




 广告
广告





















































全栈式自动驾驶测试与验证
2021-07-23 23:30:00· 来源:UKi 汽车测试及质量监控博览会

为确保智能网联汽车在人车融合应用下更快、更安全地商业化,需要新的测试技术、测试程序和测试标准。IAE X-IN-LOOP自动驾驶全栈式测试与验证解决方案是一套完整
为确保智能网联汽车在人车融合应用下更快、更安全地商业化,需要新的测试技术、测试程序和测试标准。IAE X-IN-LOOP自动驾驶全栈式测试与验证解决方案是一套完整的技术解决方案和工程服务,涵盖MIL-SIL-HIL-DIL-VIL(数字孪生试验场VIL->高级VIL->车辆-交通-环境在环),以加速自动驾驶研发以及时间和空间维度上的测试。
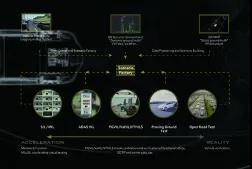
在MIL中,具有车辆动力学、传感器、交通和环境模型的测试系统完美集成于仿真环境。SIL利用实际软件实现来替换控制模型,以进行软件代码测试和验证。
HIL结合硬件和软件测试,可支持包括控制器硬件、传感器(如毫米波雷达、摄像头等)和执行器(x-by-wire系统)的测试。
DIL 使用人机交互来唤起、测量、建模并理解人类、智能网联车辆以及道路基础设施之间的复杂关系。
先进的整车在环测试实验室有助于在整车层面实现安全、可重复和高效率的功能测试。
VIL结合仿真和真实试验场测试,利用仿真工具创建基于场景的测试用例,并将虚拟交通场景注入真实行驶的车辆,对自动驾驶系统的功能进行测试和评估。
车辆-交通-环境在环实验室以其高效率、可控性和可重复性而闻名。它将成功满足高风险场景测试、容错测试等复杂测试的需求,助力实现恶劣天气条件下的自动驾驶安全。
IAE
在MIL中,具有车辆动力学、传感器、交通和环境模型的测试系统完美集成于仿真环境。SIL利用实际软件实现来替换控制模型,以进行软件代码测试和验证。
HIL结合硬件和软件测试,可支持包括控制器硬件、传感器(如毫米波雷达、摄像头等)和执行器(x-by-wire系统)的测试。
DIL 使用人机交互来唤起、测量、建模并理解人类、智能网联车辆以及道路基础设施之间的复杂关系。
先进的整车在环测试实验室有助于在整车层面实现安全、可重复和高效率的功能测试。
VIL结合仿真和真实试验场测试,利用仿真工具创建基于场景的测试用例,并将虚拟交通场景注入真实行驶的车辆,对自动驾驶系统的功能进行测试和评估。
车辆-交通-环境在环实验室以其高效率、可控性和可重复性而闻名。它将成功满足高风险场景测试、容错测试等复杂测试的需求,助力实现恶劣天气条件下的自动驾驶安全。
IAE



编辑推荐




最新资讯
-
全国汽车标准化技术委员会汽车节能分技术委
2025-04-18 17:34
-
我国联合牵头由DC/DC变换器供电的低压电气
2025-04-18 17:33
-
中国汽研牵头的首个ITU-T国际标准正式立项
2025-04-18 17:32
-
为什么要进行汽车以太网接收测试?汽车以太
2025-04-18 17:26
-
产品手册下载 | NI 全新USB数据采集-NI mio
2025-04-18 16:39
