




 广告
广告





















































汽车自动驾驶辅助系统电磁安全性研究
2021-08-27 11:21:46· 来源:中国汽研检测事业部 作者:陈睿,雷剑梅,毛嵩,张柏年,王淙

CAERI智库,专注于汽车领域知识的创建与分享,与行业对话,与世界对话。依托中国汽研的汽车技术研发能力、试验研究、检验检测等优势资源,推动汽车领域的研究与
CAERI智库,专注于汽车领域知识的创建与分享,与行业对话,与世界对话。依托中国汽研的汽车技术研发能力、试验研究、检验检测等优势资源,推动汽车领域的研究与创新,致力打造具有全球影响力的汽车智库。
摘要:为了对汽车自动驾驶辅助系统的电磁安全性测试方法进行探索,通过雷达目标模拟器实现了基于毫米波雷达的自动驾驶辅助系统(ACC、FCW)的电磁兼容测试。利用4台样车的试验验证了该测试方法的可行性,并证明了车辆的自动驾驶辅助系统存在一定的电磁兼容安全风险。
关键词:智能网联汽车;电磁安全;自动驾驶辅助系统;电磁兼容;电磁抗扰
引言
汽车自动驾驶辅助系统实现的功能有自适应巡航控制功能、前向碰撞预警功能、自动紧急刹车功能以及车道偏离预警功能等,经多次软硬件迭代,其功能、性能均达到较高水平[1]。随着人类社会和汽车工业电气化程度越来越高,车外、车内电磁环境日益复杂,汽车自动驾驶辅助系统面临的电磁兼容风险显而易见。在我国最新发布的汽车电磁兼容国家标准GB 34660-2017《道路车辆电磁兼容性要求和试验方法》中,首次提出了对道路车辆的电磁抗扰性的强制要求,此标准已经于2020年1月1日开始强制执行。但标准中缺乏对汽车自动驾驶辅助驾驶系统的电磁抗扰性能要求和试验方法,业界急需一套针对智能汽车的电磁兼容性能测试评价方法,以及时发现智能汽车可能存在的电磁兼容安全风险,进一步保障人民的生命财产安全[2]。
本文针对行业对于智能汽车自动驾驶辅助系统电磁安全性测试需求和痛点,提出了一套用于智能汽车电磁抗扰性能测试评价方法。在EMC半电波暗室内,增加用于激活汽车自适应巡航功能、前向碰撞预警功能的智能辅助设备,当被测车辆的试验工况稳定运行时,再按照GB 34660-2017中的试验方法对汽车自动驾驶辅助功能进行电磁抗扰试验,通过监控被测车辆的CAN信号和试验现象,对智能汽车电磁安全性进行分级评估[3-4]。
1 智能汽车电磁安全测试研究方法
智能汽车电磁抗扰性能测试方法相较于传统的汽车电磁抗扰性能测试方法有一定区别,这也是智能汽车电磁安全测试面临的挑战点[5]。智能汽车自动驾驶辅助系统,主要是分析基于毫米波雷达的自适应巡航控制功能(ACC)和前向碰撞预警功能(FCW)。要实现其电磁兼容性研究,则需结合场景和电磁兼容测试要求定义典型工况场景。
1.1 测试原理和方法
