




 广告
广告





















































商用智能汽车-自动紧急制动技术测试
2021-07-22 23:46:17· 来源:ATC汽车底盘

伴随着数量庞大和功能日益丰富的控制器、传感器和执行器在机电系统上的嵌入集成,机电工程系统的功能日益丰富、精密性和整体性显著提升。机电工程一体化的发展是
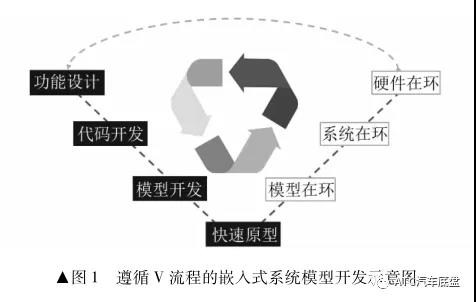
伴随着数量庞大和功能日益丰富的控制器、传感器和执行器在机电系统上的嵌入集成,机电工程系统的功能日益丰富、精密性和整体性显著提升。机电工程一体化的发展是多学科任务的融合,它的需求依赖于不同技术的协同发展。其中,遵循“V 模型”的基于模型的开发( MBD)方法是一种公认的系统开发方案。尽管MBD起源于软件的系统开发,但是在机电产品系统,尤其是汽车嵌入式软件开发中得到推广。V模型的流程开发图如图1所示。由图1可知,V模型的流程开发的主要环节包括: 功能设计、代码开发、模型开发、快速原型、模型在环测试、系统在环测试和硬件在环测试七大组成部分。
硬件在环(HiL)仿真是通过实时处理机器运行动态模型,为真实控制器提供所需关键要素信号的测试方法,其目的是在机电产品量产前尽可能地发现问题并提供修改依据,为项目短开发时间,减少耗费成本。AEB自动紧急制动技术(Autonomous Emergency Bra-king,AEB) 是一项主动安全技术。它具体指的是搭载AE功能的车辆在非自适应巡航的情况下行驶时,针对前方出现突发情况( 包含不限于前车、故障车、行人、路障等) 时,主动进行制动以保证安全距离和减少碰撞事故的发生。制动技术对传统车辆及智能车辆行驶安全性影响极大,因此国内外众多学者对汽车制动技术相关内容进行了研究和分析。
其中,以电动汽车为研究对象,对电动汽车磁流变液制动器的径向流动特性进行研究和分析; 对汽车自动紧急制动系统进行建模,并对自动紧急制动控制策略进行研究; 对汽车自动紧急制动系统的控制策略进行研究和分析; 对汽车前方危险状态进行评估,并对自动紧急制动控制策略进行研究和分析;在考虑轮、地接触等因数设计了汽车盘式制动器模拟制动试验台,并对设计的试验台进行试验验证; 采用摄像头传感器对高级驾驶辅助系统硬件在环测试进行研究。
基于上述研究者对汽车制动技术、制动系统、制动器及控制系统等方面的研究基础,本文以基于模型开发的自动紧急制动功能软件为研究对象,通过控制器硬件在环台架编写测试用例对其功能进行测试,进而对国家法规限定的测试指标进行梳理,验证了该类型项目开发的必要性,为后续的工程推广应用提供重要数据支撑。
HiL 系统物理结构分析
硬件在环系统提供了一种在实时处理环境和虚拟动力学模型共同组成的系统中,快速、灵活且高效的方式验证基于模型开发算法的控制器的功能和性能的方法。HiL系统集成使用快速控制原型( rapid-control-prototype,RCP)工具,与其它多个控制器共同组成系统的主要节点。各个节点与相应的执行器和传感器采用机械或电气连接,可以对测试对象的物理工作环境的中信号进行实时模拟。尤其是在 AEB 测试方面,HiL 系统的平台实时环境中控制系统的开发和验证( 特别是极端场景和危险工况) ,可以大幅减少与实验验证相关的风险和成本。硬件在环系统物理结构如图 2 所示。
