




 广告
广告





















































并联式混合动力汽车及其能量管理策略简介
2021-08-02 23:23:01· 来源:AutoAero 作者:简杰松

1.1 混合动力汽车简介当今社会需要引起重视和急需解决的两个重要问题是能源危机和环境污染[1]。就地区而言,亚太地区是世界上能源消费量最大的地区,中国,日本
1.1 混合动力汽车简介
当今社会需要引起重视和急需解决的两个重要问题是能源危机和环境污染[1]。就地区而言,亚太地区是世界上能源消费量最大的地区,中国,日本和韩国等是主要消费国;其次是北美。其中,汽车消耗的能源占比最大,目前,汽车消耗的石油资源约占55%。所以仅仅呼吁低碳出行是远远不够的,更应该对汽车进行研究,以达到减少污染物排放的目的。随着环境污染的越来越严重,由此环保标准也变得越来越苛刻,传统的燃油汽车已难以满足要求,而由于新能源的技术和成本限制,新能源的汽车发展缓慢,纯电动汽车成本较高且续航里程短,充电设施铺盖不足。此时,正在稳定发展的混合动力汽车技术正可以填补汽车行业的缺陷,并作为过渡。
根据混合动力汽车的动力耦合形式,可分为串联式、并联式和混联式混合动力汽车。串联式混合动力汽车的结构如图 1 所示,它包括发动机、电机两种动力源。发动机和电机串联在一起,组成车辆的驱动系统。
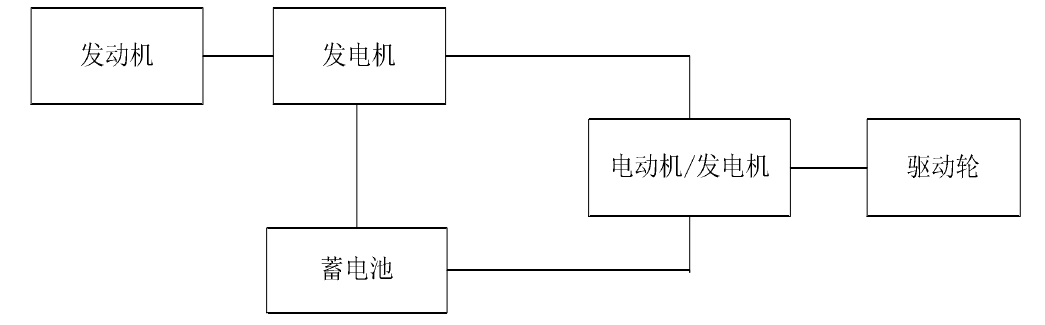
图1.串联混合动力汽车的结构图
串联混合动力汽车与车辆的驱动轴之间没有机械连接,发动机的工作点不会受到车辆行驶工况的影响,因此它可以一直地工作在最佳工况点附近,发动机的效率较高。但是由于发动机在驱动车辆行驶时,发动机发出的能量要经过两次能量转换的问题,能量损失严重,故效率较低。
并联混合动力汽车的结构如图2所示。它主要由发动机、转矩耦合器、蓄电池以及电动机四个模块组成。
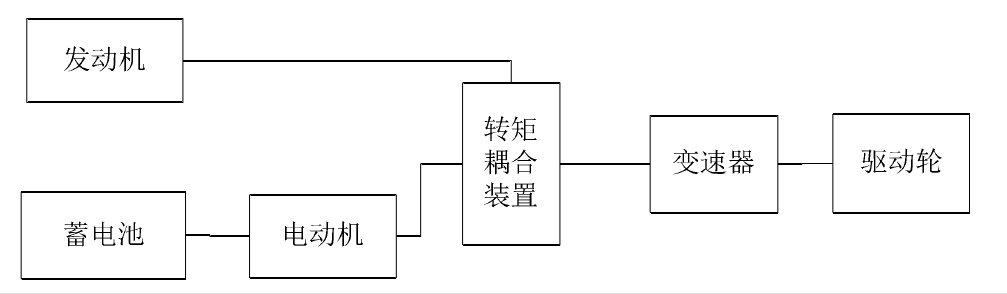
图2.并联式混合动力汽车结构图
并联式混合动力汽车以发动机作为主动力装置,电机作为辅助动力装置,其结构决定了控制的灵活性,通用的控制思想是当车辆在怠速、低速等小功率工况下运行时,关闭发动机,只采用电机驱动;当发动机处于工作的高效区时,发动机单独驱动;在车辆需要大功率输出如爬坡、急加速时,电机协助发动机驱动车辆。由于功率可以叠加,发动机和配备较小功率的电机也可以获得比较满意的动力性能,而且通过电机的“消峰填谷”作用,可以使发动机较多的工作高效区。其缺点是结构比较复杂,同时控制难度增加。
如图3可以看出:混联式混合动力汽车的动力系统综合了串联式和并联式,因此它又叫做串—并联混合动力汽车,它通过转矩耦合器协调控制驱动力传动系统,可以实现在串联模式和并联模式之间进行自由的切换。
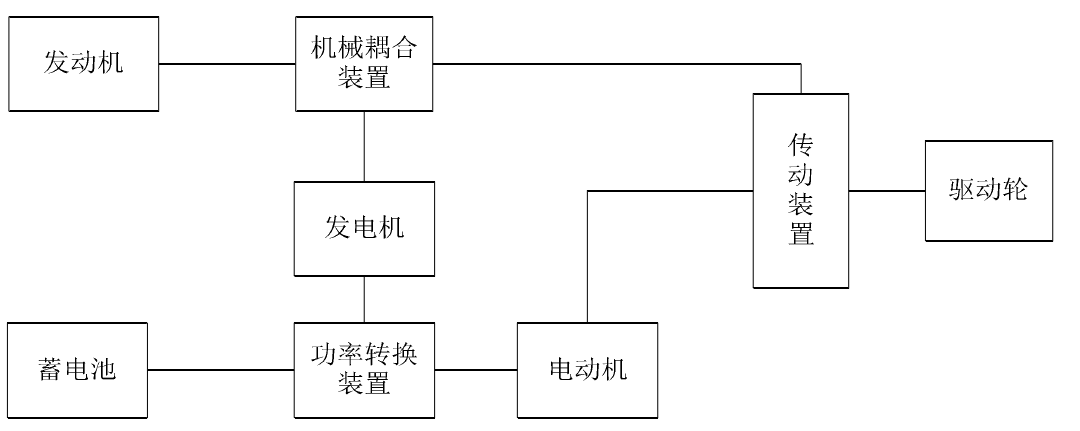
图3. 串—并联式混合动力汽车结构图
1.2 能量管理策略现状
作为一种新型的多能量源交通工具,混合动力汽车的性能与其采用的能量管理策略密切相关,能量管理策略是传统燃油汽车与纯电动汽车完美结合的纽带,是混合动力汽车成败的最终决定性因素。能量管理策略根据驾驶员的操作,如加速踏板、制动踏板等,判断驾驶员的意图,在满足车辆动力性能的前提下,最优的分配电机、发动机、动力电池等部件的功率输出,实现能量的最优分配,提高车辆的燃油经济性和排放性能。能量管理策略是迄今为止混合动力汽车领域研究最多、文献最丰富的内容之一。以下介绍并联式混合汽车的能量管理策略。
并联式混合动力汽车有发动机和电机两类动力源,能量管理策略实现发动机和电机转矩目标值的合理分配,目前常用的有基于规则的能量管理策略、实时优化能量管理策略、全局优化能量管理策略等。
1.2.1 基于规则的能量管理策略
基于规则的能量管理策略通常以车速、需求转矩、动力电池荷电状态( State of charge,SOC)、发动机转速等为逻辑门限参数,在逻辑门限参数构成的多维空间中划分出多种工作模式[1]。当逻辑门限参数值满足预设的规则时,切换混合动力系统工作模式。主要思想是调整发动机的工作点,通过控制电机输出扭矩的大小,使得发动机的扭矩输出(工作点)落在发动机的高效率区间内。基于规则的能量管理策略算法简单,对控制器计算性能要求低,在实际中得到了较为广泛的应用。基于规则的策略又分为确定性规则和模糊规则,这里的模糊规则概念来源于模糊控制器,即人们在表述某件事情时,往往只给出一个模糊性的说法。