ACC/FCW功能电磁抗扰度测试基本原理和方法,如图1所示。
a.将雷达目标模拟器放置在被测车辆毫米波雷达前方1m左右,并将路径距离输入雷达目标模拟器以补偿传输路径损耗。
b.被测车辆与雷达目标模拟器中间放置中空的吸波暗箱,确保试验环境中无伪目标存在。
c.被测车辆毫米波雷达电磁波经过吸波暗箱传输至雷达目标模拟器,结合被测车辆ACC/FCW功能的功能控制逻辑,设置雷达目标模拟器的相对运动速度、相对距离和 RCS 等参数,雷达目标模拟器根据设置生成雷达回波,雷达回波再经过吸波暗箱返回至被测车辆雷达。
d.此时,激活被测车辆雷达,被测车辆的ACC/FCW功能将被稳定触发。
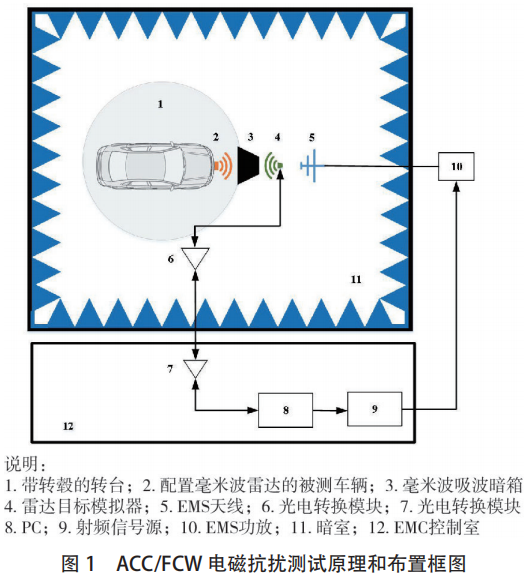
e.根据工况特点的不同,参考ISO 11451-2:2015或GB 34660-2017,选择测试频点、调制方式、驻留时间和频率步长,然后再依据选择的电磁抗扰测试方式对被测车辆进行电磁抗扰试验,试验过程中通过摄像头和麦克风监控被测车辆的试验状态,通过电脑监控被测车辆CAN信号;
f.根据监控的试验现象和CAN信号分析和判定被测车辆 ACC/FCW功能的电磁抗扰性能。
值得注意的是,为进行车辆ACC和FCW的电磁抗扰度试验,本试验在原有EMC测试系统上增加辅助仪器——雷达目标模拟器,通过参数设置,从而激活车辆的ACC或FCW功能。由于本试验的雷达目标模拟器放置在EMC暗室内辅助测试,需具备良好的电磁抗扰性能,确保其在测试过程中正常工作。
1.2 典型测试工况定义
(1)ACC典型测试工况
ACC典型工况主要是被测车辆能够识别前车,自适应跟随前车执行不同工况巡航,推荐的测试工况主要分为稳态匀速巡航工况和动态巡航工况。
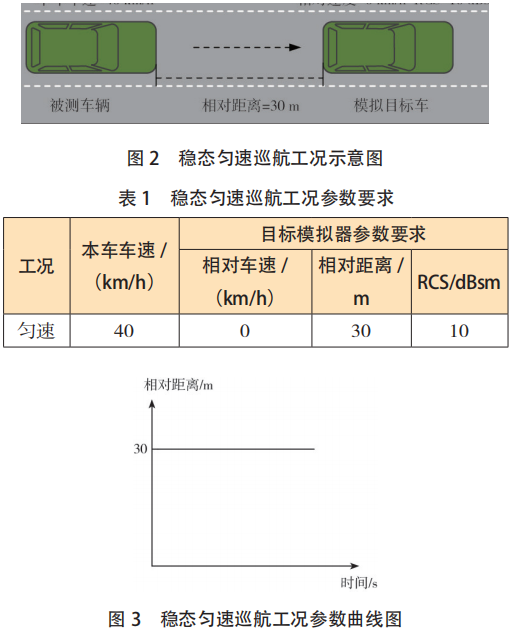
(a)稳态匀速巡航工况
图2为车辆稳态巡航工况示意图,目标车与被测车辆相对车速为0,相对距离保持30m不变,被测车辆以40km/h的速度运行后,按照表1调整目标模拟器参数设置,启动被测车辆ACC功能,使其进入稳态匀速巡航工况(见图 3)。
(b)动态巡航工况
图4为车辆动态巡航工况循环示意图,目标模拟车与被测车辆循环进行减速靠近、匀速跟车以及加速远离运动工况。按表2调整目标模拟器参数设置,使其能够实现符合图5要求的工况循环。被测车辆初始车速为40km/h,激活被测车辆ACC功能,被测车辆将跟随模拟目标车进行动态巡航。
(2)FCW 典型测试工况
FCW功能典型工况为前车紧急靠近触发被测车辆FCW功能。当模拟目标车与被测车辆的TTC(碰撞时间)满足FCW的触发条件时,可触发被测车辆的FCW功能。
试验前应关闭被测车辆ACC功能,保留FCW功能且功能处于待命状态。
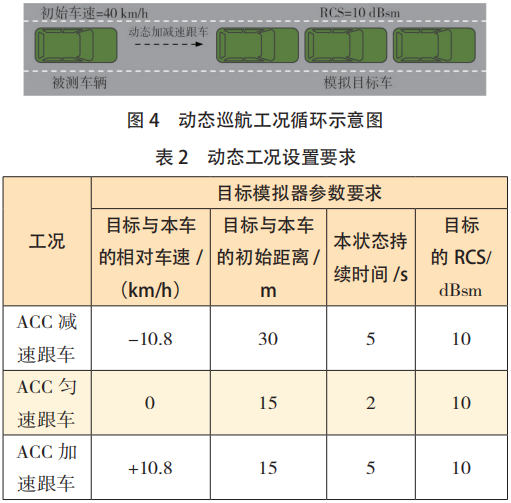
