




 广告
广告





















































智能汽车主要传感器类型浅析
2021-09-06 12:37:11· 来源:跋山涉水

智能汽车之所以能够实现自动驾驶功能,主要依靠负责环境感知的传感器,其类似于人的视觉和听觉,如果没有环境感知传感器的支撑,将无法实现自动驾驶功能。多种传
智能汽车之所以能够实现自动驾驶功能,主要依靠负责环境感知的传感器,其类似于人的视觉和听觉,如果没有环境感知传感器的支撑,将无法实现自动驾驶功能。多种传感器融合可满足各种复杂路况,同时保证汽车软件系统冗余,具体主要依靠激光雷达 、 摄像头 、毫米波雷达的数据融合提供给计算单元进行算法处理 。
一、汽车加速智能,感知先行
在软件定义汽车过程中,自动驾驶感知层的硬件及算法是整车智能化的基础。传感器作为自动驾驶汽车的“眼睛”和“耳朵”,目前主流的自动驾驶传感器以摄像头和雷达为主,其中,雷达可分为毫米波雷达、激光雷达以及超声波雷达,摄像头则按其安装位置不同,可分为前视、侧视、后视和内置四种类型。
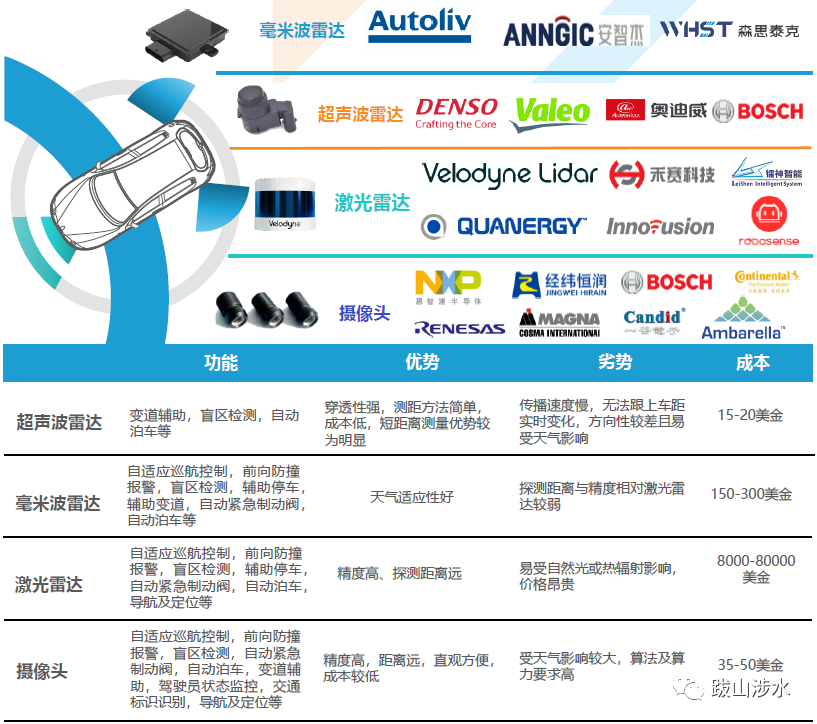
图1 自动驾驶主流传感器对比(含主要生产厂家)
在传感层的软件体系中,摄像头传感器通过视觉算法,摄像头可对车道、路边、障碍物、行人进行有效识别,不足在于识别范围受限、稳定性差。为了提升雷达性能,其软件算法也需要不断提升,例如,毫米波雷达和摄像头一样,在单独工作时都需要运行目标检测和目标跟踪,不断提高这部分算法的可靠性和准确性是难点所在,同时,单传感器提供准确的检测信号也是后续融合信号是否会更加精准的基础,因此对于毫米波雷达和摄像头的数据处理算法开发,是需要大量的思考、设计、仿真和测试验证来持续改进。
二、视觉主导方案VS 激光雷达主导方案
目前自动驾驶传感器的选择存在两种不同的路径:一种以摄像头主导,搭配毫米波雷达,使用先进的计算机视觉算法实现全自动驾驶,典型代表有特斯拉、 Moblieye 以及百度 Apollo Lite ;另一种则以激光雷达为主同时搭载毫米波雷达、超声波传感器和摄像头,远距离全方位探测能力强,但成本相对较高,典型代表为谷歌 Waymo 、百度 Apollo 、文远知行等主流无人驾驶企业。