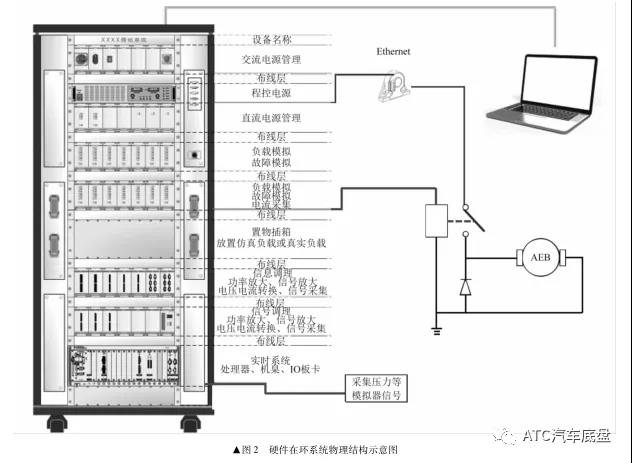
本文研究的 Hil 主要部件有机柜、上位机、被测对象( AEB 控制器) 、各类传感器以及保证他们互相连接的线束和机械部件。
AEB-HiL 系统基础特性
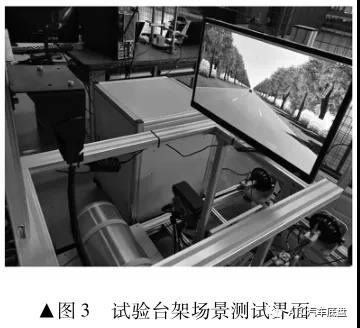
本项目搭建的AEB-HiL 测试台架自身集成了转向和加减速子系统,融合车辆动力学模型,与AEB系统进行无缝连接。Hil 系统中,真正的转向和制动智能执行器系统已链接虚拟车辆模型。台架通过CAN总线采集执行器的当前状态和发送相应指令。试验台架场景测试界面如图3 所示。
由图3可知,驾驶员对系统的输入包括方向盘的扭矩和转向角度,而制动踏板和加速踏板位置来自计算机生成的道路场景并通过搭载的摄像头识别。转向扭矩反馈到驱动力是由施加到转向架通过两个线性电动执行器连接到机架的两端,力的方向由车辆模型进行控制。制动系统的主要部件包括: 制动踏板,主控气缸,主动制动系统和完整的液压管路。为了减少 HiL 的成本和台架物理部件的复杂性,没有选装真实的车轮,仅用轮速传感器代替。因此,刹车的虚拟部分系统是车轮动力学和制动扭矩计算,与高精度车辆动力学模型进行集成。
车辆模拟器由高精度车辆模型( 如 CarSim) 和可实时执行处理器( 此处为dSPACE Simulator) 共同保证。车辆模拟器和 ECU、传感器之间的通讯通过数字信号和 CAN 总线接口得以保证。搭建的 HiL 台架可以有效地应对软件逻辑的自动化测试,极大地丰富测试完整性。综合考虑 AEB 系统的特性,本文选取具有代表型的系统功能特性进行分析。由于 HiL 可变的机械部件结构,各种被测控制器可以自由选择连接、安装与否,为 HiL 系统充当 AEB 等系统的功能和性能的验证工具提供了额便利的物理条件。
HiL 台架是基于模型开发系统验证的重要工具,它具有可重复测试的优点,可以借助参数类似的场景模拟处理安全关键型应用程序的测试。换而言之,HiL 可以将设置设置为重复数百个类似的测试用例自主地进行,这对于鲁棒性或故障安全验证和测试。同时,HiL 可以自主运行或在循环中输入驱动程序,可以得到真正驾驶员的回应导致更真实的动态表示车辆驾驶员控制系统。这一特性对 AEB 等主动安全设计和验证极为重要。
测试结果分析
为了测试AEB系统功能,本节以仿真计算为手段,将系统功能拆分为逻辑测试和标准法规测试进行测试。
3.1 功能逻辑测试
功能逻辑测试按照功能逻辑定义文档进行,包括车辆静