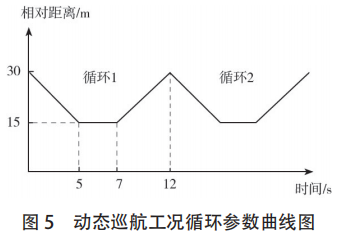
图6为前车碰撞预警工况示意图,描述模拟目标车快速靠近被测车辆的工况。根据车辆FCW功能逻辑,按表3设置本车车速和雷达目标模拟器的相对车速、相对距离、状态持续时间以及RCS等参数,使其能够实现符合图7要求的工况。
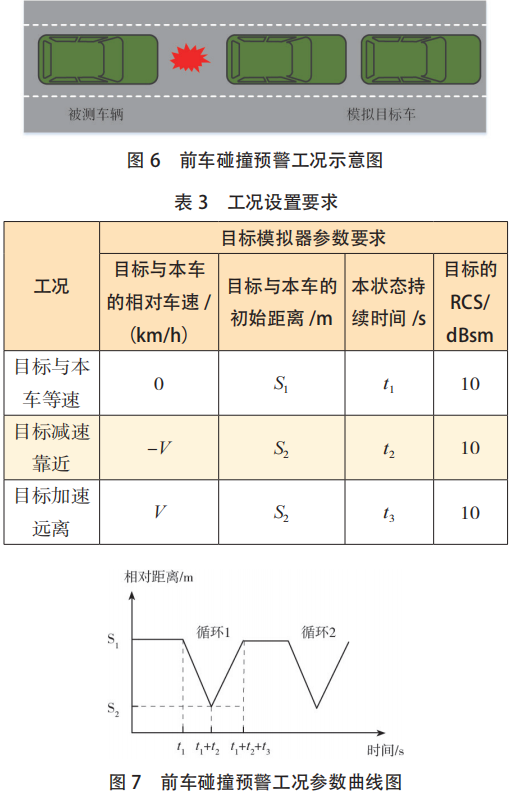
图7所示工况分为以下三个阶段:
目标与本车等速阶段,目标与被测车辆在相对距离S1处保持相对速度为0,持续时间t1。
目标减速靠近阶段,目标以相对速度-V靠近被测车辆,持续时间t2,V和t2应结合TTC进行设置,保证在此阶段能成功触发被测车辆的FCW功能,且不使车辆出现紧急制动。
目标加速远离阶段,目标以相对速度V远离被测车辆,持续时间t3(t3=t2),同时在目标远离阶段能使车辆正常退出FCW告警状态,回到正常行驶状态。
2 智能汽车电磁安全测试研究案例
本文依据上述测试原理和方法,选取4台样车进行了自动驾驶辅助系统电磁抗扰试验验证。电磁兼容试验参考ISO 11451-2:2015,试验频率范围为10 kHz~2 GHz,试验强度为100V/m。
ACC试验选择稳态巡航工况进行试验,FCW则根据被测车辆控制逻辑设置工况进行试验。图8和图9为某样车ACC功能电磁抗扰试验图和车内仪表显示图。图10和图11为某样车FCW功能电磁抗扰试验图和车内仪表功能状态显示图。
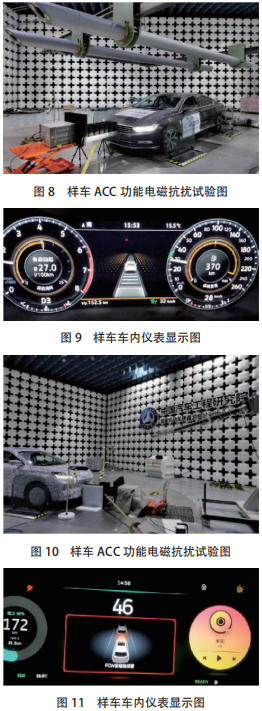
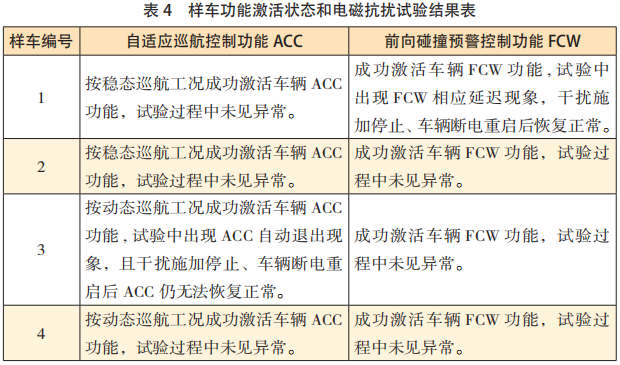
表4为四台样车的功能激活状态和电磁抗扰试验结果表。从验证试验案例可以看出,依据上述的实验原理和方法,可以通过雷达目标模拟器模拟目标前车运动状态,从而激活车辆的ACC和FCW功能,4台试验样中1台ACC功能出现异常,一台FCW功能出现性能降低或功能失效等异常现象。这表明汽车自动驾驶辅助系统存在一定电磁兼容安全风险,行业需提高对智能网联汽车电磁兼容性能的关注度,提升电磁兼容性能。
3 结语
本文分析了智能网联汽车存在的电磁安全风险和测试方法面临的挑战,提出了一种用于基于毫米波雷达的自动驾驶辅助系统(ACC和FCW)的电磁兼容测试原理和方法,并依据此原理和方法,对多辆样车进行了验证试验。实验现象和结果表明,此试验原理和方法可在EMC暗室内稳定激活车辆的自动驾驶辅助系统,且车辆的自动驾驶辅助系统存在一定的电磁兼容安全风险。
随着智能网联汽车的发展和普及,也出现越来越多种技术状态和功能的自动驾驶辅助系统。如基于摄像头的车道偏离预警系统,基于毫米波雷达和摄像头融合的全速自适应巡航控制系统,甚至基于激光雷达开发的自动驾驶辅助系统等。如何在EMC暗室内稳定地激活这些功能,将是下一步的研究重点,也是智能网联汽车电磁兼容测试面临的更大挑战。
