




 广告
广告





















































泊车速度比资深司机还快一倍?! 使用基于模型的设计开发自动泊车技术
2021-09-09 13:06:04· 来源:MATLAB 作者:Eren Aydemir 和 Ersun Sozen,福特奥托桑

福特奥托桑开发的自动泊车系统原型可简化泊车操作,泊车速度比资深司机还快了一倍。即使对于拥有多年驾龄的司机而言,牵引挂车泊车也并非易事。引导挂车进入装货
福特奥托桑开发的自动泊车系统原型可简化泊车操作,泊车速度比资深司机还快了一倍。
即使对于拥有多年驾龄的司机而言,牵引挂车泊车也并非易事。引导挂车进入装货码头通常需要好几步操作。如果是在拥挤狭窄、人来人往的城市街道上穿行,泊车更是难上加难(图 1)。
 图 1.牵引挂车在测试轨道上行驶,上下两张图分别代表装货码头场景和城市环境。
图 1.牵引挂车在测试轨道上行驶,上下两张图分别代表装货码头场景和城市环境。
为了帮助牵引挂车司机泊车,在福特奥托桑,我们的团队开发了一个自动泊车系统的概念验证原型。
该模型运用了两个轨迹规划算法:一个是在欧盟 TrustVehicle 计划框架内与英国萨里大学合作开发的人工势场算法;另一个是由我们的内部团队开发的 RRT* 算法,RRT* 是快速搜索随机树 (RRT) 的变体。
在 Simulink® 中对这些算法进行建模和仿真后,我们通过硬件在环 (HIL) 测试对其进行了验证。然后,我们使用真实牵引车进行了测试。
测试显示,该原型简化了泊车操作,泊车速度比资深司机还快了一倍。
牵引挂车和轨迹算法建模
我们的团队有着为乘用车和机器人开发自动驾驶系统和机器人控制系统的经验,但从未涉及牵引挂车这类大型车。另外,牵引车和挂车是铰接在一起的,这使得控制系统设计更加复杂。
借助基于模型的设计,我们得以对牵引车的动力学特性进行建模和可视化,并在开发和完善轨迹规划和控制算法时考虑这些动力学特性(图 2)。
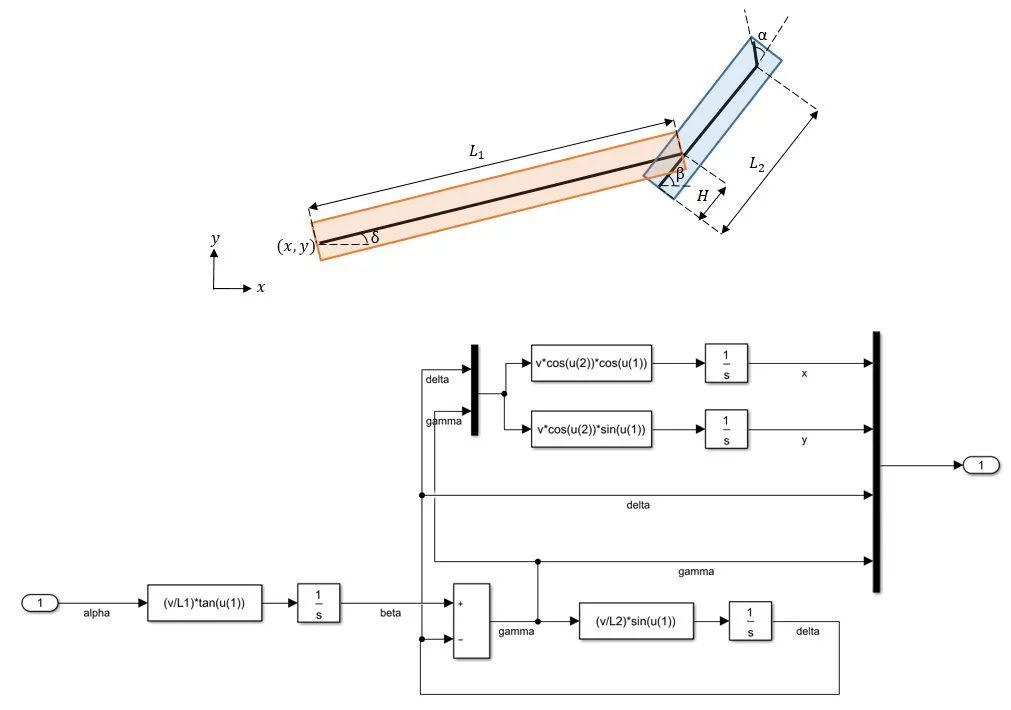
