




 广告
广告





















































基于偏置度的车辆追尾碰撞损伤控制研究
2021-08-02 14:12:16· 来源:AUTO行家

摘 要为使车辆追尾碰撞时造成的经济损伤最小,本文以某一具体车型为例,对其发生的追尾交通事故进行数据筛选和统计,分析车辆碰撞时的速度、偏置度等因素对碰撞
摘 要
为使车辆追尾碰撞时造成的经济损伤最小,本文以某一具体车型为例,对其发生的追尾交通事故进行数据筛选和统计,分析车辆碰撞时的速度、偏置度等因素对碰撞损伤的具体影响,结果表明其碰撞时的速度,偏置度等都会影响碰撞时碰撞部件的形状变化和能量吸收,进而影响碰撞时车辆的损伤情况,本文以碰撞时造成的经济损失作为衡量碰撞损伤大小的一个标准,建立其与速度及偏置度的模型并绘制碰撞损失特性曲线。基于特性曲线分析可知,车辆不同的碰撞初速度对应着最佳偏置度使得碰撞损伤最小,进而提出了不同速度下的车辆追尾碰撞最佳偏置度控制策略,并以PID控制对车辆的方向盘转角和横摆角速度进行修正来改变汽车碰撞前的偏置度,保证车辆在碰撞时处于最佳偏置度附近。仿真及计算结果表明,该控制策略能准确调整车辆的偏置度从而减少汽车追尾碰撞时的经济损伤,可以为车辆追尾碰撞中的损伤优化策略提供借鉴和参考。
关键字:交通工程; 追尾碰撞; 偏置度; 碰撞损失; 控制策略
作者:姚明* ,柴红杰,李建军
单位: 江苏大学汽车与交通工程学院
引 言
追尾碰撞事故一直是公路上的多发事故类型,由于碰撞速度和车身变形较大,往往带给驾驶员较为严重的人身伤亡和财产损伤。追尾碰撞时汽车的运动学参数及追尾场景的不同对汽车碰撞损伤的影响尤为重要,在对汽车碰撞损伤的分析中,主要是对碰撞发生后车辆的形变量进行考虑和分析,并基于形变量来建立以动量法和能量法为基础的碰撞模型,然后通过交通事故勘测到的数据来分析和判断碰撞所造成的经济损伤。
近年来,针对汽车碰撞的研究也在日益增加,文献[1]对整车正面碰撞进行了有限元仿真分析,建立了汽车正面刚性壁碰撞仿真模型,通过对碰撞中质量及能量曲线的判断来分析仿真的可靠性,对碰撞部件的变形及吸能情况等进行评价,并以减轻重量为目的,对发动机罩的结构进行改进,改善了汽车碰撞的安全性。文献[2]建立了汽车小偏置碰撞的仿真模型,对整车变形过程、碰撞速度、加速度、侵入量和关键结构部件变形进行分析,将混合元胞自动机方法应用到车身结构的优化中,使车身结构有了更好的性能。文献[3]选取某款SUV 车型来研究不同重叠率,不同撞击角度下追尾碰撞对机动车安全性能的影响,对比不同工况下的整个碰撞系统的吸能情况及主要部件的变形情况对车内乘员安全性能做出分析。文献[4]利用飞机和汽车的相似性理论,选取某款车型对特定速度下的汽车碰撞损伤进行了研究,并给出了碰撞速度和碰撞损伤之间的关系特性,为碰撞损伤的研究提供了新的思路。文献[5]对高速公路上二百多起交通事故进行了统计分析,建立了高速公路追尾危险度的计算方法,并对追尾工况的影响因素进行了筛选,在此基础上提出了高速公路追尾事故预防对策,提高了汽车在高速公路追尾场景下行驶的安全性。文献[6]为实现车辆的自主避撞,提出一种基于线性路径跟踪控制的换道避撞控制策略,根据车辆期望横向加速度和期望横向位移的变化特性,采用五次多项式法来规划符合驾驶人特性的避撞路径,有效减少了追尾冲突下碰撞事故的发生。
但是,以上对汽车追尾碰撞的研究中对汽车在碰撞时的车辆行为轨迹调控和不同碰撞场景下所造成的车辆损伤方面考虑较少[7-9],没有深入研究碰撞部件在不同交通场景下发生碰撞的概率和碰撞后对本车造成的经济损伤,且未考虑到不同偏置度对汽车碰撞损伤的影响以及相应的控制策略。
针对这一现状,本文选取某一具体车型的模拟碰撞数据,分析不同偏置度碰撞场景下影响汽车碰撞损伤的因素,并根据影响因素建立速度和碰撞损伤模型,以碰撞后经济损失最小为优化目标来对碰撞场景下的车辆行为进行提前干预和调控,以保护碰撞场景下驾驶人的财产安全。
偏置追尾碰撞场景的建立
在实际事故中,汽车的追尾碰撞大多为偏置追尾碰撞,且在碰撞过程中,由于碰撞发生时车辆的碰撞速度,碰撞位置和初始条件的千差万别,会造成汽车不同程度的损坏。一般情况下,汽车碰撞部件为吸收动能而产生的形变量也会随着碰撞强度的增大而增加。而要想精确评估在此碰撞过程中的车辆损伤,就需要结合实际情况分析。根据汽车碰撞领域相关学者的研究,汽车由于其自身设计、材料、结构布局的不同在不同偏置度、速度发生碰撞时,其造成的碰撞损伤与碰撞速度、碰撞的综合形变量等是存在一定规律性的,这种规律性实际上就是汽车的碰撞损伤特性。
理论上任何一辆汽车都有其相应的碰撞损伤特性,都可以借助事故发生后的交通事故数据及保险理赔数据[10]以及相关碰撞试验的结果来辅助分析汽车的损伤特性。而在对碰撞损伤进行量化和评判时,在汽车碰撞领域一般用碰撞时对部件变形量所造成的经济损失作为标准。本文在对某一具体车型碰撞数据进行统计分析发现,汽车的追尾碰撞损失主要受偏置度、碰撞部件的价值、部件碰撞的概率、速度及部件的损伤程度等影响,因此有必要对这些因素进行深入分析,并建立相应理论模型。
要想准确评估碰撞场景下汽车的损伤特性,对追尾场景下汽车的碰撞部件和碰撞面积的大小进行预估分析显得尤为重要。因此,为了能准确表示追尾场景下两车碰撞重叠面积,本文引入了偏置度的概念,汽车偏置度的定义如图1 所示。
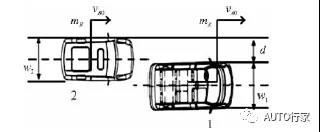
图1 偏置度示意图
由此得到偏置度的表达式:

式中: w2 为本车身宽度,d 为车辆发生追尾时,前车相对于后车的偏置距离,φ 为偏置度。
汽车碰撞损伤的影响因素
对某车型收集到的追尾碰撞数据进行处理分析可以得到影响汽车碰撞损伤的因素有: 碰撞部件及碰撞面积及碰撞部件的碰撞概率及碰撞部件的价值及损伤程度等。在本文中,用各主要碰撞部件的经济损失总和来代替整车的碰撞损伤。
对统计数据处理分析发现,在追尾碰撞过程中,一般车身前部的前围板,保险杠,引擎罩等都会出现一定程度的塑性变形。而且,汽车的碰撞部件会随偏置度的变化而有所不同,当偏置度大于50%时,汽车主要碰撞部件为发动机舱,保险杠和前纵梁等;当偏置度在0~50%范围内时,主要碰撞部件有发动机舱,保险杠,前纵梁和车门,车立柱等。而在不同偏置度下,碰撞部件的综合形变量及损伤程度也会有很大差异。因此,要计算车辆的碰撞损失,就要对车辆在不同偏置度下的碰撞部件,碰撞面积,损伤程度等进行深入的分析。
一般来说,汽车碰撞部位的变形量就等于该部件碰撞前后尺寸之差[11]。而在汽车碰撞这一领域,为了给碰撞部件的形变量一个确切的评判标准,通常采用CRASH 准则来评估车辆各个碰撞部位的形变量。即将碰撞区域划分为六个均匀的标定点,用该碰撞部件的5 个变形区域来近似表达车辆碰撞后的变形轮廓。为了更好地进行说明,以碰撞部件为车辆前端引擎盖为例,如图2 所示,对车辆前端引擎盖碰撞区域进行划分,在其剖面的变形轮廓上均匀测量6 个点,即C1,C2,C3,C4,C5,C6,则六点测量法计算的引擎盖综合形变量可由式( 2) 表示为:

式中: c 为碰撞部件综合变形量( mm) ,C1、C2、C3、C4、C5、C6 为标定点变形量( mm) 。
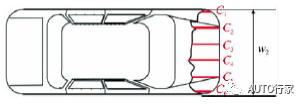
图2 形变量测量图
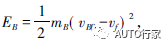
在碰撞发生时,两车的速度会在车辆碰撞形变量最大时达到相同,设质量为mA,速度为vA0的A 车与质量为mB 速度为vB0的B 车发生追尾碰撞,B 车为追尾车,A 车为被追尾车,在碰撞的过程中,直到两车具有相同的速度时,碰撞形变量达到最大值。设相同的速度为vf,碰撞过程根据动量定理,有:
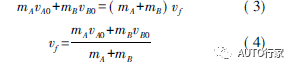
而在碰撞过程中,常用汽车碰撞前后的速度变化值来计算碰撞过程中的能量变化[7],在碰撞过程中,B 车的动能能量损失即为
Campbell 根据碰撞试验数据得到汽车前端完全碰撞固定刚性墙壁时的速度和碰撞后的残余变形成线性关系,公式表示为[8]:

式中: vB0为碰撞前速度,K 为汽车的刚度系数,c 为变形量。
以式( 5) 为基础,进一步推导出单位宽度上的碰撞力与汽车的变形量成正比,其数学表达式如下所示[9]:

式中: P 为单位汽车宽度所承受的碰撞力( N/m) ; c为变形量( m) ; A 为没有塑性变形时单位宽度的碰撞力( N/m) ; B 为线性关系的斜率( N/m2 ) 。
设碰撞宽度为w0,在汽车碰撞宽度上做积分,则在碰撞宽度上所受的碰撞力为:

假设汽车的变形在同一宽度上表现一致,对式( 7) 在损伤宽度和深度上作两次积分,得到形变势能的损失能量E2 的数学表达式为:

由式( 1) 可知,汽车的碰撞宽度:

因为在碰撞过程中,损失的动能不会全部转化为汽车的变形能,本文中假设发生碰撞损伤时的动能转化率为80%,则有EB = E2 ×0.8。在计算时通常选用A = 435.6 N/m,B = 2.96 N/m2,本文采用常用数据。
数据分析结果表明: 在碰撞发生时,在同一偏置度下,不同碰撞速度对碰撞部件的综合变形量的影响很大,碰撞部件综合变形量随碰撞速度的增大而增加。
在同一碰撞速度下,偏置度对汽车碰撞部件的综合形变量起着重要作用,本文从某一同车型500个模拟事故数据中筛选所研究车型在不同碰撞速度下的碰撞部件综合形变量,并根据数据拟合[13]得到偏置度与碰撞部件综合形变量之间的变化趋势如图3 所示。
在95%的置信区间内求得在不同速度下碰撞部件形变量与偏置度的关系如式( 10) 所示。
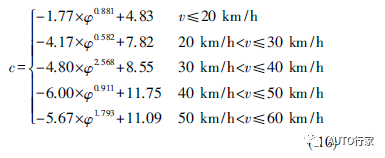
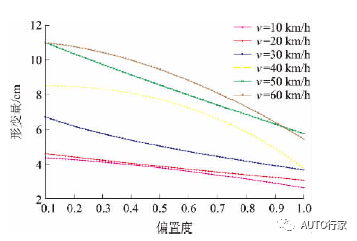
图3 综合形变量偏置度变化趋势图
由图3 可以知道: 在碰撞速度一定的情况下,车辆碰撞部件的综合形变量并不是随偏置度的增大而线性降低,其原因在于,当偏置度增加时,汽车碰撞面积也增加,会分担一部分冲击力,对应的碰撞部件也会增多,此时就会出现综合形变量变小的情况。
因此,在进行碰撞损失评估时,除了要考虑碰撞瞬间车辆的相对速度外,还要考虑碰撞部件的损伤程度,以及碰撞面积、碰撞部件的碰撞概率等参数。碰撞面积是指汽车发生碰撞时碰撞部件由变形造成的损伤面积( 碰撞宽度与碰撞部件综合形变量的乘积) ,碰撞概率是指在碰撞场景下部件发生碰撞的概率[4]。
在碰撞发生前碰撞部件的面积用Ap 来表示,其可以从汽车设计图纸及出厂说明中获得; 发生碰撞时造成部件损伤的面积用Av 来表示,其表示碰撞部件的综合形变量与碰撞部件参与碰撞的宽度的乘积,即Av = c×li,li 为碰撞部件参与碰撞的宽度,当汽车碰撞时的偏置度确定时,则碰撞部件、碰撞部件参与碰撞的宽度也可大致确定。在追尾碰撞场景中,部件的碰撞概率用pi 表示,它可以通过交通事故采样的统计结果得到。计算方法为:

式中: n 为样本数据中该部件损坏的次数,N 为样本数据总数。
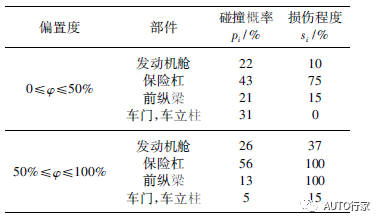
在追尾碰撞场景下碰撞部件的损伤程度不仅与部件自身的经济价值有关,也与部件在各个方向的碰撞概率有关。损伤程度的期望值可由统计数据得出。根据收集到的交通数据,对其不同偏置度下各主要部件的碰撞概率、损伤程度整理如表1 所示。
则汽车在给定条件下的碰撞总损失表示为:

即

式中: Ap 为碰撞部件碰撞前面积; ci 为碰撞时汽车碰撞部件的综合形变量; li 为碰撞部件参与碰撞的宽度; si 为损伤程度; pi 为部件的碰撞概率。
表1
由式( 12) 和式( 13) 可以看出,当车宽、损伤程度、碰撞概率等参数确定时,碰撞总损伤是关于速度和偏置度的函数,因此,以碰撞损伤为纵坐标,碰撞速度为横坐标,可以分析同一偏置度下的碰撞损伤与速度的关系。图4 为偏置度为100%时的速度与碰撞损失关系图。
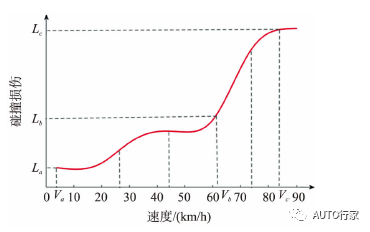
图4 100%偏置度碰撞损失曲线图
由图4 分析可知,当正面碰撞时,随着碰撞速度的增加碰撞损伤存在陡增区间。因此在高速碰撞时要及时介入控制策略对碰撞速度进行调控,使碰撞速度尽可能地降到突增速度点附近或以下,以减少碰撞损伤。
同理,根据该车型在不同偏置度时的碰撞交通数据,并对这些数据进行整理和分析,计算其在不同偏置度下碰撞损伤的起始速度,损伤突增速度和全损速度来绘制不同偏置度时的碰撞曲线趋势。
由图5 分析可知,不同偏置度下的碰撞损伤突增速度区间不同,在同一偏置度下,碰撞损伤随车速的增加而增大,而在小于43 km/h( A 点之前) 的碰撞速度下,偏置度越小则相应的碰撞损伤也越小,在碰撞速度为43 km/h ~ 63 km/h( A 点到C 点) 区间时,并不是碰撞时的偏置度越小碰撞损伤就对应减少,在这一范围内,偏置度60%时的碰撞损伤超过了偏置度为100%时的碰撞损伤,这是因为随着偏置度的增加,碰撞力的作用面积增大,碰撞部件变多,但碰撞中汽车的关键部件损伤减少。因此,在这一碰撞速度范围内,需要对车辆的偏置度进行干预调控,而在碰撞速度为60 km/h ~ 76km/h( B 点到D点) 区间内,偏置度为20%时的碰撞损伤超过了偏置度为40%时的碰撞损伤,此时也需要对车辆碰撞前的偏置度进行调控,使碰撞损伤减少到最低。

图5 不同偏置度下碰撞损伤特性曲线图
偏置度控制策略及实现
由上述分析可得,当车速在小于43 km/h 时或大于76 km/h 时( A 点之前及D 点之后) ,对车辆在即将追尾碰撞时,应对偏置度进行调控,使其尽可能处于取值较小的偏置度,而在B 点到D 点之间即60km/h~ 76 km/h 时要使车辆偏置度调控在40%左右,能够保证追尾碰撞的损伤最小。由于汽车在跟驶过程中,偏置度基本都接近100%,因此,要在碰撞发生前对车辆的偏置度即横向运动轨迹进行干预。本文主要研究在A 点之前,B 点和D 点区间内即小于43 m/h 和60 km/h ~ 76 km/h 时,对车辆的横向位移进行控制。
对碰撞前的车辆速度进行区间划分,制定干预控制条件如图6 所示。
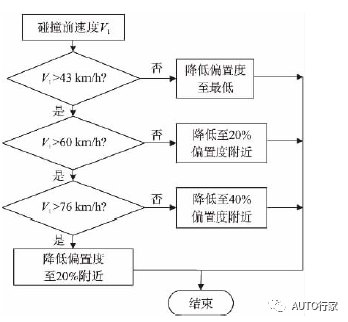
图6 速度检测逻辑框图
由图6 知: 当车速在不同的速度区间且即将发生碰撞时,需要对车辆的横向运动轨迹进行干预,使其偏置度取合适值,从而保证碰撞损伤最小。在对车辆横向运动轨迹分析时,以大地坐标系XOY 为参考系建立车辆模型,如图7 所示。
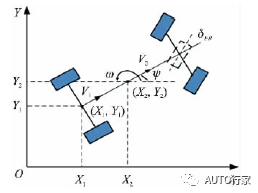
图7 车辆模型图
设车辆后轴中心点的坐标为( X1,Y1 ) ,中心点速度为V1,车辆的航向角为ψ,方向盘转角为δFB,横摆角速度为ω,假设轮胎存在线性侧偏特性,因此在对前后轴车轮进行等效分析时[14],建立如下车辆运动学模型:
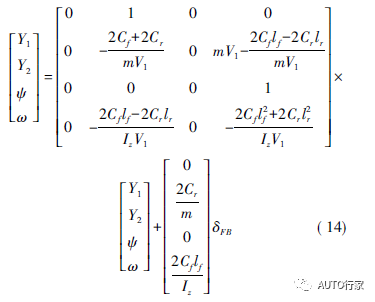
式中: Y1,Y2 为汽车质心在大地坐标系XOY 下的横向位置; ψ,δFB为车辆航向角与方向盘转角,ω 为车辆的横摆角速度,m 为车辆的质量,V1 为车辆质心处的速度,Cf,Cr 为车辆前后轴的侧偏刚度,lf,lr 为车辆前后轴的轴距; Iz 为车辆绕垂直方向的转动惯量。
由文献[15]知,横摆角速度可以控制车辆稳定性,方向盘转角可以控制车辆轨迹,要对车辆在碰撞前的横向运动轨迹进行调控,就要对车辆的方向盘转角和横摆角速度进行干预,其控制原理如图8所示。
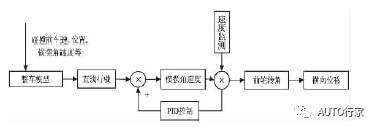
图8 车辆轨迹调控原理图
根据文献[6],车辆的期望方向盘转角为:
式中: γ 为车辆的横摆角,V1 为车辆的车速,tf 为运动时间,Y 为横向位移,X 为纵向位移;对期望方向盘转角和横摆角速度进行PID 控制修正,则有:

在Simulink 中搭建如图9 所示仿真模型,以本车横向位移和速度为输入,方向盘转角及横摆角速度为输出,分析其随时间变化的曲线如图10、图11所示。
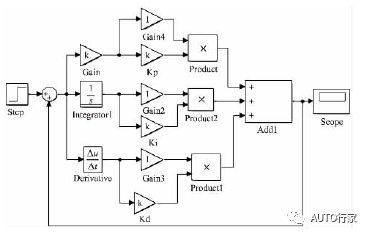
图9 仿真模型图
由图10 分析可知: 引入PID 控制的汽车横摆角速度在碰撞开始前能自动调节,使车辆处于不同的偏置度,且碰撞时的横摆角速度较无控制时的横摆角速度有了明显的降低,在碰撞结束后,其横摆角速度比无控制时更快趋于稳定状态,降低了二次碰撞的可能性,减少了碰撞损伤。
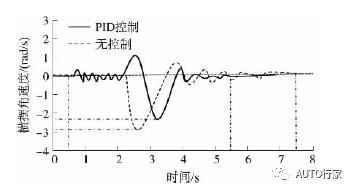
图10 横摆角速度与时间关系图
由图11 知: 方向盘转角在碰撞开始前有轻微的调整,引入PID 控制策略后碰撞时的方向盘转角减小,碰撞前方向盘转角调整使车辆处于碰撞损伤较小的偏置度下,且碰撞时间延后,在碰撞发生后,能更快的趋于稳定状态,减少碰撞损伤。