从现有研究成果来看,智能网联汽车自动驾驶辅助系统的电磁安全不容忽视。从推动智能网联汽车产业落地和保护人民生命财产安全的角度来看,行业需要投入更多的资源对汽车自动驾驶辅助系统的电磁安全性进行深入研究,从而发现和解决安全风险,助力中国汽车工业“新四化”发展进程。
摘要:为了对汽车自动驾驶辅助系统的电磁安全性测试方法进行探索,通过雷达目标模拟器实现了基于毫米波雷达的自动驾驶辅助系统(ACC、FCW)的电磁兼容测试。利用4台样车的试验验证了该测试方法的可行性,并证明了车辆的自动驾驶辅助系统存在一定的电磁兼容安全风险。
关键词:智能网联汽车;电磁安全;自动驾驶辅助系统;电磁兼容;电磁抗扰
引言
汽车自动驾驶辅助系统实现的功能有自适应巡航控制功能、前向碰撞预警功能、自动紧急刹车功能以及车道偏离预警功能等,经多次软硬件迭代,其功能、性能均达到较高水平[1]。随着人类社会和汽车工业电气化程度越来越高,车外、车内电磁环境日益复杂,汽车自动驾驶辅助系统面临的电磁兼容风险显而易见。在我国最新发布的汽车电磁兼容国家标准GB 34660-2017《道路车辆电磁兼容性要求和试验方法》中,首次提出了对道路车辆的电磁抗扰性的强制要求,此标准已经于2020年1月1日开始强制执行。但标准中缺乏对汽车自动驾驶辅助驾驶系统的电磁抗扰性能要求和试验方法,业界急需一套针对智能汽车的电磁兼容性能测试评价方法,以及时发现智能汽车可能存在的电磁兼容安全风险,进一步保障人民的生命财产安全[2]。
本文针对行业对于智能汽车自动驾驶辅助系统电磁安全性测试需求和痛点,提出了一套用于智能汽车电磁抗扰性能测试评价方法。在EMC半电波暗室内,增加用于激活汽车自适应巡航功能、前向碰撞预警功能的智能辅助设备,当被测车辆的试验工况稳定运行时,再按照GB 34660-2017中的试验方法对汽车自动驾驶辅助功能进行电磁抗扰试验,通过监控被测车辆的CAN信号和试验现象,对智能汽车电磁安全性进行分级评估[3-4]。
1 智能汽车电磁安全测试研究方法
智能汽车电磁抗扰性能测试方法相较于传统的汽车电磁抗扰性能测试方法有一定区别,这也是智能汽车电磁安全测试面临的挑战点[5]。智能汽车自动驾驶辅助系统,主要是分析基于毫米波雷达的自适应巡航控制功能(ACC)和前向碰撞预警功能(FCW)。要实现其电磁兼容性研究,则需结合场景和电磁兼容测试要求定义典型工况场景。
1.1 测试原理和方法
ACC/FCW功能电磁抗扰度测试基本原理和方法,如图1所示。
a.将雷达目标模拟器放置在被测车辆毫米波雷达前方1m左右,并将路径距离输入雷达目标模拟器以补偿传输路径损耗。
b.被测车辆与雷达目标模拟器中间放置中空的吸波暗箱,确保试验环境中无伪目标存在。