止时摄像头的上下电场景以及车辆运动时摄像头的功能激活与抑制等场景。以开关上电为例,电源由OFF-> ON,空挡、未踩制动板、未开启转向灯、ABS正常无故障且未被激活,且满足其它进入 Standby 的所有条件,进入Standby。测试记录参数图如图4所示。图4中,AEB-state信号表征AEB系统状态; AEB switch表征 AEB开关信号; gear position表征档位信号; Throttle信号表征加速踏板开度; Brake信号表征制动踏板; ABS-active信号表征ABS系统开关; handbrake信号表征手刹状态; Turn-signal 信号表征转向灯状态。
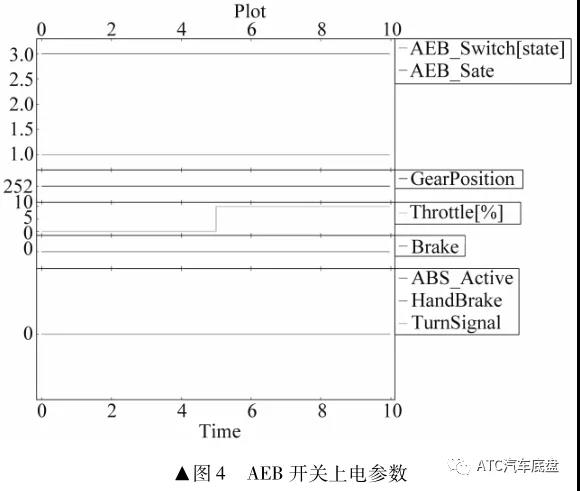
由图4可知,车辆处于D挡、未踩制动板、未开启转向灯、ABS/EBS正常无故障且未被激活,系统在驾驶员踩油门的操作下进入Standby状态,符合测试预期,测试用例通过。
3.2 标准法规测试
标准法规测试用例参考标准为: Euro NCAP、ECE、C-NCAP等。以测试主车以不同速度对静止目标物的AEB 性能为例,测试车辆相对于静止物体以20km/h行驶,所得测试参数如图 5 所示。

图5中,Ego-speed 信号表征测试自车速度; Target-speed信号表征目标对象的车速;Dx表示自车与目标物的纵向距离; Dy表示自车与车道线的横向距离。由图5可知,目标物从33km/h突然减速为零,自车以20km/h 跟随反应进行刹车,刹停时两车相对距离为3.24m。
结果分析
根据试验条件及处于的环境,得到商用车HiL项目中的AEB功能测试中,道路参数、时间参数和天气参数的结果如下表1、表2、表3所示。由表1、2、3可知,道路类型测试中,选取了直道测试用例302例,通过数为155; 弯道测试用例为2例,通过数为2;得到道路参数结果如图 6所示。
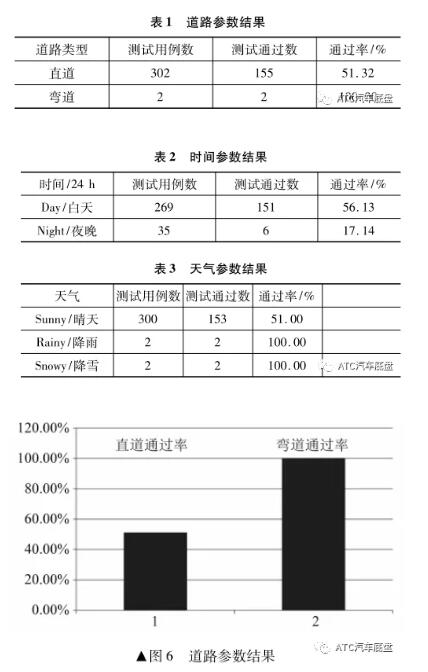
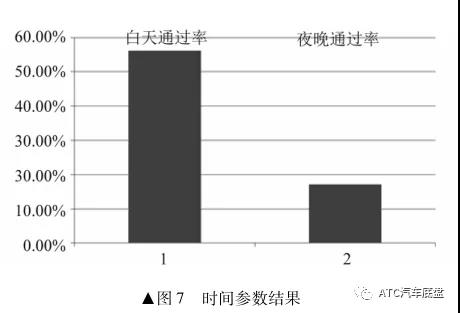
时间参数测试中,选取了白天测试用例269例,通过数为151; 夜晚测试用例为35例,通过数为6。得到时间参数结果如图7所示。
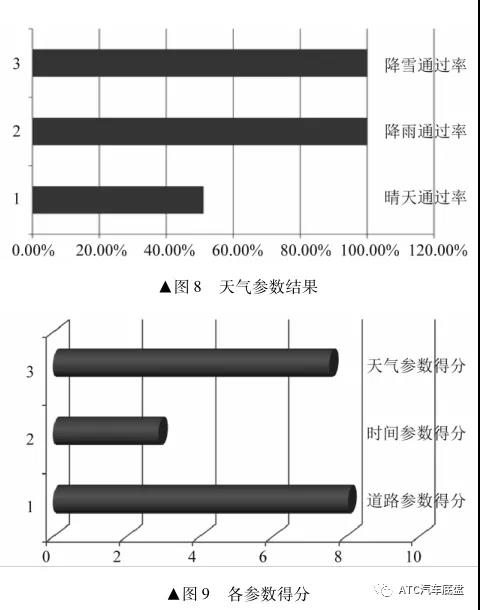
气参数测试中,选取了晴天测试用例300例,通过数为153; 雨天测试用例为2例,通过数为2; 降雪天气测试用例为2例,通过数为2。得到天气参数结果如图8所示。
根据上文道路、时间、天气参数及测试试验数据,参照权威发布标准,得出道路参数、时间参数和天气参数的得分如图9所示。由图9可知,道路参数、时间参数和天气参数的得分分别为8.052、2.884、7.55分。对上述三者取平均加权得 AEB 的总体得分为6.162分。
由上表1、2、3及图6、7、8、9可知,AEB的直道通过率为51.32%,弯道无仅有两个测试用例,测试为100%通过; 夜晚功能总体弱于白天; 其中,在天气参数中,晴天时 AEB 的通过率仅有51.00%,尽管大幅低于降雨的 100%和降雪的100%,但是,需要特别注意为降雨和降雪的测试用例相对较小,目前百分之百的通过率不能总体代表出 AEB 在雨雪天气下功能的总体优越性。
结论与展望