图11 方向盘转角与时间关系图
仿真模型的验证
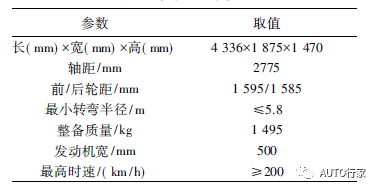
本文选取车速在60 km/h,偏置度在40%情况下进行仿真验证。该车型的基本参数如表2 所示。
表2 某车型基本参数
对该车型采用上述PID 控制策略干预其横向运动,仿真结果如表3 所示。
表3 控制前后参数对比表
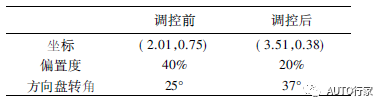
根据前文分析,选取此时汽车位置记为大地坐标系下XOY 坐标系下的( X1,Y1 ) ,Y1 为0.75 m,则利用PID 控制策略对车辆的横摆角速度和方向盘转角进行调整,其偏置度随时间变化情况如图12 所示,则碰撞损伤最小时偏置度为20%左右,即Y2 为0.38 m,设碰撞前调整时间为2 s,则求得碰撞前的横向位移为0.74 m,接近偏置度为40%,碰撞损伤下降了5.4%,验证了上述模型的有效性。
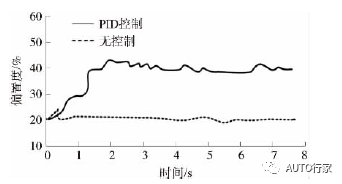
图12 偏置度随时间变化图
结论及展望
( 1) 本文通过对某车型500 例交通事故数据进行研究和分析,分析了速度和偏置度对碰撞损伤的影响,建立了不同偏置度下的该车型碰撞损伤特性模型,该模型表明,在不同的速度区间,有着碰撞损伤最小的最佳偏置度。
( 2) 基于碰撞前不同速度区间的碰撞损伤最佳偏置度,设计了调控车辆横摆角和方向盘转角的PID 控制策略并搭建了仿真模型,通过对比和实例验证,验证了该策略的有效性。
( 3) 本文在调控偏置度过程中调控方向盘转角来改变对横向位移是基于本车和前方目标车辆都匀速运动的理想工况下讨论的,并没有考虑车辆实际行驶过程中纵向的行驶工况; 同时,对改变偏置度过程中对横向车道的影响也未考虑。在后续的研究中还要对此做进一步的探讨。
参考文献
[1] 韩睿囡. 某车型正面100%刚性壁碰撞分析与结构改进研究[D]. 沈阳: 沈阳工业大学,2019.
[2] 孙博. 汽车小偏置碰撞仿真分析及拓扑优化设计[D]. 大连:大连理工大学,2018.
[3] 雷云涛. SUV 型汽车非全重叠多角度追尾碰撞安全性研究[D]. 兰州: 兰州交通大学,2019.
[4] 金佳钰. 汽车碰撞损失特性研究[D]. 沈阳: 沈阳航空航天大学,2018.
[5] 赵杨东. 高速公路追尾事故成因分析及预防对策研究[D]. 哈尔滨: 哈尔滨工业大学,2007.
[6] 刘志强,王一凡,吴雪刚,等. 基于线性路径跟踪控制的换道避撞控制策略研究[J]. 中国公路学报,2019,32( 6) : 86-95.
[7] 张俊. 汽车碰撞损失评估方法分析[J]. 科技风,2013( 23) : 51,53.
[8] Yu-Chiun Chiou,Lan L W,Chen W P. A Two-Stage Mining framework to Explore Key Risk Conditions on One-Vehicle Crash Severity[J]. Accident Analysis & Prevention,2013,50( JAN.) :405-415.
[9] Park H,Oh C. A Vehicle Speed Harmo-Nization Strategy for Minimizing Inter-Vehicle CrashRisks[J]. Accident Analysis & Prevention,2019,128( JUL.) : 230-239.
[10] http: / /www.catarc.ac.cn /ac2016 /conten.
[11] 余松. 基于车辆变形求解碰撞前速度的仿真分析[D]. 重庆: 重庆交通大学,2012.
[12] 马晓东. 汽车碰撞事故中碰撞角度对形变量的影响分析[J].中国新通信,2018,20( 24) : 209-211.
[13] 胡航宇. 非寿险损失分布拟合方法研究[J]. 科技信息,2011( 36) : 53-54.
[14] 高琳琳,戎辉,唐风敏,等. 自动驾驶汽车横向运动控制方法综述[J]. 汽车电器,2019( 9) : 1-4.
[15] 赵锋,金智林,冯博,等. 追尾碰撞的车辆稳定性分析与控制[J]. 重庆理工大学学报( 自然科学) ,2016,30( 5) : 20-26.
为使车辆追尾碰撞时造成的经济损伤最小,本文以某一具体车型为例,对其发生的追尾交通事故进行数据筛选和统计,分析车辆碰撞时的速度、偏置度等因素对碰撞损伤的具体影响,结果表明其碰撞时的速度,偏置度等都会影响碰撞时碰撞部件的形状变化和能量吸收,进而影响碰撞时车辆的损伤情况,本文以碰撞时造成的经济损失作为衡量碰撞损伤大小的一个标准,建立其与速度及偏置度的模型并绘制碰撞损失特性曲线。基于特性曲线分析可知,车辆不同的碰撞初速度对应着最佳偏置度使得碰撞损伤最小,进而提出了不同速度下的车辆追尾碰撞最佳偏置度控制策略,并以PID控制对车辆的方向盘转角和横摆角速度进行修正来改变汽车碰撞前的偏置度,保证车辆在碰撞时处于最佳偏置度附近。仿真及计算结果表明,该控制策略能准确调整车辆的偏置度从而减少汽车追尾碰撞时的经济损伤,可以为车辆追尾碰撞中的损伤优化策略提供借鉴和参考。
关键字:交通工程; 追尾碰撞; 偏置度; 碰撞损失; 控制策略
作者:姚明* ,柴红杰,李建军
单位: 江苏大学汽车与交通工程学院
引 言
追尾碰撞事故一直是公路上的多发事故类型,由于碰撞速度和车身变形较大,往往带给驾驶员较为严重的人身伤亡和财产损伤。追尾碰撞时汽车的运动学参数及追尾场景的不同对汽车碰撞损伤的影响尤为重要,在对汽车碰撞损伤的分析中,主要是对碰撞发生后车辆的形变量进行考虑和分析,并基于形变量来建立以动量法和能量法为基础的碰撞模型,然后通过交通事故勘测到的数据来分析和判断碰撞所造成的经济损伤。
