




 广告
广告





















































Tesla自动驾驶规划领域最新深度解析
2021-08-27 23:10:18· 来源:智车科技

导 读除了产品发布和人才招聘,Tesla AI Day还有很多的技术干货。本文包含规划难点分析、规划整体架构、换道方案、多车交互、轨迹平滑五方面深度解析。作为自动
导 读
除了产品发布和人才招聘,Tesla AI Day还有很多的技术干货。本文包含规划难点分析、规划整体架构、换道方案、多车交互、轨迹平滑五方面深度解析。
作为自动驾驶领域的领军企业,Tesla的一举一动无不吸引着从业者们的目光。就在最近,一年一度的Tesla AI Day的开展更是让广大自动驾驶行业的工程师们大饱眼福。所谓外行看热闹,内行看门道。文章《特斯拉AI Day | 人工智能,会不会是车企下一个十年的标配技术?》已经对特斯拉发布的新产品有了较为深度的介绍,本篇文章想从作者的自身领域出发,带大家深入解析一下Tesla最新的决策规划相关工作。
1 目前的规划难点
作为自动驾驶整套流程中的大脑,决策规划未来可能是自动驾驶中最具有挑战性的方向之一。任何时候,如果想让人们相信自动驾驶,将自己的生命交给机器,那么其中最重要的部分就是决策规划,一个好的规划模块能够带给乘坐者们类似于人类司机的驾驶体验,并且兼顾安全与效率。
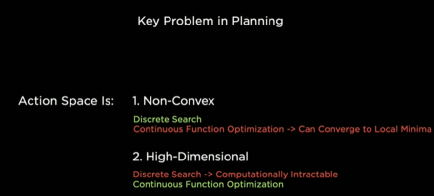
在AI DAY中,Tesla的规控模块负责人Ashok Elluswamy首先就给出了规划问题中的两大难点。第一就是很多时候,我们的规划搜索空间是非凸的,这样规划算法就会陷入局部最优。如何将实际道路上的场景构建成一个凸问题,是目前的规划瓶颈之一。第二,就是规划本身是在三维空间中进行的,这样的高维度会对算力提出很大的要求,如何利用算法来合理降维,也是一个困扰业界的难点。
这一上来指出的问题确实很犀利,也确实是作为规划从业者,目前被困扰最多的两大问题,目前学术界针对这两方面也有很多的相关工作发表。但比较可惜的是,Tesla在这次会上并没有说明他们是如何解决这两个问题的,也没有给出相应的论文。
2 规划整体架构
接下来,Ashok就简要介绍了一下目前Tesla所采用的规划架构。从中我们可以看出,整体流程还是比较常见的,规划分为两部分,首先是第一层粗略搜索,然后在凸空间内进行连续优化,从而得到平滑的轨迹。其实个人非常好奇凸空间是如何通过决策来得到的,这块应该是目前的难点。