图2、视觉主导方案VS 激光雷达主导方案
当前,两种路径各有利弊,依旧存在分歧:
视觉主导方案:摄像头获取的视频数据与人眼感知的真实世界最为相似,接近人类驾驶的形态。而且,在当前激光雷达价格居高不下的情况下,仅使用摄像头更容易控制成本;
激光雷达主导方案:“雷达 视觉”方案的优势是监测的距离更长、精度更高、响应更快,且不受环境影响。其对三维信息的处理,例如物体大小、移动速度的计算都有着非常优异的表现。
目前两种路径尚未分出胜负,随着自动驾驶技术的发展,激光雷达的价格正在加速下降,其全方位探测能力和不易受环境影响的优势将逐渐显现出来,有望成为未来自动驾驶汽车主流的配置。
一、汽车加速智能,感知先行
在软件定义汽车过程中,自动驾驶感知层的硬件及算法是整车智能化的基础。传感器作为自动驾驶汽车的“眼睛”和“耳朵”,目前主流的自动驾驶传感器以摄像头和雷达为主,其中,雷达可分为毫米波雷达、激光雷达以及超声波雷达,摄像头则按其安装位置不同,可分为前视、侧视、后视和内置四种类型。
图1 自动驾驶主流传感器对比(含主要生产厂家)
在传感层的软件体系中,摄像头传感器通过视觉算法,摄像头可对车道、路边、障碍物、行人进行有效识别,不足在于识别范围受限、稳定性差。为了提升雷达性能,其软件算法也需要不断提升,例如,毫米波雷达和摄像头一样,在单独工作时都需要运行目标检测和目标跟踪,不断提高这部分算法的可靠性和准确性是难点所在,同时,单传感器提供准确的检测信号也是后续融合信号是否会更加精准的基础,因此对于毫米波雷达和摄像头的数据处理算法开发,是需要大量的思考、设计、仿真和测试验证来持续改进。
二、视觉主导方案VS 激光雷达主导方案
目前自动驾驶传感器的选择存在两种不同的路径:一种以摄像头主导,搭配毫米波雷达,使用先进的计算机视觉算法实现全自动驾驶,典型代表有特斯拉、 Moblieye 以及百度 Apollo Lite ;另一种则以激光雷达为主同时搭载毫米波雷达、超声波传感器和摄像头,远距离全方位探测能力强,但成本相对较高,典型代表为谷歌 Waymo 、百度 Apollo 、文远知行等主流无人驾驶企业。
图2、视觉主导方案VS 激光雷达主导方案
当前,两种路径各有利弊,依旧存在分歧:
视觉主导方案:摄像头获取的视频数据与人眼感知的真实世界最为相似,接近人类驾驶的形态。而且,在当前激光雷达价格居高不下的情况下,仅使用摄像头更容易控制成本;
激光雷达主导方案:“雷达 视觉”方案的优势是监测的距离更长、精度更高、响应更快,且不受环境影响。其对三维信息的处理,例如物体大小、移动速度的计算都有着非常优异的表现。
目前两种路径尚未分出胜负,随着自动驾驶技术的发展,激光雷达的价格正在加速下降,其全方位探测能力和不易受环境影响的优势将逐渐显现出来,有望成为未来自动驾驶汽车主流的配置。



编辑推荐




最新资讯
-
全国汽车标准化技术委员会汽车节能分技术委
2025-04-18 17:34
-
我国联合牵头由DC/DC变换器供电的低压电气
2025-04-18 17:33
-
中国汽研牵头的首个ITU-T国际标准正式立项
2025-04-18 17:32
-
为什么要进行汽车以太网接收测试?汽车以太
2025-04-18 17:26
-
产品手册下载 | NI 全新USB数据采集-NI mio
2025-04-18 16:39