近年来,针对汽车碰撞的研究也在日益增加,文献[1]对整车正面碰撞进行了有限元仿真分析,建立了汽车正面刚性壁碰撞仿真模型,通过对碰撞中质量及能量曲线的判断来分析仿真的可靠性,对碰撞部件的变形及吸能情况等进行评价,并以减轻重量为目的,对发动机罩的结构进行改进,改善了汽车碰撞的安全性。文献[2]建立了汽车小偏置碰撞的仿真模型,对整车变形过程、碰撞速度、加速度、侵入量和关键结构部件变形进行分析,将混合元胞自动机方法应用到车身结构的优化中,使车身结构有了更好的性能。文献[3]选取某款SUV 车型来研究不同重叠率,不同撞击角度下追尾碰撞对机动车安全性能的影响,对比不同工况下的整个碰撞系统的吸能情况及主要部件的变形情况对车内乘员安全性能做出分析。文献[4]利用飞机和汽车的相似性理论,选取某款车型对特定速度下的汽车碰撞损伤进行了研究,并给出了碰撞速度和碰撞损伤之间的关系特性,为碰撞损伤的研究提供了新的思路。文献[5]对高速公路上二百多起交通事故进行了统计分析,建立了高速公路追尾危险度的计算方法,并对追尾工况的影响因素进行了筛选,在此基础上提出了高速公路追尾事故预防对策,提高了汽车在高速公路追尾场景下行驶的安全性。文献[6]为实现车辆的自主避撞,提出一种基于线性路径跟踪控制的换道避撞控制策略,根据车辆期望横向加速度和期望横向位移的变化特性,采用五次多项式法来规划符合驾驶人特性的避撞路径,有效减少了追尾冲突下碰撞事故的发生。
但是,以上对汽车追尾碰撞的研究中对汽车在碰撞时的车辆行为轨迹调控和不同碰撞场景下所造成的车辆损伤方面考虑较少[7-9],没有深入研究碰撞部件在不同交通场景下发生碰撞的概率和碰撞后对本车造成的经济损伤,且未考虑到不同偏置度对汽车碰撞损伤的影响以及相应的控制策略。
针对这一现状,本文选取某一具体车型的模拟碰撞数据,分析不同偏置度碰撞场景下影响汽车碰撞损伤的因素,并根据影响因素建立速度和碰撞损伤模型,以碰撞后经济损失最小为优化目标来对碰撞场景下的车辆行为进行提前干预和调控,以保护碰撞场景下驾驶人的财产安全。
偏置追尾碰撞场景的建立
在实际事故中,汽车的追尾碰撞大多为偏置追尾碰撞,且在碰撞过程中,由于碰撞发生时车辆的碰撞速度,碰撞位置和初始条件的千差万别,会造成汽车不同程度的损坏。一般情况下,汽车碰撞部件为吸收动能而产生的形变量也会随着碰撞强度的增大而增加。而要想精确评估在此碰撞过程中的车辆损伤,就需要结合实际情况分析。根据汽车碰撞领域相关学者的研究,汽车由于其自身设计、材料、结构布局的不同在不同偏置度、速度发生碰撞时,其造成的碰撞损伤与碰撞速度、碰撞的综合形变量等是存在一定规律性的,这种规律性实际上就是汽车的碰撞损伤特性。
理论上任何一辆汽车都有其相应的碰撞损伤特性,都可以借助事故发生后的交通事故数据及保险理赔数据[10]以及相关碰撞试验的结果来辅助分析汽车的损伤特性。而在对碰撞损伤进行量化和评判时,在汽车碰撞领域一般用碰撞时对部件变形量所造成的经济损失作为标准。本文在对某一具体车型碰撞数据进行统计分析发现,汽车的追尾碰撞损失主要受偏置度、碰撞部件的价值、部件碰撞的概率、速度及部件的损伤程度等影响,因此有必要对这些因素进行深入分析,并建立相应理论模型。
要想准确评估碰撞场景下汽车的损伤特性,对追尾场景下汽车的碰撞部件和碰撞面积的大小进行预估分析显得尤为重要。因此,为了能准确表示追尾场景下两车碰撞重叠面积,本文引入了偏置度的概念,汽车偏置度的定义如图1 所示。
图1 偏置度示意图
由此得到偏置度的表达式:
式中: w2 为本车身宽度,d 为车辆发生追尾时,前车相对于后车的偏置距离,φ 为偏置度。
汽车碰撞损伤的影响因素
对某车型收集到的追尾碰撞数据进行处理分析可以得到影响汽车碰撞损伤的因素有: 碰撞部件及碰撞面积及碰撞部件的碰撞概率及碰撞部件的价值及损伤程度等。在本文中,用各主要碰撞部件的经济损失总和来代替整车的碰撞损伤。
对统计数据处理分析发现,在追尾碰撞过程中,一般车身前部的前围板,保险杠,引擎罩等都会出现一定程度的塑性变形。而且,汽车的碰撞部件会随偏置度的变化而有所不同,当偏置度大于50%时,汽车主要碰撞部件为发动机舱,保险杠和前纵梁等;当偏置度在0~50%范围内时,主要碰撞部件有发动机舱,保险杠,前纵梁和车门,车立柱等。而在不同偏置度下,碰撞部件的综合形变量及损伤程度也会有很大差异。因此,要计算车辆的碰撞损失,就要对车辆在不同偏置度下的碰撞部件,碰撞面积,损伤程度等进行深入的分析。
一般来说,汽车碰撞部位的变形量就等于该部件碰撞前后尺寸之差[11]。而在汽车碰撞这一领域,为了给碰撞部件的形变量一个确切的评判标准,通常采用CRASH 准则来评估车辆各个碰撞部位的形变量。即将碰撞区域划分为六个均匀的标定点,用该碰撞部件的5 个变形区域来近似表达车辆碰撞后的变形轮廓。为了更好地进行说明,以碰撞部件为车辆前端引擎盖为例,如图2 所示,对车辆前端引擎盖碰撞区域进行划分,在其剖面的变形轮廓上均匀测量6 个点,即C1,C2,C3,C4,C5,C6,则六点测量法计算的引擎盖综合形变量可由式( 2) 表示为:
式中: c 为碰撞部件综合变形量( mm) ,C1、C2、C3、C4、C5、C6 为标定点变形量( mm) 。
图2 形变量测量图
在碰撞发生时,两车的速度会在车辆碰撞形变量最大时达到相同,设质量为mA,速度为vA0的A 车与质量为mB 速度为vB0的B 车发生追尾碰撞,B 车为追尾车,A 车为被追尾车,在碰撞的过程中,直到两车具有相同的速度时,碰撞形变量达到最大值。设相同的速度为vf,碰撞过程根据动量定理,有:
而在碰撞过程中,常用汽车碰撞前后的速度变化值来计算碰撞过程中的能量变化[7],在碰撞过程中,B 车的动能能量损失即为
Campbell 根据碰撞试验数据得到汽车前端完全碰撞固定刚性墙壁时的速度和碰撞后的残余变形成线性关系,公式表示为[8]:
式中: vB0为碰撞前速度,K 为汽车的刚度系数,c 为变形量。
以式( 5) 为基础,进一步推导出单位宽度上的碰撞力与汽车的变形量成正比,其数学表达式如下所示[9]:
式中: P 为单位汽车宽度所承受的碰撞力( N/m) ; c为变形量( m) ; A 为没有塑性变形时单位宽度的碰撞力( N/m) ; B 为线性关系的斜率( N/m2 ) 。