( 1) 当今汽车部件和子系统与其控制系统的相互作用日益增强,控制函数的日益复杂使得各种各样的测试开发任务呈级数增 长,依照项目搭建的 HiL 台架可以有效地应对软件逻辑的自动化逻辑测试,极大地丰富测试完整性,并且可以有效地整合入数据挖掘等手段,加速汽车开发阶段的优化和迭代速度,是进一步工作开展的方向。
( 2) 为了研究方便,本研究中假定驾驶员模型为仿真软件自带模型,保证了测试场景反应的一致性通过对测试结果的分析,时间参数中的夜晚得分大大影响了时间参数的总体得分; 摄像头需要针对时间参数中的夜晚识别性做出大幅优化,针对晴天和直道上的报警能力,也需做出适应性修改。
硬件在环(HiL)仿真是通过实时处理机器运行动态模型,为真实控制器提供所需关键要素信号的测试方法,其目的是在机电产品量产前尽可能地发现问题并提供修改依据,为项目短开发时间,减少耗费成本。AEB自动紧急制动技术(Autonomous Emergency Bra-king,AEB) 是一项主动安全技术。它具体指的是搭载AE功能的车辆在非自适应巡航的情况下行驶时,针对前方出现突发情况( 包含不限于前车、故障车、行人、路障等) 时,主动进行制动以保证安全距离和减少碰撞事故的发生。制动技术对传统车辆及智能车辆行驶安全性影响极大,因此国内外众多学者对汽车制动技术相关内容进行了研究和分析。
其中,以电动汽车为研究对象,对电动汽车磁流变液制动器的径向流动特性进行研究和分析; 对汽车自动紧急制动系统进行建模,并对自动紧急制动控制策略进行研究; 对汽车自动紧急制动系统的控制策略进行研究和分析; 对汽车前方危险状态进行评估,并对自动紧急制动控制策略进行研究和分析;在考虑轮、地接触等因数设计了汽车盘式制动器模拟制动试验台,并对设计的试验台进行试验验证; 采用摄像头传感器对高级驾驶辅助系统硬件在环测试进行研究。
基于上述研究者对汽车制动技术、制动系统、制动器及控制系统等方面的研究基础,本文以基于模型开发的自动紧急制动功能软件为研究对象,通过控制器硬件在环台架编写测试用例对其功能进行测试,进而对国家法规限定的测试指标进行梳理,验证了该类型项目开发的必要性,为后续的工程推广应用提供重要数据支撑。
HiL 系统物理结构分析
硬件在环系统提供了一种在实时处理环境和虚拟动力学模型共同组成的系统中,快速、灵活且高效的方式验证基于模型开发算法的控制器的功能和性能的方法。HiL系统集成使用快速控制原型( rapid-control-prototype,RCP)工具,与其它多个控制器共同组成系统的主要节点。各个节点与相应的执行器和传感器采用机械或电气连接,可以对测试对象的物理工作环境的中信号进行实时模拟。尤其是在 AEB 测试方面,HiL 系统的平台实时环境中控制系统的开发和验证( 特别是极端场景和危险工况) ,可以大幅减少与实验验证相关的风险和成本。硬件在环系统物理结构如图 2 所示。
本文研究的 Hil 主要部件有机柜、上位机、被测对象( AEB 控制器) 、各类传感器以及保证他们互相连接的线束和机械部件。
AEB-HiL 系统基础特性