从这张流程图以及后续演讲中出现的凸空间来看,Tesla采用的规划算法和百度Apollo的规划整体思路比较相近,都是通过数值优化的方式。这种算法的优势在于其可扩展性强,可很好地对实际道路场景进行建模,另外也可以通过学习的方法来不断对代价函数进行优化,从而提升规划的安全性和舒适性。
3 换道方案
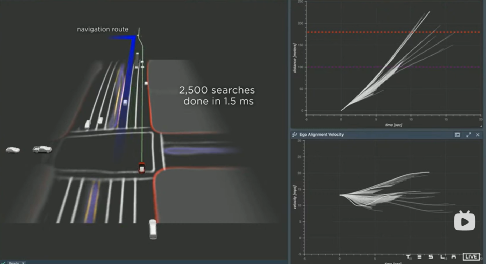
在演讲中,Ashok给出了实际的一个规划训练换道时机的例子。据他所说他们的规划算法可以在1.5ms 搜索2500次,在仿真中生成不同换道时机的轨迹后通过对轨迹的评价,选择最优的轨迹。
此处举例如下:第一条轨迹是提前换道并且缓慢行走,那么就会给乘客带来不舒适的体验,第二条轨迹是加速并且晚换道,但是会有在前面左转路口换道无法完成,无法实现导航要求,我们需要的是一条安全、舒适、效率平衡的轨迹,因此特斯拉生成大量轨迹(如下图右上方图),然后基于代价选择出最优的一条轨迹。
这块的学习训练过程中,我们就可以看出采取优化算法的优势,通过在仿真中进行大量的采样模拟,并且搭建一个合适的评价指标,可以收敛到一个兼顾安全和效率的最优轨迹出来。
4 多车交互
Tesla还讨论了为何要将路面上的其他交通参与者也考虑进决策中来。我们的自动驾驶车辆开在道路上,肯定会遇到其他交通参与者共同行驶的情况,而这时如果决策规划中不考虑其他交通参与者的行驶意图,那么规划出的路径肯定是不安全,不平顺的。
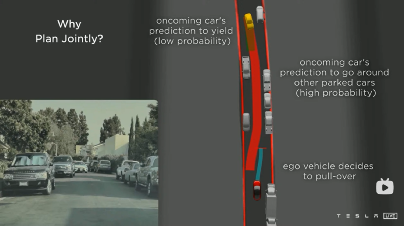
此处特斯拉举了一个窄道通行的场景,在开始时,特斯拉自动驾驶车辆认为他车会继续行走的概率较高,因此自动驾驶车辆靠右等待。然后发现社会车也停下让行,特斯拉马上在很短时间决策出继续前行。这一处理是非常棒的,目前大多数自动驾驶公司是无法处理这样的场景,很容易会出现自动驾驶车辆保守起见,停下来等待,导致社会车也无法通行,造成拥堵,或者与社会车同起同停,极有可能造成碰撞风险,但特斯拉可以很好的处理该场景,证明特斯拉的预测和决策配合非常好。
5 轨迹平滑
最后,Ashok谈到了Tesla规划算法的最后一步,轨迹平滑。从放出的图中来看,凸空间的构建是比较符合直观感受的,但由于没有任何的障碍物,不清楚在多障碍物的复杂场景下,凸空间是如何搭建的。
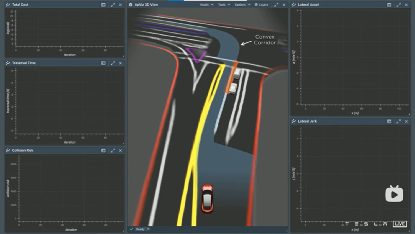
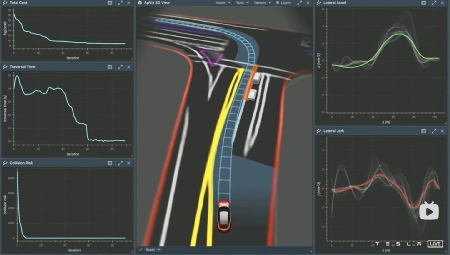
另外,Tesla也展示了在可视化界面中的轨迹优化迭代过程,通过对于评价算法的一步步迭代,最终优化收敛到碰撞系数相对低,舒适性相对高的这么一条轨迹中来,这里最重要的其实是评价算法的设定,越精准的评价算法,越能帮助规划实现更加人性化的路径构建。
5 笔者总结
看完Tesla 的AI Day演讲,我个人还是比较震惊的。从放出来的会车交互博弈视频、AI在规划方向的落地等等,让我见识到了Tesla算法的强大。当然,完全的自动驾驶远远还未达到,Tesla作为领域的先行者提供给我们这些后来人很好的思路与学习参考,在这一方面,他以领先国内的公司一大步了。也希望国内的自动驾驶企业能够稳扎稳打,避免Tesla的激进作风,最终能够实现弯道超车。
除了产品发布和人才招聘,Tesla AI Day还有很多的技术干货。本文包含规划难点分析、规划整体架构、换道方案、多车交互、轨迹平滑五方面深度解析。
作为自动驾驶领域的领军企业,Tesla的一举一动无不吸引着从业者们的目光。就在最近,一年一度的Tesla AI Day的开展更是让广大自动驾驶行业的工程师们大饱眼福。所谓外行看热闹,内行看门道。文章《特斯拉AI Day | 人工智能,会不会是车企下一个十年的标配技术?》已经对特斯拉发布的新产品有了较为深度的介绍,本篇文章想从作者的自身领域出发,带大家深入解析一下Tesla最新的决策规划相关工作。
1 目前的规划难点
作为自动驾驶整套流程中的大脑,决策规划未来可能是自动驾驶中最具有挑战性的方向之一。任何时候,如果想让人们相信自动驾驶,将自己的生命交给机器,那么其中最重要的部分就是决策规划,一个好的规划模块能够带给乘坐者们类似于人类司机的驾驶体验,并且兼顾安全与效率。
