




 广告
广告





















































智能网联汽车虚拟仿真平台
2021-07-17 14:33:07· 来源:联合电子

随着网联化、智能化领域的加速发展,越来越多的数字化、网联化的功能正得以开发。如果在真实环境中对这些功能进行实车测试,需要构建多样的驾驶环境,其所需要的
随着网联化、智能化领域的加速发展,越来越多的数字化、网联化的功能正得以开发。如果在真实环境中对这些功能进行实车测试,需要构建多样的驾驶环境,其所需要的资源、人力、费用等都是难以估量的,此外特定的测试场景以及测试工况也会带来一定的安全隐患。
在这种背景下,联合电子建立智能网联汽车仿真创新工作室,为控制器产品及软件业务的开展提供了测试验证平台——智能网联汽车虚拟仿真平台。
智能网联汽车虚拟仿真平台通过模拟驾驶座舱、虚拟现实、交通环境实时仿真以及控制器闭环测试技术将驾驶环境、车辆以及驾驶员“搬入”实验室,从而摆脱真实环境的束缚,实现在多种工况下对控制器及软件功能提供测试验证。凭借联合电子雄厚的技术实力,开发了实时硬件在环设备和驾驶模拟器,利用虚拟场景和车辆仿真软件(Simulink & CarSim),自主搭建了以“实时交通仿真—模拟驾驶环境—人机交互界面—驾驶员—控制器—整车模型”为链路的虚拟车辆闭环测试环境。
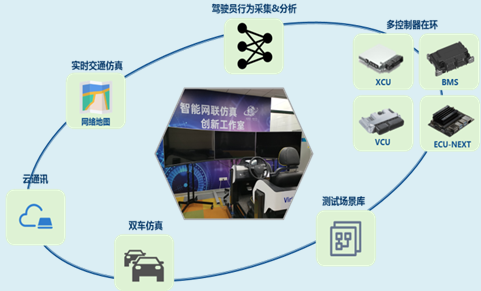
图 1 虚拟车辆仿真技术方案
智能网联汽车虚拟仿真平台在整个环境中能够实现:
模拟真实的交通环境和驾驶场景;
虚拟自车模型实时计算整车动力学数据;
整合自车信息与驾驶环境信息,通过以太网发送给控制器;
驾驶员通过驾驶模拟器对虚拟车辆进行驾驶,实现真实体验,准确感知,精准操控;
实现人-车-路在环。

图 2智能网联仿真创新工作室实景
为了更好地服务于智能网联功能的验证,智能网联汽车虚拟仿真平台建立了如下几项重要功能点:
交通测试场景库:
针对不同智能网联功能的测试需求进行了分析,搭建了针对性的测试交通场景库;
多控制器在环:
实现多控制器软件和硬件在环功能,完整地模拟了真实的整车环境;
云端虚拟控制器通讯:
通过云通讯的方式,实现与云中的Linux虚拟机的SOA架构的控制器软件进行联合仿真测试;
符合ADASIS规范的导航信息:
实现了满足ADASIS规范的通讯协议,最大限度地为被测功能提供了与整车一致的交通和信息;
双车仿真:
针对需要考虑周车行为的智能网联功能,基于UDP网络通讯协议,实现两台虚拟车辆在同一测试场景中进行双车仿真。在主车进行测试时,第二台车辆可以作为周车对主车进行互动,并将本车信息通过以太网提供给主车控制器,验证智能网联功能的完善性;
驾驶行为采集:
通过驾驶模拟器,在特定驾驶场景下对驾驶员的行为进行数据采集,提供给功能开发人员;
联合电子智能网联汽车虚拟仿真平台目前已经应用到多个项目,包括:预测性滑行能量回收;预测性续航里程估算;智能巡航;预测性速度规划;预测性电池热管理等。
此外,考虑到客户端可能存在仿真工具或者实车验证等条件不成熟的情况,联合电子虚拟仿真平台也可以支持外部客户对其开发的智能网联功能进行验证,不仅可以节省客户开发验证成本,同时帮助客户提升开发效率,加速其智能网联功能的孵化。
在这种背景下,联合电子建立智能网联汽车仿真创新工作室,为控制器产品及软件业务的开展提供了测试验证平台——智能网联汽车虚拟仿真平台。
智能网联汽车虚拟仿真平台通过模拟驾驶座舱、虚拟现实、交通环境实时仿真以及控制器闭环测试技术将驾驶环境、车辆以及驾驶员“搬入”实验室,从而摆脱真实环境的束缚,实现在多种工况下对控制器及软件功能提供测试验证。凭借联合电子雄厚的技术实力,开发了实时硬件在环设备和驾驶模拟器,利用虚拟场景和车辆仿真软件(Simulink & CarSim),自主搭建了以“实时交通仿真—模拟驾驶环境—人机交互界面—驾驶员—控制器—整车模型”为链路的虚拟车辆闭环测试环境。
图 1 虚拟车辆仿真技术方案
智能网联汽车虚拟仿真平台在整个环境中能够实现:
模拟真实的交通环境和驾驶场景;
虚拟自车模型实时计算整车动力学数据;
整合自车信息与驾驶环境信息,通过以太网发送给控制器;
驾驶员通过驾驶模拟器对虚拟车辆进行驾驶,实现真实体验,准确感知,精准操控;
实现人-车-路在环。
图 2智能网联仿真创新工作室实景
为了更好地服务于智能网联功能的验证,智能网联汽车虚拟仿真平台建立了如下几项重要功能点:
交通测试场景库:
针对不同智能网联功能的测试需求进行了分析,搭建了针对性的测试交通场景库;
多控制器在环:
实现多控制器软件和硬件在环功能,完整地模拟了真实的整车环境;
云端虚拟控制器通讯:
通过云通讯的方式,实现与云中的Linux虚拟机的SOA架构的控制器软件进行联合仿真测试;
符合ADASIS规范的导航信息:
实现了满足ADASIS规范的通讯协议,最大限度地为被测功能提供了与整车一致的交通和信息;
双车仿真:
针对需要考虑周车行为的智能网联功能,基于UDP网络通讯协议,实现两台虚拟车辆在同一测试场景中进行双车仿真。在主车进行测试时,第二台车辆可以作为周车对主车进行互动,并将本车信息通过以太网提供给主车控制器,验证智能网联功能的完善性;
驾驶行为采集:
通过驾驶模拟器,在特定驾驶场景下对驾驶员的行为进行数据采集,提供给功能开发人员;
联合电子智能网联汽车虚拟仿真平台目前已经应用到多个项目,包括:预测性滑行能量回收;预测性续航里程估算;智能巡航;预测性速度规划;预测性电池热管理等。
此外,考虑到客户端可能存在仿真工具或者实车验证等条件不成熟的情况,联合电子虚拟仿真平台也可以支持外部客户对其开发的智能网联功能进行验证,不仅可以节省客户开发验证成本,同时帮助客户提升开发效率,加速其智能网联功能的孵化。
- 下一篇:雷丁新能源试验中心获CNAS认可!
- 上一篇:纯电动汽车前舱下车体布置及系统选型研究



编辑推荐




最新资讯
-
中汽中心工程院能量流测试设备上线全新专家
2025-04-03 08:46
-
上新|AutoHawk Extreme 横空出世-新一代实
2025-04-03 08:42
-
「智能座椅」东风日产N7为何敢称“百万级大
2025-04-03 08:31
-
基于加速度计补偿的俯仰角和路面坡度角估计
2025-04-03 08:30
-
《北京市自动驾驶汽车条例》正式实施 L3级
2025-04-02 20:23