井济民,王旭东等针对单轴并联式混合动力轿车,以混合驱动系统需求转矩和电池剩余电量(SOC)为输入,以发动机需求转矩为输出,构建了能量管理模糊控制器,基于ADVISOR的仿真研究表明,模糊控制策略与传统的逻辑门控制策略相比,能够更有效地降低混合动力汽车的燃油消耗和排放,更好地控制电池组SOC的变化[2]。田甜等在Matlab/Simulink软件中建立了基于模糊PID控制的驾驶员模型,以CUISER和Matlab/Simulink为仿真平台,对传统型与单轴并联混合动力汽车的燃油经济性进行仿真验证[3]。付主木,王聪慧等利用Matlab/simulink 建立了并联式混合动力汽车模糊控制能量管理算法,并将该算法嵌入到Advisor软件的PHEV模型中进行仿真和对比分析[4]。雷将华等在Matlab/Simulink环境下,用ADVISOR作为仿真平台,分别建立了并联式混合动力汽车的各个模块的模型,研究、分析逻辑门限控制策略,给出并联混合动力总成控制系统结构框图与总成控制软件结构框图[5]。邱彬等在Matlab/Simulink仿真环境下,搭建同轴并联式混合动力城市客车的整车能耗模型以及能量管理策略模型。能量管理策略选取简便但更贴近实际应用的逻辑门限策略,以电池SOC值和动力源输出转矩作为主要的参考变量,设计了无主动充电的能量分配策略和有主动充电的能量分配策略两种能量分配策略[6]。李训明等在仿真软件Cruise中建立了整车仿真模型,在Stateflow中建立了基于规则的逻辑门限值控制策略,最后实现了Matlab与Cruise联合仿真[7]。李婷婷等在保持混合动力汽车动力性能的前提下,以整车需求转矩和蓄电池SOC为输入,以发动机转矩为输出的模糊控制器,选取了梯形隶属度函数,并建立了模糊控制规则;以发动机燃油消耗和排放为优化目标对模糊隶属度函数的参数进行了离线优化[8]。毛建中,张文等分析了并联式混合动力汽车电机和发动机功率的实时分配问题,根据发动机工作效率图制定模糊控制规则,并以发动机工作效率为优化目标,利用蚁群算法对模糊隶属度函数参数进行优化[9]。于浩等在AVL/CRUISE仿真软件中搭建该混合动力卡车的仿真模型,设计了基于逻辑门限值的能量管理策略,在MATLAB/Simulink平台中搭建了混合动力汽车控制策略模型,以汽车油耗最低为目标,制定电池荷电状态及其上下限和车辆需求转矩作为逻辑门限值参数[10]。
基于规则的能量管理策略研究初期,以发动机效率最高为准则,确定模式切换规则,提高燃油经济性。随着研究的深入,逐步考虑混合动力系统总效率、排放性等,对逻辑门限参数阈值进行优化,并采用模糊控制将模式切换规则模糊化,进一步提高整车性能。基于规则的能量管理策略对车辆的循环工况以及参数漂移的适应能力差,在规则的设定时,只重点得考虑了发动机的燃油经济性。另外,只要蓄电池的SOC 低于了设定的门限值就充电,没有考虑蓄电池的充放电损失。
1.2.2 实时优化能量管理策略
实时优化能量管理策略通过定义实时优化目标函数,根据当前系统的动力需求作为输入,满足动力源及电池等部件的物理约束,采用优化算法求解下一时刻的控制变量,不需要预先知道行驶工况,可在线优化并且能够应用于实时控制系统,故又称为在线优化策略[29]。
在某一瞬时车辆工况下,实时计算出满足车辆当前工况的需求扭矩,然后计算发动机和电机理论上的输出扭矩,之后运算得出发动机此时的燃油消耗量和电机此时的电耗量。实时优化算法最为经典的就是等效燃油消耗最少(Equivalent Consumption Minimization Strategy),后续的自适应等效燃油消耗最小(A-ECMS)也都是在此基础上进行改进。