设碰撞宽度为w0,在汽车碰撞宽度上做积分,则在碰撞宽度上所受的碰撞力为:
假设汽车的变形在同一宽度上表现一致,对式( 7) 在损伤宽度和深度上作两次积分,得到形变势能的损失能量E2 的数学表达式为:
由式( 1) 可知,汽车的碰撞宽度:
因为在碰撞过程中,损失的动能不会全部转化为汽车的变形能,本文中假设发生碰撞损伤时的动能转化率为80%,则有EB = E2 ×0.8。在计算时通常选用A = 435.6 N/m,B = 2.96 N/m2,本文采用常用数据。
数据分析结果表明: 在碰撞发生时,在同一偏置度下,不同碰撞速度对碰撞部件的综合变形量的影响很大,碰撞部件综合变形量随碰撞速度的增大而增加。
在同一碰撞速度下,偏置度对汽车碰撞部件的综合形变量起着重要作用,本文从某一同车型500个模拟事故数据中筛选所研究车型在不同碰撞速度下的碰撞部件综合形变量,并根据数据拟合[13]得到偏置度与碰撞部件综合形变量之间的变化趋势如图3 所示。
在95%的置信区间内求得在不同速度下碰撞部件形变量与偏置度的关系如式( 10) 所示。
图3 综合形变量偏置度变化趋势图
由图3 可以知道: 在碰撞速度一定的情况下,车辆碰撞部件的综合形变量并不是随偏置度的增大而线性降低,其原因在于,当偏置度增加时,汽车碰撞面积也增加,会分担一部分冲击力,对应的碰撞部件也会增多,此时就会出现综合形变量变小的情况。
因此,在进行碰撞损失评估时,除了要考虑碰撞瞬间车辆的相对速度外,还要考虑碰撞部件的损伤程度,以及碰撞面积、碰撞部件的碰撞概率等参数。碰撞面积是指汽车发生碰撞时碰撞部件由变形造成的损伤面积( 碰撞宽度与碰撞部件综合形变量的乘积) ,碰撞概率是指在碰撞场景下部件发生碰撞的概率[4]。
在碰撞发生前碰撞部件的面积用Ap 来表示,其可以从汽车设计图纸及出厂说明中获得; 发生碰撞时造成部件损伤的面积用Av 来表示,其表示碰撞部件的综合形变量与碰撞部件参与碰撞的宽度的乘积,即Av = c×li,li 为碰撞部件参与碰撞的宽度,当汽车碰撞时的偏置度确定时,则碰撞部件、碰撞部件参与碰撞的宽度也可大致确定。在追尾碰撞场景中,部件的碰撞概率用pi 表示,它可以通过交通事故采样的统计结果得到。计算方法为:
式中: n 为样本数据中该部件损坏的次数,N 为样本数据总数。
在追尾碰撞场景下碰撞部件的损伤程度不仅与部件自身的经济价值有关,也与部件在各个方向的碰撞概率有关。损伤程度的期望值可由统计数据得出。根据收集到的交通数据,对其不同偏置度下各主要部件的碰撞概率、损伤程度整理如表1 所示。
则汽车在给定条件下的碰撞总损失表示为:
即
式中: Ap 为碰撞部件碰撞前面积; ci 为碰撞时汽车碰撞部件的综合形变量; li 为碰撞部件参与碰撞的宽度; si 为损伤程度; pi 为部件的碰撞概率。
表1
由式( 12) 和式( 13) 可以看出,当车宽、损伤程度、碰撞概率等参数确定时,碰撞总损伤是关于速度和偏置度的函数,因此,以碰撞损伤为纵坐标,碰撞速度为横坐标,可以分析同一偏置度下的碰撞损伤与速度的关系。图4 为偏置度为100%时的速度与碰撞损失关系图。
图4 100%偏置度碰撞损失曲线图
由图4 分析可知,当正面碰撞时,随着碰撞速度的增加碰撞损伤存在陡增区间。因此在高速碰撞时要及时介入控制策略对碰撞速度进行调控,使碰撞速度尽可能地降到突增速度点附近或以下,以减少碰撞损伤。
同理,根据该车型在不同偏置度时的碰撞交通数据,并对这些数据进行整理和分析,计算其在不同偏置度下碰撞损伤的起始速度,损伤突增速度和全损速度来绘制不同偏置度时的碰撞曲线趋势。
由图5 分析可知,不同偏置度下的碰撞损伤突增速度区间不同,在同一偏置度下,碰撞损伤随车速的增加而增大,而在小于43 km/h( A 点之前) 的碰撞速度下,偏置度越小则相应的碰撞损伤也越小,在碰撞速度为43 km/h ~ 63 km/h( A 点到C 点) 区间时,并不是碰撞时的偏置度越小碰撞损伤就对应减少,在这一范围内,偏置度60%时的碰撞损伤超过了偏置度为100%时的碰撞损伤,这是因为随着偏置度的增加,碰撞力的作用面积增大,碰撞部件变多,但碰撞中汽车的关键部件损伤减少。因此,在这一碰撞速度范围内,需要对车辆的偏置度进行干预调控,而在碰撞速度为60 km/h ~ 76km/h( B 点到D点) 区间内,偏置度为20%时的碰撞损伤超过了偏置度为40%时的碰撞损伤,此时也需要对车辆碰撞前的偏置度进行调控,使碰撞损伤减少到最低。
图5 不同偏置度下碰撞损伤特性曲线图
偏置度控制策略及实现
由上述分析可得,当车速在小于43 km/h 时或大于76 km/h 时( A 点之前及D 点之后) ,对车辆在即将追尾碰撞时,应对偏置度进行调控,使其尽可能处于取值较小的偏置度,而在B 点到D 点之间即60km/h~ 76 km/h 时要使车辆偏置度调控在40%左右,能够保证追尾碰撞的损伤最小。由于汽车在跟驶过程中,偏置度基本都接近100%,因此,要在碰撞发生前对车辆的偏置度即横向运动轨迹进行干预。本文主要研究在A 点之前,B 点和D 点区间内即小于43 m/h 和60 km/h ~ 76 km/h 时,对车辆的横向位移进行控制。
对碰撞前的车辆速度进行区间划分,制定干预控制条件如图6 所示。
图6 速度检测逻辑框图
由图6 知: 当车速在不同的速度区间且即将发生碰撞时,需要对车辆的横向运动轨迹进行干预,使其偏置度取合适值,从而保证碰撞损伤最小。在对车辆横向运动轨迹分析时,以大地坐标系XOY 为参考系建立车辆模型,如图7 所示。
图7 车辆模型图
设车辆后轴中心点的坐标为( X1,Y1 ) ,中心点速度为V1,车辆的航向角为ψ,方向盘转角为δFB,横摆角速度为ω,假设轮胎存在线性侧偏特性,因此在对前后轴车轮进行等效分析时[14],建立如下车辆运动学模型:
式中: Y1,Y2 为汽车质心在大地坐标系XOY 下的横向位置; ψ,δFB为车辆航向角与方向盘转角,ω 为车辆的横摆角速度,m 为车辆的质量,V1 为车辆质心处的速度,Cf,Cr 为车辆前后轴的侧偏刚度,lf,lr 为车辆前后轴的轴距; Iz 为车辆绕垂直方向的转动惯量。