c.被测车辆毫米波雷达电磁波经过吸波暗箱传输至雷达目标模拟器,结合被测车辆ACC/FCW功能的功能控制逻辑,设置雷达目标模拟器的相对运动速度、相对距离和 RCS 等参数,雷达目标模拟器根据设置生成雷达回波,雷达回波再经过吸波暗箱返回至被测车辆雷达。
d.此时,激活被测车辆雷达,被测车辆的ACC/FCW功能将被稳定触发。
e.根据工况特点的不同,参考ISO 11451-2:2015或GB 34660-2017,选择测试频点、调制方式、驻留时间和频率步长,然后再依据选择的电磁抗扰测试方式对被测车辆进行电磁抗扰试验,试验过程中通过摄像头和麦克风监控被测车辆的试验状态,通过电脑监控被测车辆CAN信号;
f.根据监控的试验现象和CAN信号分析和判定被测车辆 ACC/FCW功能的电磁抗扰性能。
值得注意的是,为进行车辆ACC和FCW的电磁抗扰度试验,本试验在原有EMC测试系统上增加辅助仪器——雷达目标模拟器,通过参数设置,从而激活车辆的ACC或FCW功能。由于本试验的雷达目标模拟器放置在EMC暗室内辅助测试,需具备良好的电磁抗扰性能,确保其在测试过程中正常工作。
1.2 典型测试工况定义
(1)ACC典型测试工况
ACC典型工况主要是被测车辆能够识别前车,自适应跟随前车执行不同工况巡航,推荐的测试工况主要分为稳态匀速巡航工况和动态巡航工况。
(a)稳态匀速巡航工况
图2为车辆稳态巡航工况示意图,目标车与被测车辆相对车速为0,相对距离保持30m不变,被测车辆以40km/h的速度运行后,按照表1调整目标模拟器参数设置,启动被测车辆ACC功能,使其进入稳态匀速巡航工况(见图 3)。
(b)动态巡航工况
图4为车辆动态巡航工况循环示意图,目标模拟车与被测车辆循环进行减速靠近、匀速跟车以及加速远离运动工况。按表2调整目标模拟器参数设置,使其能够实现符合图5要求的工况循环。被测车辆初始车速为40km/h,激活被测车辆ACC功能,被测车辆将跟随模拟目标车进行动态巡航。
(2)FCW 典型测试工况
FCW功能典型工况为前车紧急靠近触发被测车辆FCW功能。当模拟目标车与被测车辆的TTC(碰撞时间)满足FCW的触发条件时,可触发被测车辆的FCW功能。
试验前应关闭被测车辆ACC功能,保留FCW功能且功能处于待命状态。
图6为前车碰撞预警工况示意图,描述模拟目标车快速靠近被测车辆的工况。根据车辆FCW功能逻辑,按表3设置本车车速和雷达目标模拟器的相对车速、相对距离、状态持续时间以及RCS等参数,使其能够实现符合图7要求的工况。
图7所示工况分为以下三个阶段:
目标与本车等速阶段,目标与被测车辆在相对距离S1处保持相对速度为0,持续时间t1。
目标减速靠近阶段,目标以相对速度-V靠近被测车辆,持续时间t2,V和t2应结合TTC进行设置,保证在此阶段能成功触发被测车辆的FCW功能,且不使车辆出现紧急制动。