朱庆林等提出一个以基于等效油耗最低控制策略(ECMS, Instantaneous Equivalent Consumption Minimization Strategy)为核心的系统研究方法,对混合动力汽车参数匹配方案的节能潜力和控制策略参数匹配方案对节能潜力的发挥程度进行研究,并根据获得的瞬时优化控制策略的控制规则建立新的实时控制策略[11]。徐萍萍等采用一个小波神经网络控制器,结合瞬时优化控制策略得到的控制规则进行训练,实现对混合动力系统的实时控制,基于ADVISOR的仿真研究表明,该控制策略不仅能够保证车辆的燃油经济性,而且克服了瞬时优化控制策略难以实时控制的缺点[12]。佟尚锷等设计了基于发动机最优工作曲线的逻辑门限能量管理策略,进而基于等效燃油消耗最少算法提出了一种实时优化能量管理策略,通过实时仿真对所提出的能量管理策略进行验证和评价,结果表明提出的能量管理策略方法正确,具有良好的实时性[13]。徐曼等采用了基于瞬时等效油耗最低的(Instantaneous Equivalent Consumption Minimization Strategy,ECMS)瞬时优化算法,ECMS算法将电池充放电过程中消耗的能量等效为相应的发动机油耗,以最少等效油耗为目标函数,建立瞬时优化能量管理策略,同时在Simulink环境下对整车的燃油消耗量进行了理论计算,并在相同条件下与逻辑门限算法的油耗进行比较[14]。张聪等首次将二次型最优控制理论应用于HEV能量管理问题,旨在提出与未来道路工况无关且节油效果与基于最小值原理(Pontryagin’s minimum principle,PMP)的全局最优控制策略相接近的实时功率优化分配策略[15]。胡正凯等以一款并联插电式混合动力汽车为研究对象,为提高其燃油经济性,基于等效油耗最低策略,提出一种自适应能量管理策略。仿真结果表明,与CD-CS策略相比,所提出自适应能量管理策略能够提高燃油经济性[16]。孙芳科等以单轴并联式混合动力汽车为研究对象,以等效燃油最小控制策略ECMS为理论基础,以提高整车燃油经济性为目标,提出了基于混合动力系统瞬时油耗率最低的能量管理策略,并对其在不同的行驶工况下适应性进行分析和研究[17]。荆培杨等主要研究对象为并联混合动力汽车(Parallel Hybrid Electric Vehicle,PHEV),采用瞬时能量控制理论为基础,利用蚁群算法对充放电等效因子进行寻优[18]。
虽然瞬时优化控制策略能确保每个瞬时工况的燃油最低或者效率最高,但这不代表全局的效率最优和排放最小,而且实时优化控制策略计算时间也比较长。
1.2.3 全局优化能量管理策略
在给定明确的行驶工况时,针对该给定循环工况,运用最优控制原则对多个动力源进行全局优化、动态分配的方法即为全局优化的能量管理策略。全局优化使在给定工况下,混合动力整车达到了动力性和燃油经济性的最佳平衡。全局优化的方法是,通过判断动力部件的目标状态,然后分析当前运行工况,采取一定的控制算法寻找达到目标状态的最优路径,实现整车的燃油经济性最优化。动态规划算法DP(Dynamic Programming)、模拟退火算法和多岛遗传算法、是现阶段全局优化策略中的主流算法。
胡红斐等以并联式混合动力电动汽车(PHEV)为研究对象,基于其整车及动力总成相关数学模型建立了以整个行驶工况消耗的总燃油量最小为目标的系统目标泛函,以及相关的机械特性、蓄电池电量保持等约束条件方程,然后采用Lagrange乘子法将有约束的极小值问题转化为无约束的极小值问题进行求解,得到PHEV的全局优化控制策略[19]。吴剑等首先建立了以混合动力系统需求转矩和电池组荷电状态(SOC)为输入,发动机转矩命令为输出的模糊控制器用于混合动力系统能量分配,然后针对模糊控制器的隶属度函数和模糊控制规则的选取主要依靠专家经验,带有较大的主观性等缺陷,采用粒子群算法优化模糊控制器中的隶属度函数参数和模糊控制规则[20]。张平平等提出了应用离散动态规划算法求解PHEV燃油经济性的全局最优控制问题,以动力系统主要部件数学模型为基础,编写基于离散动态规划算法的全局最优控制程序,求解最优燃油经济性的理论值以及与其相对应的最优控制策略[21]。张炳力等针对并联式混合动力汽车(PHEV),以整个循环工况的燃油经济性最优为目标,运用离散动态规划算法,得到PHEV的全局最优控制策略。