由文献[15]知,横摆角速度可以控制车辆稳定性,方向盘转角可以控制车辆轨迹,要对车辆在碰撞前的横向运动轨迹进行调控,就要对车辆的方向盘转角和横摆角速度进行干预,其控制原理如图8所示。
图8 车辆轨迹调控原理图
根据文献[6],车辆的期望方向盘转角为:
式中: γ 为车辆的横摆角,V1 为车辆的车速,tf 为运动时间,Y 为横向位移,X 为纵向位移;对期望方向盘转角和横摆角速度进行PID 控制修正,则有:
在Simulink 中搭建如图9 所示仿真模型,以本车横向位移和速度为输入,方向盘转角及横摆角速度为输出,分析其随时间变化的曲线如图10、图11所示。
图9 仿真模型图
由图10 分析可知: 引入PID 控制的汽车横摆角速度在碰撞开始前能自动调节,使车辆处于不同的偏置度,且碰撞时的横摆角速度较无控制时的横摆角速度有了明显的降低,在碰撞结束后,其横摆角速度比无控制时更快趋于稳定状态,降低了二次碰撞的可能性,减少了碰撞损伤。
图10 横摆角速度与时间关系图
由图11 知: 方向盘转角在碰撞开始前有轻微的调整,引入PID 控制策略后碰撞时的方向盘转角减小,碰撞前方向盘转角调整使车辆处于碰撞损伤较小的偏置度下,且碰撞时间延后,在碰撞发生后,能更快的趋于稳定状态,减少碰撞损伤。
图11 方向盘转角与时间关系图
仿真模型的验证
本文选取车速在60 km/h,偏置度在40%情况下进行仿真验证。该车型的基本参数如表2 所示。
表2 某车型基本参数
对该车型采用上述PID 控制策略干预其横向运动,仿真结果如表3 所示。
表3 控制前后参数对比表
根据前文分析,选取此时汽车位置记为大地坐标系下XOY 坐标系下的( X1,Y1 ) ,Y1 为0.75 m,则利用PID 控制策略对车辆的横摆角速度和方向盘转角进行调整,其偏置度随时间变化情况如图12 所示,则碰撞损伤最小时偏置度为20%左右,即Y2 为0.38 m,设碰撞前调整时间为2 s,则求得碰撞前的横向位移为0.74 m,接近偏置度为40%,碰撞损伤下降了5.4%,验证了上述模型的有效性。
图12 偏置度随时间变化图
结论及展望
( 1) 本文通过对某车型500 例交通事故数据进行研究和分析,分析了速度和偏置度对碰撞损伤的影响,建立了不同偏置度下的该车型碰撞损伤特性模型,该模型表明,在不同的速度区间,有着碰撞损伤最小的最佳偏置度。
( 2) 基于碰撞前不同速度区间的碰撞损伤最佳偏置度,设计了调控车辆横摆角和方向盘转角的PID 控制策略并搭建了仿真模型,通过对比和实例验证,验证了该策略的有效性。
( 3) 本文在调控偏置度过程中调控方向盘转角来改变对横向位移是基于本车和前方目标车辆都匀速运动的理想工况下讨论的,并没有考虑车辆实际行驶过程中纵向的行驶工况; 同时,对改变偏置度过程中对横向车道的影响也未考虑。在后续的研究中还要对此做进一步的探讨。
参考文献
[1] 韩睿囡. 某车型正面100%刚性壁碰撞分析与结构改进研究[D]. 沈阳: 沈阳工业大学,2019.
[2] 孙博. 汽车小偏置碰撞仿真分析及拓扑优化设计[D]. 大连:大连理工大学,2018.
[3] 雷云涛. SUV 型汽车非全重叠多角度追尾碰撞安全性研究[D]. 兰州: 兰州交通大学,2019.
[4] 金佳钰. 汽车碰撞损失特性研究[D]. 沈阳: 沈阳航空航天大学,2018.
[5] 赵杨东. 高速公路追尾事故成因分析及预防对策研究[D]. 哈尔滨: 哈尔滨工业大学,2007.
[6] 刘志强,王一凡,吴雪刚,等. 基于线性路径跟踪控制的换道避撞控制策略研究[J]. 中国公路学报,2019,32( 6) : 86-95.
[7] 张俊. 汽车碰撞损失评估方法分析[J]. 科技风,2013( 23) : 51,53.
[8] Yu-Chiun Chiou,Lan L W,Chen W P. A Two-Stage Mining framework to Explore Key Risk Conditions on One-Vehicle Crash Severity[J]. Accident Analysis & Prevention,2013,50( JAN.) :405-415.
[9] Park H,Oh C. A Vehicle Speed Harmo-Nization Strategy for Minimizing Inter-Vehicle CrashRisks[J]. Accident Analysis & Prevention,2019,128( JUL.) : 230-239.
[10] http: / /www.catarc.ac.cn /ac2016 /conten.
[11] 余松. 基于车辆变形求解碰撞前速度的仿真分析[D]. 重庆: 重庆交通大学,2012.
[12] 马晓东. 汽车碰撞事故中碰撞角度对形变量的影响分析[J].中国新通信,2018,20( 24) : 209-211.
[13] 胡航宇. 非寿险损失分布拟合方法研究[J]. 科技信息,2011( 36) : 53-54.
[14] 高琳琳,戎辉,唐风敏,等. 自动驾驶汽车横向运动控制方法综述[J]. 汽车电器,2019( 9) : 1-4.
[15] 赵锋,金智林,冯博,等. 追尾碰撞的车辆稳定性分析与控制[J]. 重庆理工大学学报( 自然科学) ,2016,30( 5) : 20-26.







最新资讯
-
大卓智能端到端直播实测,16公里复杂路段挑
2025-04-25 17:16
-
《汽车轮胎耐撞击性能试验方法-车辆法》等
2025-04-25 11:45
-
“真实”而精确的能量流测试:电动汽车能效
2025-04-25 11:44
-
GRAS助力中国高校科研升级
2025-04-25 10:25
-
梅赛德斯-AMG使用VI-CarRealTime开发其控制
2025-04-25 10:21