在AI DAY中,Tesla的规控模块负责人Ashok Elluswamy首先就给出了规划问题中的两大难点。第一就是很多时候,我们的规划搜索空间是非凸的,这样规划算法就会陷入局部最优。如何将实际道路上的场景构建成一个凸问题,是目前的规划瓶颈之一。第二,就是规划本身是在三维空间中进行的,这样的高维度会对算力提出很大的要求,如何利用算法来合理降维,也是一个困扰业界的难点。
这一上来指出的问题确实很犀利,也确实是作为规划从业者,目前被困扰最多的两大问题,目前学术界针对这两方面也有很多的相关工作发表。但比较可惜的是,Tesla在这次会上并没有说明他们是如何解决这两个问题的,也没有给出相应的论文。
2 规划整体架构
接下来,Ashok就简要介绍了一下目前Tesla所采用的规划架构。从中我们可以看出,整体流程还是比较常见的,规划分为两部分,首先是第一层粗略搜索,然后在凸空间内进行连续优化,从而得到平滑的轨迹。其实个人非常好奇凸空间是如何通过决策来得到的,这块应该是目前的难点。
从这张流程图以及后续演讲中出现的凸空间来看,Tesla采用的规划算法和百度Apollo的规划整体思路比较相近,都是通过数值优化的方式。这种算法的优势在于其可扩展性强,可很好地对实际道路场景进行建模,另外也可以通过学习的方法来不断对代价函数进行优化,从而提升规划的安全性和舒适性。
3 换道方案
在演讲中,Ashok给出了实际的一个规划训练换道时机的例子。据他所说他们的规划算法可以在1.5ms 搜索2500次,在仿真中生成不同换道时机的轨迹后通过对轨迹的评价,选择最优的轨迹。
此处举例如下:第一条轨迹是提前换道并且缓慢行走,那么就会给乘客带来不舒适的体验,第二条轨迹是加速并且晚换道,但是会有在前面左转路口换道无法完成,无法实现导航要求,我们需要的是一条安全、舒适、效率平衡的轨迹,因此特斯拉生成大量轨迹(如下图右上方图),然后基于代价选择出最优的一条轨迹。
这块的学习训练过程中,我们就可以看出采取优化算法的优势,通过在仿真中进行大量的采样模拟,并且搭建一个合适的评价指标,可以收敛到一个兼顾安全和效率的最优轨迹出来。
4 多车交互
Tesla还讨论了为何要将路面上的其他交通参与者也考虑进决策中来。我们的自动驾驶车辆开在道路上,肯定会遇到其他交通参与者共同行驶的情况,而这时如果决策规划中不考虑其他交通参与者的行驶意图,那么规划出的路径肯定是不安全,不平顺的。
此处特斯拉举了一个窄道通行的场景,在开始时,特斯拉自动驾驶车辆认为他车会继续行走的概率较高,因此自动驾驶车辆靠右等待。然后发现社会车也停下让行,特斯拉马上在很短时间决策出继续前行。这一处理是非常棒的,目前大多数自动驾驶公司是无法处理这样的场景,很容易会出现自动驾驶车辆保守起见,停下来等待,导致社会车也无法通行,造成拥堵,或者与社会车同起同停,极有可能造成碰撞风险,但特斯拉可以很好的处理该场景,证明特斯拉的预测和决策配合非常好。
5 轨迹平滑
最后,Ashok谈到了Tesla规划算法的最后一步,轨迹平滑。从放出的图中来看,凸空间的构建是比较符合直观感受的,但由于没有任何的障碍物,不清楚在多障碍物的复杂场景下,凸空间是如何搭建的。
另外,Tesla也展示了在可视化界面中的轨迹优化迭代过程,通过对于评价算法的一步步迭代,最终优化收敛到碰撞系数相对低,舒适性相对高的这么一条轨迹中来,这里最重要的其实是评价算法的设定,越精准的评价算法,越能帮助规划实现更加人性化的路径构建。
5 笔者总结
看完Tesla 的AI Day演讲,我个人还是比较震惊的。从放出来的会车交互博弈视频、AI在规划方向的落地等等,让我见识到了Tesla算法的强大。当然,完全的自动驾驶远远还未达到,Tesla作为领域的先行者提供给我们这些后来人很好的思路与学习参考,在这一方面,他以领先国内的公司一大步了。也希望国内的自动驾驶企业能够稳扎稳打,避免Tesla的激进作风,最终能够实现弯道超车。



编辑推荐




最新资讯
-
大卓智能端到端直播实测,16公里复杂路段挑
2025-04-25 17:16
-
《汽车轮胎耐撞击性能试验方法-车辆法》等
2025-04-25 11:45
-
“真实”而精确的能量流测试:电动汽车能效
2025-04-25 11:44
-
GRAS助力中国高校科研升级
2025-04-25 10:25
-
梅赛德斯-AMG使用VI-CarRealTime开发其控制
2025-04-25 10:21