并通过在逆向计算中设置不满足条件的控制变量的收益函数为无限大的方法,来达到电池荷电状态平衡,最后建立Matlab/Simulink仿真模型,对获得的全局最优控制策略进行仿真验证[22]。钟宛余等在给定的典型城市道路循环工况(UDDS)条件下,运用动态规划(DP)方法对EMCS问题进行优化控制,得出全局最优的DP能量管理控制器,并在MATLAB/Simulink环境中对所得出的DP能量管理控制器进行仿真计算和实验,结果表明,所提出的能量管理策略与传统的基于规则的控制策略相比,燃油经济性提高了10.22%,同时发动机和电机效率都有相应的提高[23]。李高等采用基于粒子群优化算法的智能算法对建立的模糊控制器参数规则进行优化,进而对能量进行有效的分配,减少整车的油耗及尾气的排放,使得在满足汽车行驶性能的前提下,达到节油减排的目的[24]。李训明等在仿真软件Cruise中建立了整车仿真模型,为后续能量管理策略的研究开发提供了仿真平台,然后研究了基于动态规划的能量管理策略,以电池SOC和传动系传动比为状态变量,以发动机转矩和变速器档位为控制变量,建立了以燃油经济性为目标的最优控制数学模型[25]。盛杨等针对模糊控制器的设计主观性较强,无法达到最优的不足,利用一种改进的自适应遗传算法(Improved Adaptive Genetic Algorithm,IAGA)对模糊控制器隶属度函数参数和控制规则进行优化。在算法中设计一种评价指标反映每代种群较优个体的差异程度,用于改进交叉和变异概率,适应度函数中利用加权法把多目标优化问题变为单目标优化问题,使用集主客观因素的组合赋权法确定各目标权重值,其中主观赋权法采用一种基于熵的线性组合赋权法,客观赋权法采用熵权法,最后运用线性加权法进行组合[26]。张红党等以提高系统工作效率为目标,进行混合动力系统的全局优化控制研究,构建以系统工作效率最优为目标的非线性规划问题,并基于贝尔曼最优原理,采用动态规划算法实现最优控制序列的求解[27]。
这种控制策略在理论上可以找到真正意义上的最优解。但是,它需要基于一定的操作条件,例如具体的行驶工况,因此这样不能用于在线控制,导致它的实时性能很差。
目前,各种能量控制策略设计都不完善,所以有必要进行更深入的研究,设计出实用性强、效果佳的能量控制策略,使能量分配具有最优性、实时性。
参考文献
[1] 李明,胡博,葛帅帅,王欢。并联式混合动力汽车能量管理与模式切换控制研究[J]. 南京理工大学学报,2020,44(06):696-704.
[2] 井济民,王旭东.单轴并联式混合动力汽车能量分配的模糊控制策略研究[J]. 齐齐哈尔大学学报(自然科学版),2010,26(02):15-18.
[3] 田甜. 单轴并联式混合动力汽车能量管理策略的研究[D].南京林业大学,2011.
[4] 付主木,王聪慧,普杰信.PHEV模糊控制能量管理策略建模与仿真[J]. 系统仿真学报,2012,24(06):1314-1319.
[5] 雷将华. 并联混合动力汽车模糊逻辑控制策略的研究[D]. 武汉理工大学,2013.
[6] 邱彬. 混合动力城市客车能量管理策略及节能评价研究[D]. 清华大学,2014.
[7] 李训明. 并联式混合动力汽车能量分配策略优化研究[D]. 山东理工大学,2015.
[8] 李婷婷. 并联混合动力汽车模糊控制策略的优化[D]. 沈阳工业大学,2017.
[9] 毛建中,张文.并联式混合动力汽车模糊能量管理策略优化[J]. 可再生能源,2018,36(03):372-379.
[10] 于浩. 并联混合动力卡车能量管理策略优化研究[D]. 燕山大学,2019.
[11] 朱庆林. 基于瞬时优化的混合动力汽车控制策略研究[D]. 吉林大学,2009.
[12] 徐萍萍,宋建国,王雁峰,沈光地. 基于小波神经网络的混合动力汽车实时控制策略[J].系统仿真学报,2011,23(11):2455-2459.
[13] 佟尚锷. 并联混合动力汽车能量管理与D2P实时仿真研究[D]. 东北大学,2012.
[14] 徐曼. 并联式PHEV瞬时优化算法的节能效果研究[D]. 东北大学,2013.
[15] 张聪. 混合动力汽车实时能量优化管理策略研究[D]. 天津大学,2016.
