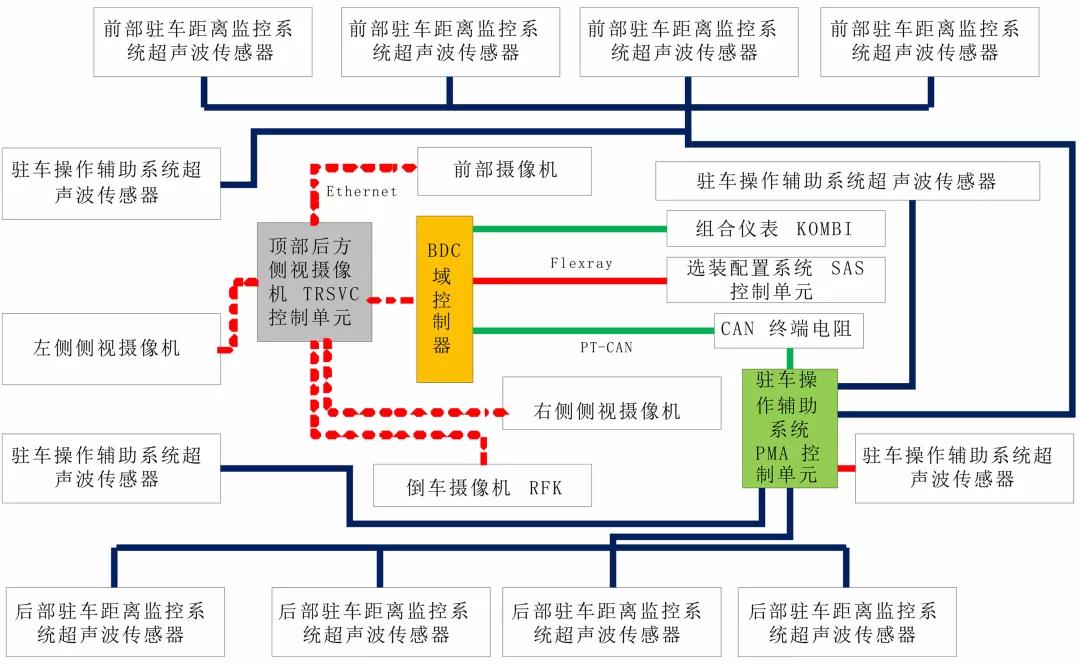
图12 驻车和倒车系统原理框图
2.5 第6代G11/12与第5代FOI/02对比
第6代7系宝马在第5代的基础上增添了如车道偏离警告系统、交通标志识别系统、环视系统、交叉行驶警告系统等智能辅助驾驶功能,同时更多地在娱乐、摄像机信号图像传输等模块使用高带宽的以太网代替原来的LVDS传输。
中央网关模块ZGM集成在BDC内,它可以说是控制单元中的控制单元,因为BDC内ZGM的工作方式就像是一个独立的控制单元。ZGM将所有主总线系统彼此连接起来,将不同协议和速度转换到其他总线系统上。通过ZGM可经过以太网将有关控制单元的编程数据传输到车辆上。
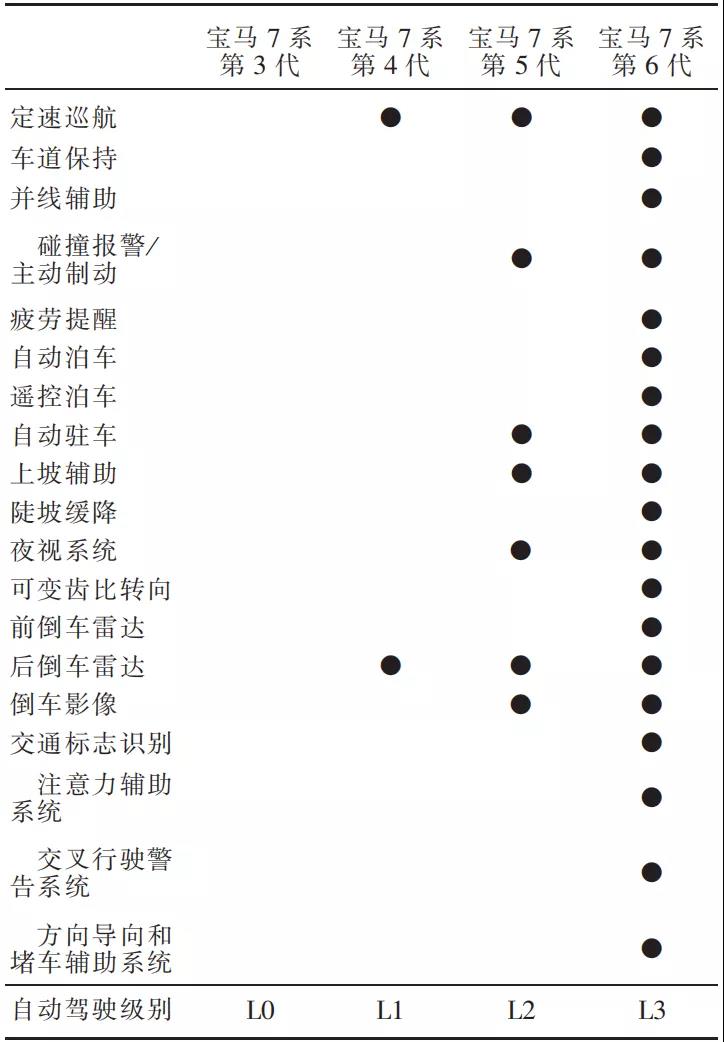
第3-6代辅助驾驶系统配置及智能驾驶分级见表1。
表1 第3~6代辅助驾驶系统配置及智能驾驶分级
2.1 车道偏离警告系统
通过车道偏离警告系统识别出偏离车道情况,借助振荡执行机构产生相应方向盘振动,并通过相应警告灯发出车外后视镜内的视觉警告时触发,车速范围在70~210km/h。车道偏离警告系统原理框图如图9所示。
图9 车道偏离警告系统原理框图
2.2 车道变更警告系统
首次将其应用于F01/F02车辆,车道变更警告系统SWW控制单元(传感器)位于后保险杠下方。车道变更警告系统SWW控制单元(主控单元)位于右侧,车道变更警告系统SWW2控制单元(副控单元)位于左侧。一些传感器能够根据天气情况在最远70m距离内进行有效探测。识别出车辆且启用系统时,通过车外后视镜内的相应显示告知驾驶员情况。车道变更警告系统原理框图见图10。
图10 车道变更警告系统原理框图
2.3 夜视系统
集成在BMW肾形格栅内,夜视系统可在夜间最佳条件下识别出最远约100m处的行人和动物,在5℃以下温度范围内会接通一个加热装置,从而避免摄像机结冰。行人识别最远约100 m,大型动物识别最远约150 m,中型动物识别最远约70 m。夜视系统原理框图见图11。
