




 广告
广告





















































干货分享|浅析自动驾驶多目标跟踪
2021-07-14 23:06:28· 来源:国汽智联 作者:芦健

感知模块是自动驾驶系统的核心之一,其传感器融合技术集各类传感器的优势,弥补了光照因素对相机的影响,雨、雪、沙尘等恶劣天气对激光雷达的影响以及毫米波在视
感知模块是自动驾驶系统的核心之一,其传感器融合技术集各类传感器的优势,弥补了光照因素对相机的影响,雨、雪、沙尘等恶劣天气对激光雷达的影响以及毫米波在视场角上的弊端。传感器融合技术将不同类型传感器的目标识别结果进行多目标跟踪处理,获取更为精确的位置,速度等目标信息。对于自然驾驶场景还原来说,传感器融合和多目标跟踪也是复现不同场景的重要环节。
本文介绍了一种基于随机有限集(RFS)的高斯混合概率假设密度(GM-PHD)算法在融合跟踪方面的实际应用,同时分析了与传统数据关联类跟踪算法的优劣。
多目标跟踪的挑战

单目标跟踪以对象位置及描述其运动的属性来确定对象状态,通常被认为是滤波问题,是对传感器测量噪声的时序处理。而下述问题决定了多目标跟踪的复杂性:
真实环境中同一时刻需要跟踪的目标远不止一个;
常用的卡尔曼滤波无法单独处理多目标跟踪的问题;
噪声和一些未知目标给跟踪带来更多挑战。
传感器融合的对象既可能是多个同一类型的传感器也可能是如相机、激光雷达和毫米波雷达等多个不同类型传感器的组合。相机的图像和LiDAR的点云等传感器数据作为输入进入单传感器detector来获得测每一帧原始目标列表的测量值。目标列表级的多目标融合算法根据目标列表的输入,更新假设的先验估计,得到每帧目标状态估计的后验概率密度的具体表达式。融合算法考虑多目标观测序列和他们的状态估计进行跟踪,其不只是通过时间,同时也是基于物体的真实状态估计目标状态。
传统跟踪算法的不足
在实际操作中,多目标跟踪存在不少挑战,例如:FOV中不确定的目标数量、目标物的运动状态、目标物在不同方向上移动、新目标物的出现和旧目标物的消失、FOV中目标物被另一个遮挡以及不完美的传感器的测量值。
传统的跟踪算法,如概率数据关联 (Probabilistic Data Association, PDA) 以及多假设跟踪器(Multiple Hypothesis Tracking, MHT)等,都是通过对测量值的分配, 将多目标问题转化为并行的单目标跟踪处理问题, 但是这些算法处理过程的核心及关键都只是数据关联。当目标数较多且存在大量虚警时, 数据关联误差与状态估计误差相互耦合, 会造成数据关联与状态估计之间的相互影响。
GM-PHD算法
目前,我们在进行场景复现时使用的多传感器融合技术为GM-PHD(Gaussian Mixture Probability Hypothesis Density Filter)算法。
GM-PHD可归类为一种贝叶斯递归滤波器,它以目标的概率假设密度(PHD)来计算贝叶斯滤波中每一时刻传递的目标完全后验密度,有别于传统数据关联加单目标跟踪的方法。基于随机有限集RFS(Random Finite Set)的GM-PHD滤波在状态估计过程中避免了数据关联问题, 跟踪时在信息上保留了各个关联方式所产生的结果,实现考虑时间序列上的最佳“数据关联”。
同时,GM-PHD具有去除杂波的特性,可以基于随机有限集计算基的期望值作为目标个数,并依据目标个数依次选择强度函数中的极大值对应的单一目标状态,从而获得整体的多目标跟踪状态,实现对目标的联合检测与跟踪。基于PHD框架下的多目标跟踪方法有严谨的数学理论基础,它通过对后验密度的一阶统计矩的预测与更新, 最终获取目标状态及目标数估计,适用于一些关联过程相对复杂的非传统意义下的多目标跟踪问题。
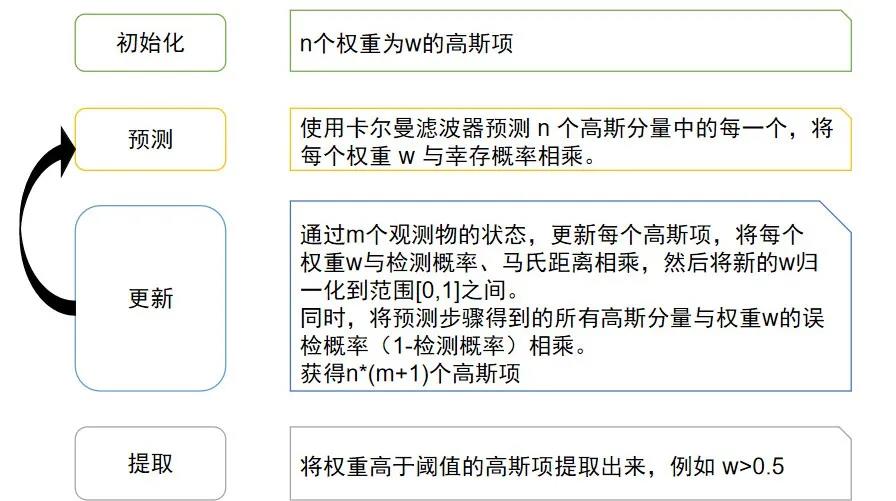
PHD中观测模型和运动模型都以随机有限集进行建模。其认为获得测量值集合的过程来源于两部分的并集,一是真实目标的观测结果集,二是虚目标集。算法认为前者是伯努利过程,服从有限集的伯努利分布;后者是泊松过程,服从有限集的泊松分布。运动模型也是两部分的并集,一是“生存”下来的目标集,二是“出生”的新目标集。因为这些分布是随机有限集的分布,所以其概率密度函数中既包含了集合中元素的状态可能性的信息,也包含了元素的存在可能性的信息。下图展示了一个大致的GM-PHD滤波的过程。
目前,国汽智联场景仿真部在场景还原中已实现基于摄像头、毫米波和激光雷达中任意一种或多种输入的多目标跟踪算法,对采集场景中的动态交通参与者进行融合与跟踪,提取出各帧下的真实目标同时排除假目标,保障真实目标信息的连续稳定输出,复现真实采集的交通流,取得了良好效果。