[16] 胡正凯.并联式PHEV自适应能量管理策略研究[J]. 山东工业技术,2018(18):50-51
[17] 孙芳科. 混合动力汽车瞬时最优控制策略的研究[D]. 山东大学,2018.
[18] 荆培杨. 并联混合动力汽车等效燃油最小控制策略优化[D]. 大连海事大学,2020.
[19] 胡红斐,黄向东,罗玉涛,赵克刚.并联式混合动力电动汽车全局优化控制[J]. 华南理工大学学报(自然科学版),2006(04):28-32+37.
[20] 吴剑. 并联式混合动力汽车能量管理策略优化研究[D]. 山东大学,2008.
[21] 张平平. 并联式混合动力汽车控制策略的研究[D]. 合肥工业大学,2009.
[22] 张炳力,张平平,赵韩,田芳,徐小东,吴迪.基于离散动态规划的PHEV燃油经济性全局最优控制[J].汽车工程,2010,32(11):923-927.
[23] 钟宛余. 并联式混合动力汽车能量管理策略优化研究[D]. 广西工学院,2012.
[24] 李高. 并联式混合动力汽车能量优化管理策略的研究[D]. 湖南工业大学,2014.
[25] 李训明. 并联式混合动力汽车能量分配策略优化研究[D]. 山东理工大学,2015.
[26] 盛杨. 并联混合动力汽车能量优化策略研究[D]. 大连海事大学,2019.
[27] 张红党,施德华,杨宏图,王峰.基于工作效率最优的功率分流式混合动力系统控制策略研究[J]. 重庆理工大学学报(自然科学),2019,33(03):66-72.
[28] 李文广,冯国胜,马俊长.基于自适应模拟退火算法的HEV能量管理优化[J]. 农业装备与车辆工程,2021,59(04):31-35.
[29] 熊焕剑. CVT混合动力汽车实时优化能量管理策略研究[D]. 湖南大学, 2019.
当今社会需要引起重视和急需解决的两个重要问题是能源危机和环境污染[1]。就地区而言,亚太地区是世界上能源消费量最大的地区,中国,日本和韩国等是主要消费国;其次是北美。其中,汽车消耗的能源占比最大,目前,汽车消耗的石油资源约占55%。所以仅仅呼吁低碳出行是远远不够的,更应该对汽车进行研究,以达到减少污染物排放的目的。随着环境污染的越来越严重,由此环保标准也变得越来越苛刻,传统的燃油汽车已难以满足要求,而由于新能源的技术和成本限制,新能源的汽车发展缓慢,纯电动汽车成本较高且续航里程短,充电设施铺盖不足。此时,正在稳定发展的混合动力汽车技术正可以填补汽车行业的缺陷,并作为过渡。
根据混合动力汽车的动力耦合形式,可分为串联式、并联式和混联式混合动力汽车。串联式混合动力汽车的结构如图 1 所示,它包括发动机、电机两种动力源。发动机和电机串联在一起,组成车辆的驱动系统。
图1.串联混合动力汽车的结构图
串联混合动力汽车与车辆的驱动轴之间没有机械连接,发动机的工作点不会受到车辆行驶工况的影响,因此它可以一直地工作在最佳工况点附近,发动机的效率较高。但是由于发动机在驱动车辆行驶时,发动机发出的能量要经过两次能量转换的问题,能量损失严重,故效率较低。
并联混合动力汽车的结构如图2所示。它主要由发动机、转矩耦合器、蓄电池以及电动机四个模块组成。
图2.并联式混合动力汽车结构图
并联式混合动力汽车以发动机作为主动力装置,电机作为辅助动力装置,其结构决定了控制的灵活性,通用的控制思想是当车辆在怠速、低速等小功率工况下运行时,关闭发动机,只采用电机驱动;当发动机处于工作的高效区时,发动机单独驱动;在车辆需要大功率输出如爬坡、急加速时,电机协助发动机驱动车辆。由于功率可以叠加,发动机和配备较小功率的电机也可以获得比较满意的动力性能,而且通过电机的“消峰填谷”作用,可以使发动机较多的工作高效区。其缺点是结构比较复杂,同时控制难度增加。
如图3可以看出:混联式混合动力汽车的动力系统综合了串联式和并联式,因此它又叫做串—并联混合动力汽车,它通过转矩耦合器协调控制驱动力传动系统,可以实现在串联模式和并联模式之间进行自由的切换。
图3. 串—并联式混合动力汽车结构图
1.2 能量管理策略现状
作为一种新型的多能量源交通工具,混合动力汽车的性能与其采用的能量管理策略密切相关,能量管理策略是传统燃油汽车与纯电动汽车完美结合的纽带,是混合动力汽车成败的最终决定性因素。能量管理策略根据驾驶员的操作,如加速踏板、制动踏板等,判断驾驶员的意图,在满足车辆动力性能的前提下,最优的分配电机、发动机、动力电池等部件的功率输出,实现能量的最优分配,提高车辆的燃油经济性和排放性能。能量管理策略是迄今为止混合动力汽车领域研究最多、文献最丰富的内容之一。以下介绍并联式混合汽车的能量管理策略。
并联式混合动力汽车有发动机和电机两类动力源,能量管理策略实现发动机和电机转矩目标值的合理分配,目前常用的有基于规则的能量管理策略、实时优化能量管理策略、全局优化能量管理策略等。
1.2.1 基于规则的能量管理策略
基于规则的能量管理策略通常以车速、需求转矩、动力电池荷电状态( State of charge,SOC)、发动机转速等为逻辑门限参数,在逻辑门限参数构成的多维空间中划分出多种工作模式[1]。当逻辑门限参数值满足预设的规则时,切换混合动力系统工作模式。主要思想是调整发动机的工作点,通过控制电机输出扭矩的大小,使得发动机的扭矩输出(工作点)落在发动机的高效率区间内。基于规则的能量管理策略算法简单,对控制器计算性能要求低,在实际中得到了较为广泛的应用。基于规则的策略又分为确定性规则和模糊规则,这里的模糊规则概念来源于模糊控制器,即人们在表述某件事情时,往往只给出一个模糊性的说法。