本项目搭建的AEB-HiL 测试台架自身集成了转向和加减速子系统,融合车辆动力学模型,与AEB系统进行无缝连接。Hil 系统中,真正的转向和制动智能执行器系统已链接虚拟车辆模型。台架通过CAN总线采集执行器的当前状态和发送相应指令。试验台架场景测试界面如图3 所示。
由图3可知,驾驶员对系统的输入包括方向盘的扭矩和转向角度,而制动踏板和加速踏板位置来自计算机生成的道路场景并通过搭载的摄像头识别。转向扭矩反馈到驱动力是由施加到转向架通过两个线性电动执行器连接到机架的两端,力的方向由车辆模型进行控制。制动系统的主要部件包括: 制动踏板,主控气缸,主动制动系统和完整的液压管路。为了减少 HiL 的成本和台架物理部件的复杂性,没有选装真实的车轮,仅用轮速传感器代替。因此,刹车的虚拟部分系统是车轮动力学和制动扭矩计算,与高精度车辆动力学模型进行集成。
车辆模拟器由高精度车辆模型( 如 CarSim) 和可实时执行处理器( 此处为dSPACE Simulator) 共同保证。车辆模拟器和 ECU、传感器之间的通讯通过数字信号和 CAN 总线接口得以保证。搭建的 HiL 台架可以有效地应对软件逻辑的自动化测试,极大地丰富测试完整性。综合考虑 AEB 系统的特性,本文选取具有代表型的系统功能特性进行分析。由于 HiL 可变的机械部件结构,各种被测控制器可以自由选择连接、安装与否,为 HiL 系统充当 AEB 等系统的功能和性能的验证工具提供了额便利的物理条件。
HiL 台架是基于模型开发系统验证的重要工具,它具有可重复测试的优点,可以借助参数类似的场景模拟处理安全关键型应用程序的测试。换而言之,HiL 可以将设置设置为重复数百个类似的测试用例自主地进行,这对于鲁棒性或故障安全验证和测试。同时,HiL 可以自主运行或在循环中输入驱动程序,可以得到真正驾驶员的回应导致更真实的动态表示车辆驾驶员控制系统。这一特性对 AEB 等主动安全设计和验证极为重要。
测试结果分析
为了测试AEB系统功能,本节以仿真计算为手段,将系统功能拆分为逻辑测试和标准法规测试进行测试。
3.1 功能逻辑测试
功能逻辑测试按照功能逻辑定义文档进行,包括车辆静
止时摄像头的上下电场景以及车辆运动时摄像头的功能激活与抑制等场景。以开关上电为例,电源由OFF-> ON,空挡、未踩制动板、未开启转向灯、ABS正常无故障且未被激活,且满足其它进入 Standby 的所有条件,进入Standby。测试记录参数图如图4所示。图4中,AEB-state信号表征AEB系统状态; AEB switch表征 AEB开关信号; gear position表征档位信号; Throttle信号表征加速踏板开度; Brake信号表征制动踏板; ABS-active信号表征ABS系统开关; handbrake信号表征手刹状态; Turn-signal 信号表征转向灯状态。
由图4可知,车辆处于D挡、未踩制动板、未开启转向灯、ABS/EBS正常无故障且未被激活,系统在驾驶员踩油门的操作下进入Standby状态,符合测试预期,测试用例通过。
3.2 标准法规测试