未来,国汽智联将依托CAICV联盟智能传感器工作组,联合更广泛的行业力量共同建设基础数据深度处理和数据应用支撑能力,为智能网联汽车产业共建中国标准场景库做出贡献。
本文介绍了一种基于随机有限集(RFS)的高斯混合概率假设密度(GM-PHD)算法在融合跟踪方面的实际应用,同时分析了与传统数据关联类跟踪算法的优劣。
多目标跟踪的挑战
单目标跟踪以对象位置及描述其运动的属性来确定对象状态,通常被认为是滤波问题,是对传感器测量噪声的时序处理。而下述问题决定了多目标跟踪的复杂性:
真实环境中同一时刻需要跟踪的目标远不止一个;
常用的卡尔曼滤波无法单独处理多目标跟踪的问题;
噪声和一些未知目标给跟踪带来更多挑战。
传感器融合的对象既可能是多个同一类型的传感器也可能是如相机、激光雷达和毫米波雷达等多个不同类型传感器的组合。相机的图像和LiDAR的点云等传感器数据作为输入进入单传感器detector来获得测每一帧原始目标列表的测量值。目标列表级的多目标融合算法根据目标列表的输入,更新假设的先验估计,得到每帧目标状态估计的后验概率密度的具体表达式。融合算法考虑多目标观测序列和他们的状态估计进行跟踪,其不只是通过时间,同时也是基于物体的真实状态估计目标状态。
传统跟踪算法的不足
在实际操作中,多目标跟踪存在不少挑战,例如:FOV中不确定的目标数量、目标物的运动状态、目标物在不同方向上移动、新目标物的出现和旧目标物的消失、FOV中目标物被另一个遮挡以及不完美的传感器的测量值。
传统的跟踪算法,如概率数据关联 (Probabilistic Data Association, PDA) 以及多假设跟踪器(Multiple Hypothesis Tracking, MHT)等,都是通过对测量值的分配, 将多目标问题转化为并行的单目标跟踪处理问题, 但是这些算法处理过程的核心及关键都只是数据关联。当目标数较多且存在大量虚警时, 数据关联误差与状态估计误差相互耦合, 会造成数据关联与状态估计之间的相互影响。
GM-PHD算法
目前,我们在进行场景复现时使用的多传感器融合技术为GM-PHD(Gaussian Mixture Probability Hypothesis Density Filter)算法。
GM-PHD可归类为一种贝叶斯递归滤波器,它以目标的概率假设密度(PHD)来计算贝叶斯滤波中每一时刻传递的目标完全后验密度,有别于传统数据关联加单目标跟踪的方法。基于随机有限集RFS(Random Finite Set)的GM-PHD滤波在状态估计过程中避免了数据关联问题, 跟踪时在信息上保留了各个关联方式所产生的结果,实现考虑时间序列上的最佳“数据关联”。
同时,GM-PHD具有去除杂波的特性,可以基于随机有限集计算基的期望值作为目标个数,并依据目标个数依次选择强度函数中的极大值对应的单一目标状态,从而获得整体的多目标跟踪状态,实现对目标的联合检测与跟踪。基于PHD框架下的多目标跟踪方法有严谨的数学理论基础,它通过对后验密度的一阶统计矩的预测与更新, 最终获取目标状态及目标数估计,适用于一些关联过程相对复杂的非传统意义下的多目标跟踪问题。
PHD中观测模型和运动模型都以随机有限集进行建模。其认为获得测量值集合的过程来源于两部分的并集,一是真实目标的观测结果集,二是虚目标集。算法认为前者是伯努利过程,服从有限集的伯努利分布;后者是泊松过程,服从有限集的泊松分布。运动模型也是两部分的并集,一是“生存”下来的目标集,二是“出生”的新目标集。因为这些分布是随机有限集的分布,所以其概率密度函数中既包含了集合中元素的状态可能性的信息,也包含了元素的存在可能性的信息。下图展示了一个大致的GM-PHD滤波的过程。
目前,国汽智联场景仿真部在场景还原中已实现基于摄像头、毫米波和激光雷达中任意一种或多种输入的多目标跟踪算法,对采集场景中的动态交通参与者进行融合与跟踪,提取出各帧下的真实目标同时排除假目标,保障真实目标信息的连续稳定输出,复现真实采集的交通流,取得了良好效果。
未来,国汽智联将依托CAICV联盟智能传感器工作组,联合更广泛的行业力量共同建设基础数据深度处理和数据应用支撑能力,为智能网联汽车产业共建中国标准场景库做出贡献。



编辑推荐




最新资讯
-
推荐性国家标准《乘/商用车电子机械制动卡
2025-04-30 11:13
-
载荷分解
2025-04-30 10:46
-
布雷博在上海开设亚洲首个灵感实验室
2025-04-30 10:25
-
组分性能对锂离子电池卷芯挤压力学响应的影
2025-04-30 09:00
-
美国发布自动驾驶新框架,放宽报告要求+扩
2025-04-30 08:59