井济民,王旭东等针对单轴并联式混合动力轿车,以混合驱动系统需求转矩和电池剩余电量(SOC)为输入,以发动机需求转矩为输出,构建了能量管理模糊控制器,基于ADVISOR的仿真研究表明,模糊控制策略与传统的逻辑门控制策略相比,能够更有效地降低混合动力汽车的燃油消耗和排放,更好地控制电池组SOC的变化[2]。田甜等在Matlab/Simulink软件中建立了基于模糊PID控制的驾驶员模型,以CUISER和Matlab/Simulink为仿真平台,对传统型与单轴并联混合动力汽车的燃油经济性进行仿真验证[3]。付主木,王聪慧等利用Matlab/simulink 建立了并联式混合动力汽车模糊控制能量管理算法,并将该算法嵌入到Advisor软件的PHEV模型中进行仿真和对比分析[4]。雷将华等在Matlab/Simulink环境下,用ADVISOR作为仿真平台,分别建立了并联式混合动力汽车的各个模块的模型,研究、分析逻辑门限控制策略,给出并联混合动力总成控制系统结构框图与总成控制软件结构框图[5]。邱彬等在Matlab/Simulink仿真环境下,搭建同轴并联式混合动力城市客车的整车能耗模型以及能量管理策略模型。能量管理策略选取简便但更贴近实际应用的逻辑门限策略,以电池SOC值和动力源输出转矩作为主要的参考变量,设计了无主动充电的能量分配策略和有主动充电的能量分配策略两种能量分配策略[6]。李训明等在仿真软件Cruise中建立了整车仿真模型,在Stateflow中建立了基于规则的逻辑门限值控制策略,最后实现了Matlab与Cruise联合仿真[7]。李婷婷等在保持混合动力汽车动力性能的前提下,以整车需求转矩和蓄电池SOC为输入,以发动机转矩为输出的模糊控制器,选取了梯形隶属度函数,并建立了模糊控制规则;以发动机燃油消耗和排放为优化目标对模糊隶属度函数的参数进行了离线优化[8]。毛建中,张文等分析了并联式混合动力汽车电机和发动机功率的实时分配问题,根据发动机工作效率图制定模糊控制规则,并以发动机工作效率为优化目标,利用蚁群算法对模糊隶属度函数参数进行优化[9]。于浩等在AVL/CRUISE仿真软件中搭建该混合动力卡车的仿真模型,设计了基于逻辑门限值的能量管理策略,在MATLAB/Simulink平台中搭建了混合动力汽车控制策略模型,以汽车油耗最低为目标,制定电池荷电状态及其上下限和车辆需求转矩作为逻辑门限值参数[10]。
基于规则的能量管理策略研究初期,以发动机效率最高为准则,确定模式切换规则,提高燃油经济性。随着研究的深入,逐步考虑混合动力系统总效率、排放性等,对逻辑门限参数阈值进行优化,并采用模糊控制将模式切换规则模糊化,进一步提高整车性能。基于规则的能量管理策略对车辆的循环工况以及参数漂移的适应能力差,在规则的设定时,只重点得考虑了发动机的燃油经济性。另外,只要蓄电池的SOC 低于了设定的门限值就充电,没有考虑蓄电池的充放电损失。
1.2.2 实时优化能量管理策略
实时优化能量管理策略通过定义实时优化目标函数,根据当前系统的动力需求作为输入,满足动力源及电池等部件的物理约束,采用优化算法求解下一时刻的控制变量,不需要预先知道行驶工况,可在线优化并且能够应用于实时控制系统,故又称为在线优化策略[29]。
在某一瞬时车辆工况下,实时计算出满足车辆当前工况的需求扭矩,然后计算发动机和电机理论上的输出扭矩,之后运算得出发动机此时的燃油消耗量和电机此时的电耗量。实时优化算法最为经典的就是等效燃油消耗最少(Equivalent Consumption Minimization Strategy),后续的自适应等效燃油消耗最小(A-ECMS)也都是在此基础上进行改进。
朱庆林等提出一个以基于等效油耗最低控制策略(ECMS, Instantaneous Equivalent Consumption Minimization Strategy)为核心的系统研究方法,对混合动力汽车参数匹配方案的节能潜力和控制策略参数匹配方案对节能潜力的发挥程度进行研究,并根据获得的瞬时优化控制策略的控制规则建立新的实时控制策略[11]。徐萍萍等采用一个小波神经网络控制器,结合瞬时优化控制策略得到的控制规则进行训练,实现对混合动力系统的实时控制,基于ADVISOR的仿真研究表明,该控制策略不仅能够保证车辆的燃油经济性,而且克服了瞬时优化控制策略难以实时控制的缺点[12]。佟尚锷等设计了基于发动机最优工作曲线的逻辑门限能量管理策略,进而基于等效燃油消耗最少算法提出了一种实时优化能量管理策略,通过实时仿真对所提出的能量管理策略进行验证和评价,结果表明提出的能量管理策略方法正确,具有良好的实时性[13]。徐曼等采用了基于瞬时等效油耗最低的(Instantaneous Equivalent Consumption Minimization Strategy,ECMS)瞬时优化算法,ECMS算法将电池充放电过程中消耗的能量等效为相应的发动机油耗,以最少等效油耗为目标函数,建立瞬时优化能量管理策略,同时在Simulink环境下对整车的燃油消耗量进行了理论计算,并在相同条件下与逻辑门限算法的油耗进行比较[14]。