标准法规测试用例参考标准为: Euro NCAP、ECE、C-NCAP等。以测试主车以不同速度对静止目标物的AEB 性能为例,测试车辆相对于静止物体以20km/h行驶,所得测试参数如图 5 所示。
图5中,Ego-speed 信号表征测试自车速度; Target-speed信号表征目标对象的车速;Dx表示自车与目标物的纵向距离; Dy表示自车与车道线的横向距离。由图5可知,目标物从33km/h突然减速为零,自车以20km/h 跟随反应进行刹车,刹停时两车相对距离为3.24m。
结果分析
根据试验条件及处于的环境,得到商用车HiL项目中的AEB功能测试中,道路参数、时间参数和天气参数的结果如下表1、表2、表3所示。由表1、2、3可知,道路类型测试中,选取了直道测试用例302例,通过数为155; 弯道测试用例为2例,通过数为2;得到道路参数结果如图 6所示。
时间参数测试中,选取了白天测试用例269例,通过数为151; 夜晚测试用例为35例,通过数为6。得到时间参数结果如图7所示。
气参数测试中,选取了晴天测试用例300例,通过数为153; 雨天测试用例为2例,通过数为2; 降雪天气测试用例为2例,通过数为2。得到天气参数结果如图8所示。
根据上文道路、时间、天气参数及测试试验数据,参照权威发布标准,得出道路参数、时间参数和天气参数的得分如图9所示。由图9可知,道路参数、时间参数和天气参数的得分分别为8.052、2.884、7.55分。对上述三者取平均加权得 AEB 的总体得分为6.162分。
由上表1、2、3及图6、7、8、9可知,AEB的直道通过率为51.32%,弯道无仅有两个测试用例,测试为100%通过; 夜晚功能总体弱于白天; 其中,在天气参数中,晴天时 AEB 的通过率仅有51.00%,尽管大幅低于降雨的 100%和降雪的100%,但是,需要特别注意为降雨和降雪的测试用例相对较小,目前百分之百的通过率不能总体代表出 AEB 在雨雪天气下功能的总体优越性。
结论与展望
( 1) 当今汽车部件和子系统与其控制系统的相互作用日益增强,控制函数的日益复杂使得各种各样的测试开发任务呈级数增 长,依照项目搭建的 HiL 台架可以有效地应对软件逻辑的自动化逻辑测试,极大地丰富测试完整性,并且可以有效地整合入数据挖掘等手段,加速汽车开发阶段的优化和迭代速度,是进一步工作开展的方向。
( 2) 为了研究方便,本研究中假定驾驶员模型为仿真软件自带模型,保证了测试场景反应的一致性通过对测试结果的分析,时间参数中的夜晚得分大大影响了时间参数的总体得分; 摄像头需要针对时间参数中的夜晚识别性做出大幅优化,针对晴天和直道上的报警能力,也需做出适应性修改。







最新资讯
-
大卓智能端到端直播实测,16公里复杂路段挑
2025-04-25 17:16
-
《汽车轮胎耐撞击性能试验方法-车辆法》等
2025-04-25 11:45
-
“真实”而精确的能量流测试:电动汽车能效
2025-04-25 11:44
-
GRAS助力中国高校科研升级
2025-04-25 10:25
-
梅赛德斯-AMG使用VI-CarRealTime开发其控制
2025-04-25 10:21