图 2.铰接式牵引挂车动力学示意图。
我们基于 3DOF 自行车模型创建了一个简化的车辆模型,用于表示纵向、横向和横摆运动。然后,我们使用牵引车轮胎质量等参数测量值对此模型进行配置。
我们将控制系统的设计分成多个 Simulink 组件,由不同的开发团队分工完成。
比如说,有一个团队负责轨迹规划组件,实现 RRT* 算法或者人工势场算法。另有一个团队负责轨迹控制组件,比如计算适当的转向角、制动扭矩和加速扭矩,以产生轨迹规划组件所提供的预期横摆角速度、减速度和加速度。
该团队最初将轨迹控制组件纯粹作为追踪控制器加以实现,但后来将其作为模型预测控制器重新实现,以适应更高的速度。
有一个组件实现了与感知子系统的接口,该子系统使用激光雷达和雷达来定位车辆附近的障碍物和构造。另有一些组件实现了针对以下各项的接口:在 Android™ 平板电脑上运行的监控 App、牵引车的 CAN 总线,以及我们的软件在环 (SIL) 和 HIL 测试环境(图 3)。
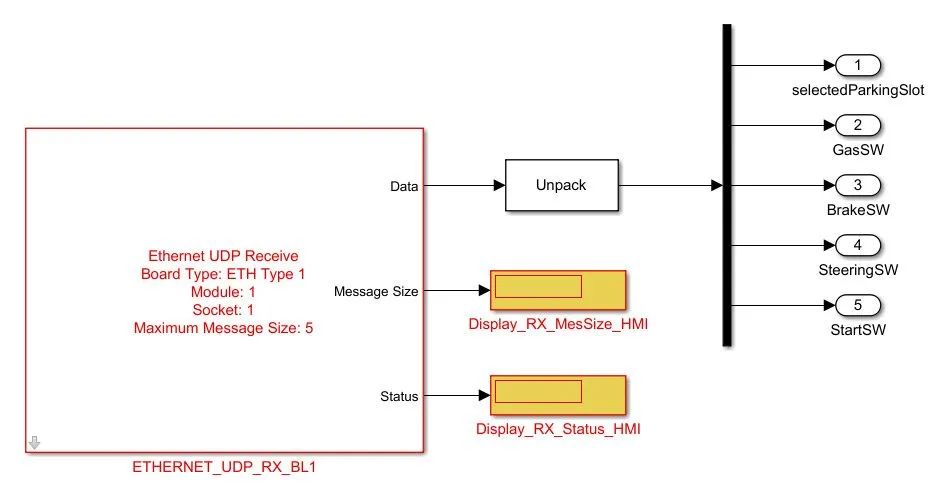
图 3.HMI 应用的 UDP 接口的 Simulink 模型。
SIL、HIL 和车载测试
在 Simulink 中进行初始验证仿真后,我们又在 SIL 和 HIL 环境中进行了更广泛的测试。
我们使用 Simulink Coder™ 从轨迹规划和轨迹控制模型生成代码,并运行了 SIL 测试,测试使用模拟的传感器输入、牵引挂车的动态模型以及环境模型。
在 HIL 测试中,我们将轨迹规划和控制算法部署到 dSPACE® 目标硬件。借助 HIL 测试,我们在真车实测之前率先验证了设计的实时性能,例如通过 CAN 和 UDP 进行的实时通信。
车载试验是在位于土耳其埃斯基谢希尔的福特奥托桑 Inönü 测试轨道上进行的。我们在牵引车上安装了 dSPACE 系统,用于运行从 Simulink 模型生成的代码(图 4)。
在最初的几次测试中,我们发现牵引车物理模型中某些参数的值不准确,比如侧偏刚度。