张聪等首次将二次型最优控制理论应用于HEV能量管理问题,旨在提出与未来道路工况无关且节油效果与基于最小值原理(Pontryagin’s minimum principle,PMP)的全局最优控制策略相接近的实时功率优化分配策略[15]。胡正凯等以一款并联插电式混合动力汽车为研究对象,为提高其燃油经济性,基于等效油耗最低策略,提出一种自适应能量管理策略。仿真结果表明,与CD-CS策略相比,所提出自适应能量管理策略能够提高燃油经济性[16]。孙芳科等以单轴并联式混合动力汽车为研究对象,以等效燃油最小控制策略ECMS为理论基础,以提高整车燃油经济性为目标,提出了基于混合动力系统瞬时油耗率最低的能量管理策略,并对其在不同的行驶工况下适应性进行分析和研究[17]。荆培杨等主要研究对象为并联混合动力汽车(Parallel Hybrid Electric Vehicle,PHEV),采用瞬时能量控制理论为基础,利用蚁群算法对充放电等效因子进行寻优[18]。
虽然瞬时优化控制策略能确保每个瞬时工况的燃油最低或者效率最高,但这不代表全局的效率最优和排放最小,而且实时优化控制策略计算时间也比较长。
1.2.3 全局优化能量管理策略
在给定明确的行驶工况时,针对该给定循环工况,运用最优控制原则对多个动力源进行全局优化、动态分配的方法即为全局优化的能量管理策略。全局优化使在给定工况下,混合动力整车达到了动力性和燃油经济性的最佳平衡。全局优化的方法是,通过判断动力部件的目标状态,然后分析当前运行工况,采取一定的控制算法寻找达到目标状态的最优路径,实现整车的燃油经济性最优化。动态规划算法DP(Dynamic Programming)、模拟退火算法和多岛遗传算法、是现阶段全局优化策略中的主流算法。
胡红斐等以并联式混合动力电动汽车(PHEV)为研究对象,基于其整车及动力总成相关数学模型建立了以整个行驶工况消耗的总燃油量最小为目标的系统目标泛函,以及相关的机械特性、蓄电池电量保持等约束条件方程,然后采用Lagrange乘子法将有约束的极小值问题转化为无约束的极小值问题进行求解,得到PHEV的全局优化控制策略[19]。吴剑等首先建立了以混合动力系统需求转矩和电池组荷电状态(SOC)为输入,发动机转矩命令为输出的模糊控制器用于混合动力系统能量分配,然后针对模糊控制器的隶属度函数和模糊控制规则的选取主要依靠专家经验,带有较大的主观性等缺陷,采用粒子群算法优化模糊控制器中的隶属度函数参数和模糊控制规则[20]。张平平等提出了应用离散动态规划算法求解PHEV燃油经济性的全局最优控制问题,以动力系统主要部件数学模型为基础,编写基于离散动态规划算法的全局最优控制程序,求解最优燃油经济性的理论值以及与其相对应的最优控制策略[21]。张炳力等针对并联式混合动力汽车(PHEV),以整个循环工况的燃油经济性最优为目标,运用离散动态规划算法,得到PHEV的全局最优控制策略。并通过在逆向计算中设置不满足条件的控制变量的收益函数为无限大的方法,来达到电池荷电状态平衡,最后建立Matlab/Simulink仿真模型,对获得的全局最优控制策略进行仿真验证[22]。钟宛余等在给定的典型城市道路循环工况(UDDS)条件下,运用动态规划(DP)方法对EMCS问题进行优化控制,得出全局最优的DP能量管理控制器,并在MATLAB/Simulink环境中对所得出的DP能量管理控制器进行仿真计算和实验,结果表明,所提出的能量管理策略与传统的基于规则的控制策略相比,燃油经济性提高了10.22%,同时发动机和电机效率都有相应的提高[23]。李高等采用基于粒子群优化算法的智能算法对建立的模糊控制器参数规则进行优化,进而对能量进行有效的分配,减少整车的油耗及尾气的排放,使得在满足汽车行驶性能的前提下,达到节油减排的目的[24]。李训明等在仿真软件Cruise中建立了整车仿真模型,为后续能量管理策略的研究开发提供了仿真平台,然后研究了基于动态规划的能量管理策略,以电池SOC和传动系传动比为状态变量,以发动机转矩和变速器档位为控制变量,建立了以燃油经济性为目标的最优控制数学模型[25]。盛杨等针对模糊控制器的设计主观性较强,无法达到最优的不足,利用一种改进的自适应遗传算法(Improved Adaptive Genetic Algorithm,IAGA)对模糊控制器隶属度函数参数和控制规则进行优化。在算法中设计一种评价指标反映每代种群较优个体的差异程度,用于改进交叉和变异概率,适应度函数中利用加权法把多目标优化问题变为单目标优化问题,使用集主客观因素的组合赋权法确定各目标权重值,其中主观赋权法采用一种基于熵的线性组合赋权法,客观赋权法采用熵权法,最后运用线性加权法进行组合[26]。张红党等以提高系统工作效率为目标,进行混合动力系统的全局优化控制研究,构建以系统工作效率最优为目标的非线性规划问题,并基于贝尔曼最优原理,采用动态规划算法实现最优控制序列的求解[27]。
这种控制策略在理论上可以找到真正意义上的最优解。但是,它需要基于一定的操作条件,例如具体的行驶工况,因此这样不能用于在线控制,导致它的实时性能很差。
目前,各种能量控制策略设计都不完善,所以有必要进行更深入的研究,设计出实用性强、效果佳的能量控制策略,使能量分配具有最优性、实时性。
参考文献
[1] 李明,胡博,葛帅帅,王欢。并联式混合动力汽车能量管理与模式切换控制研究[J]. 南京理工大学学报,2020,44(06):696-704.