图11 夜视系统原理框图
2.4 驻车和倒车系统
驻车操作辅助系统PMA可以测量停车位大小并根据测量结果确定停车位是否够大,前部保险杠内的2个附加超声波传感器负责在行驶期间测量停车位,通过后部保险杠饰板内的4个超声波传感器和前部保险杠饰板内的另外4个超声波传感器测量与障碍物的距离,通过位于后部保险杠内的另外2个超声波传感器在停车入位过程中准确探测横向停车位。通过附加PDC传感器测量与所识别目标的距离。驻车和倒车系统原理框图见图12。
图12 驻车和倒车系统原理框图
2.5 第6代G11/12与第5代FOI/02对比
第6代7系宝马在第5代的基础上增添了如车道偏离警告系统、交通标志识别系统、环视系统、交叉行驶警告系统等智能辅助驾驶功能,同时更多地在娱乐、摄像机信号图像传输等模块使用高带宽的以太网代替原来的LVDS传输。
中央网关模块ZGM集成在BDC内,它可以说是控制单元中的控制单元,因为BDC内ZGM的工作方式就像是一个独立的控制单元。ZGM将所有主总线系统彼此连接起来,将不同协议和速度转换到其他总线系统上。通过ZGM可经过以太网将有关控制单元的编程数据传输到车辆上。
第3-6代辅助驾驶系统配置及智能驾驶分级见表1。
表1 第3~6代辅助驾驶系统配置及智能驾驶分级
- 下一篇:特斯拉ModeI S
- 上一篇:奥迪A8智能驾驶及整车电子电气架构



编辑推荐




最新资讯
-
R171.01对DCAS的要求⑤
2025-04-20 10:58
-
自动驾驶卡车创企Kodiak 将通过SPAC方式上
2025-04-19 20:36
-
编队行驶卡车仍在奔跑
2025-04-19 20:29
-
全国汽车标准化技术委员会汽车节能分技术委
2025-04-18 17:34
-
我国联合牵头由DC/DC变换器供电的低压电气
2025-04-18 17:33