图 4.安装在车内的系统测试装置。
我们用更准确的测量更新了这些值,并重新调整了控制器,使得仿真结果和测量结果高度吻合,系统的总体性能得到了大幅改进(图 5)。
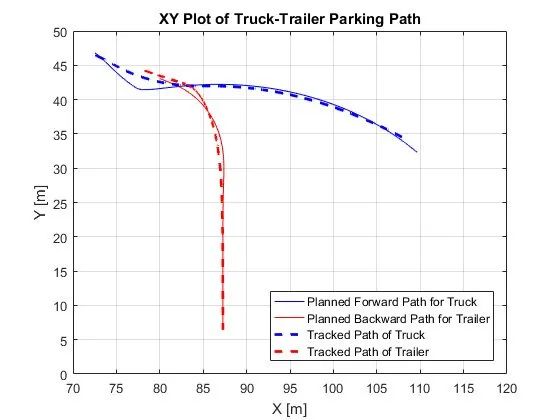 图 5.位置、横摆角速度、横向加速度的仿真结果和测量结果。
图 5.位置、横摆角速度、横向加速度的仿真结果和测量结果。
对于某些情形,我们预想会需要至少两三步操作,但牵引车事实上只用了一步就完成了泊车。
尽管仿真已经向我们展示了这一可能性,但亲眼所见仍使我们欣喜不已:在算法的引导下,牵引车泊车的效率胜于有着 15 至 20 年驾龄的司机。
今后的集成计划
我们开发了高效的轨迹规划和控制算法,并在真车上进行算法验证,从而实现了这个项目的所有目标和关键性能指标。
现在,我们已具备自动驾驶模式下铰接式车辆泊车的自主技术。福特奥托桑同时还在开展另外几项开发计划,并且都要利用这一泊车功能,其中一项侧重于停车场管理,另一项则关注牵引车远程控制。
我们期待将这一自动泊车系统集成到上述更大的生产系统中。
即使对于拥有多年驾龄的司机而言,牵引挂车泊车也并非易事。引导挂车进入装货码头通常需要好几步操作。如果是在拥挤狭窄、人来人往的城市街道上穿行,泊车更是难上加难(图 1)。
图 1.牵引挂车在测试轨道上行驶,上下两张图分别代表装货码头场景和城市环境。为了帮助牵引挂车司机泊车,在福特奥托桑,我们的团队开发了一个自动泊车系统的概念验证原型。
该模型运用了两个轨迹规划算法:一个是在欧盟 TrustVehicle 计划框架内与英国萨里大学合作开发的人工势场算法;另一个是由我们的内部团队开发的 RRT* 算法,RRT* 是快速搜索随机树 (RRT) 的变体。
在 Simulink® 中对这些算法进行建模和仿真后,我们通过硬件在环 (HIL) 测试对其进行了验证。然后,我们使用真实牵引车进行了测试。
测试显示,该原型简化了泊车操作,泊车速度比资深司机还快了一倍。
牵引挂车和轨迹算法建模
我们的团队有着为乘用车和机器人开发自动驾驶系统和机器人控制系统的经验,但从未涉及牵引挂车这类大型车。另外,牵引车和挂车是铰接在一起的,这使得控制系统设计更加复杂。
借助基于模型的设计,我们得以对牵引车的动力学特性进行建模和可视化,并在开发和完善轨迹规划和控制算法时考虑这些动力学特性(图 2)。
图 2.铰接式牵引挂车动力学示意图。
我们基于 3DOF 自行车模型创建了一个简化的车辆模型,用于表示纵向、横向和横摆运动。然后,我们使用牵引车轮胎质量等参数测量值对此模型进行配置。
我们将控制系统的设计分成多个 Simulink 组件,由不同的开发团队分工完成。
比如说,有一个团队负责轨迹规划组件,实现 RRT* 算法或者人工势场算法。另有一个团队负责轨迹控制组件,比如计算适当的转向角、制动扭矩和加速扭矩,以产生轨迹规划组件所提供的预期横摆角速度、减速度和加速度。
该团队最初将轨迹控制组件纯粹作为追踪控制器加以实现,但后来将其作为模型预测控制器重新实现,以适应更高的速度。
有一个组件实现了与感知子系统的接口,该子系统使用激光雷达和雷达来定位车辆附近的障碍物和构造。另有一些组件实现了针对以下各项的接口:在 Android™ 平板电脑上运行的监控 App、牵引车的 CAN 总线,以及我们的软件在环 (SIL) 和 HIL 测试环境(图 3)。
图 3.HMI 应用的 UDP 接口的 Simulink 模型。
SIL、HIL 和车载测试
在 Simulink 中进行初始验证仿真后,我们又在 SIL 和 HIL 环境中进行了更广泛的测试。
我们使用 Simulink Coder™ 从轨迹规划和轨迹控制模型生成代码,并运行了 SIL 测试,测试使用模拟的传感器输入、牵引挂车的动态模型以及环境模型。
在 HIL 测试中,我们将轨迹规划和控制算法部署到 dSPACE® 目标硬件。借助 HIL 测试,我们在真车实测之前率先验证了设计的实时性能,例如通过 CAN 和 UDP 进行的实时通信。
车载试验是在位于土耳其埃斯基谢希尔的福特奥托桑 Inönü 测试轨道上进行的。我们在牵引车上安装了 dSPACE 系统,用于运行从 Simulink 模型生成的代码(图 4)。
在最初的几次测试中,我们发现牵引车物理模型中某些参数的值不准确,比如侧偏刚度。
图 4.安装在车内的系统测试装置。
我们用更准确的测量更新了这些值,并重新调整了控制器,使得仿真结果和测量结果高度吻合,系统的总体性能得到了大幅改进(图 5)。
图 5.位置、横摆角速度、横向加速度的仿真结果和测量结果。对于某些情形,我们预想会需要至少两三步操作,但牵引车事实上只用了一步就完成了泊车。
尽管仿真已经向我们展示了这一可能性,但亲眼所见仍使我们欣喜不已:在算法的引导下,牵引车泊车的效率胜于有着 15 至 20 年驾龄的司机。
今后的集成计划
我们开发了高效的轨迹规划和控制算法,并在真车上进行算法验证,从而实现了这个项目的所有目标和关键性能指标。
现在,我们已具备自动驾驶模式下铰接式车辆泊车的自主技术。福特奥托桑同时还在开展另外几项开发计划,并且都要利用这一泊车功能,其中一项侧重于停车场管理,另一项则关注牵引车远程控制。
我们期待将这一自动泊车系统集成到上述更大的生产系统中。



编辑推荐




最新资讯
-
大卓智能端到端直播实测,16公里复杂路段挑
2025-04-25 17:16
-
《汽车轮胎耐撞击性能试验方法-车辆法》等
2025-04-25 11:45
-
“真实”而精确的能量流测试:电动汽车能效
2025-04-25 11:44
-
GRAS助力中国高校科研升级
2025-04-25 10:25
-
梅赛德斯-AMG使用VI-CarRealTime开发其控制
2025-04-25 10:21