目标加速远离阶段,目标以相对速度V远离被测车辆,持续时间t3(t3=t2),同时在目标远离阶段能使车辆正常退出FCW告警状态,回到正常行驶状态。
2 智能汽车电磁安全测试研究案例
本文依据上述测试原理和方法,选取4台样车进行了自动驾驶辅助系统电磁抗扰试验验证。电磁兼容试验参考ISO 11451-2:2015,试验频率范围为10 kHz~2 GHz,试验强度为100V/m。
ACC试验选择稳态巡航工况进行试验,FCW则根据被测车辆控制逻辑设置工况进行试验。图8和图9为某样车ACC功能电磁抗扰试验图和车内仪表显示图。图10和图11为某样车FCW功能电磁抗扰试验图和车内仪表功能状态显示图。
表4为四台样车的功能激活状态和电磁抗扰试验结果表。从验证试验案例可以看出,依据上述的实验原理和方法,可以通过雷达目标模拟器模拟目标前车运动状态,从而激活车辆的ACC和FCW功能,4台试验样中1台ACC功能出现异常,一台FCW功能出现性能降低或功能失效等异常现象。这表明汽车自动驾驶辅助系统存在一定电磁兼容安全风险,行业需提高对智能网联汽车电磁兼容性能的关注度,提升电磁兼容性能。
3 结语
本文分析了智能网联汽车存在的电磁安全风险和测试方法面临的挑战,提出了一种用于基于毫米波雷达的自动驾驶辅助系统(ACC和FCW)的电磁兼容测试原理和方法,并依据此原理和方法,对多辆样车进行了验证试验。实验现象和结果表明,此试验原理和方法可在EMC暗室内稳定激活车辆的自动驾驶辅助系统,且车辆的自动驾驶辅助系统存在一定的电磁兼容安全风险。
随着智能网联汽车的发展和普及,也出现越来越多种技术状态和功能的自动驾驶辅助系统。如基于摄像头的车道偏离预警系统,基于毫米波雷达和摄像头融合的全速自适应巡航控制系统,甚至基于激光雷达开发的自动驾驶辅助系统等。如何在EMC暗室内稳定地激活这些功能,将是下一步的研究重点,也是智能网联汽车电磁兼容测试面临的更大挑战。
从现有研究成果来看,智能网联汽车自动驾驶辅助系统的电磁安全不容忽视。从推动智能网联汽车产业落地和保护人民生命财产安全的角度来看,行业需要投入更多的资源对汽车自动驾驶辅助系统的电磁安全性进行深入研究,从而发现和解决安全风险,助力中国汽车工业“新四化”发展进程。
- 下一篇:中国汽车座椅法规及试验介绍
- 上一篇:汽车座椅行李箱冲击试验解析







最新资讯
-
全国汽车标准化技术委员会汽车节能分技术委
2025-04-18 17:34
-
我国联合牵头由DC/DC变换器供电的低压电气
2025-04-18 17:33
-
中国汽研牵头的首个ITU-T国际标准正式立项
2025-04-18 17:32
-
为什么要进行汽车以太网接收测试?汽车以太
2025-04-18 17:26
-
产品手册下载 | NI 全新USB数据采集-NI mio
2025-04-18 16:39