[2] 井济民,王旭东.单轴并联式混合动力汽车能量分配的模糊控制策略研究[J]. 齐齐哈尔大学学报(自然科学版),2010,26(02):15-18.
[3] 田甜. 单轴并联式混合动力汽车能量管理策略的研究[D].南京林业大学,2011.
[4] 付主木,王聪慧,普杰信.PHEV模糊控制能量管理策略建模与仿真[J]. 系统仿真学报,2012,24(06):1314-1319.
[5] 雷将华. 并联混合动力汽车模糊逻辑控制策略的研究[D]. 武汉理工大学,2013.
[6] 邱彬. 混合动力城市客车能量管理策略及节能评价研究[D]. 清华大学,2014.
[7] 李训明. 并联式混合动力汽车能量分配策略优化研究[D]. 山东理工大学,2015.
[8] 李婷婷. 并联混合动力汽车模糊控制策略的优化[D]. 沈阳工业大学,2017.
[9] 毛建中,张文.并联式混合动力汽车模糊能量管理策略优化[J]. 可再生能源,2018,36(03):372-379.
[10] 于浩. 并联混合动力卡车能量管理策略优化研究[D]. 燕山大学,2019.
[11] 朱庆林. 基于瞬时优化的混合动力汽车控制策略研究[D]. 吉林大学,2009.
[12] 徐萍萍,宋建国,王雁峰,沈光地. 基于小波神经网络的混合动力汽车实时控制策略[J].系统仿真学报,2011,23(11):2455-2459.
[13] 佟尚锷. 并联混合动力汽车能量管理与D2P实时仿真研究[D]. 东北大学,2012.
[14] 徐曼. 并联式PHEV瞬时优化算法的节能效果研究[D]. 东北大学,2013.
[15] 张聪. 混合动力汽车实时能量优化管理策略研究[D]. 天津大学,2016.
[16] 胡正凯.并联式PHEV自适应能量管理策略研究[J]. 山东工业技术,2018(18):50-51
[17] 孙芳科. 混合动力汽车瞬时最优控制策略的研究[D]. 山东大学,2018.
[18] 荆培杨. 并联混合动力汽车等效燃油最小控制策略优化[D]. 大连海事大学,2020.
[19] 胡红斐,黄向东,罗玉涛,赵克刚.并联式混合动力电动汽车全局优化控制[J]. 华南理工大学学报(自然科学版),2006(04):28-32+37.
[20] 吴剑. 并联式混合动力汽车能量管理策略优化研究[D]. 山东大学,2008.
[21] 张平平. 并联式混合动力汽车控制策略的研究[D]. 合肥工业大学,2009.
[22] 张炳力,张平平,赵韩,田芳,徐小东,吴迪.基于离散动态规划的PHEV燃油经济性全局最优控制[J].汽车工程,2010,32(11):923-927.
[23] 钟宛余. 并联式混合动力汽车能量管理策略优化研究[D]. 广西工学院,2012.
[24] 李高. 并联式混合动力汽车能量优化管理策略的研究[D]. 湖南工业大学,2014.
[25] 李训明. 并联式混合动力汽车能量分配策略优化研究[D]. 山东理工大学,2015.
[26] 盛杨. 并联混合动力汽车能量优化策略研究[D]. 大连海事大学,2019.
[27] 张红党,施德华,杨宏图,王峰.基于工作效率最优的功率分流式混合动力系统控制策略研究[J]. 重庆理工大学学报(自然科学),2019,33(03):66-72.
[28] 李文广,冯国胜,马俊长.基于自适应模拟退火算法的HEV能量管理优化[J]. 农业装备与车辆工程,2021,59(04):31-35.
[29] 熊焕剑. CVT混合动力汽车实时优化能量管理策略研究[D]. 湖南大学, 2019.
- 下一篇:关于后排行李箱冲击试验及相关设计问题详解
- 上一篇:行人保护模块冲击器伤害简析



编辑推荐




最新资讯
-
大卓智能端到端直播实测,16公里复杂路段挑
2025-04-25 17:16
-
《汽车轮胎耐撞击性能试验方法-车辆法》等
2025-04-25 11:45
-
“真实”而精确的能量流测试:电动汽车能效
2025-04-25 11:44
-
GRAS助力中国高校科研升级
2025-04-25 10:25
-
梅赛德斯-AMG使用VI-CarRealTime开发其控制
2025-04-25 10:21
