




 广告
广告





















































基于线性变参数系统的四轮转向自主地面车辆路径跟踪控制及实验验证
2021-09-12 10:45:58· 来源:同济智能汽车研究所

其中,轮胎侧偏角定义为
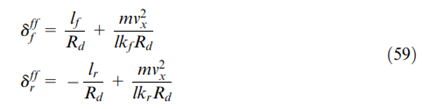
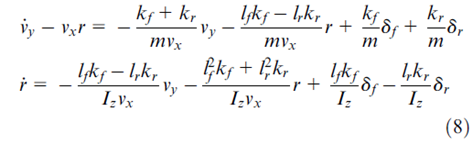
将等式(6)和(7)代入(4)和(5)中,得到以下线性动力学模型:
B.路径跟踪模型
为了设计路径跟踪控制器,基于图2中的单轨模型,建立了四轮转向AGV的路径跟踪模型,如图3所示。除了车体坐标系xy,xdyd坐标系表示车辆在其目标路径上的方向,XY坐标系是大地坐标系。四轮转向AGV的路径跟踪问题可以描述为最小化偏航角误差 和横向位置误差
和横向位置误差 。
。
和横向位置误差。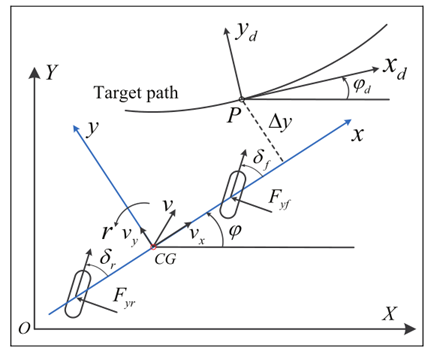
图3 四轮转向AGV路径跟踪模型
偏航角误差可以表示为
可以表示为
其中 是目标偏航角,它的导数可以写成
是目标偏航角,它的导数可以写成
是目标偏航角,它的导数可以写成其中Rd是目标路径的曲率半径。
在等式(9)的两边取一个关于时间的导数,得到

横向位置误差定义为从目标路径点P到x轴的垂直距离,其二阶导数可写成
定义为从目标路径点P到x轴的垂直距离,其二阶导数可写成
其中ayd是目标横向加速度,可以表示为

此外,等式(12)可以重写为
由于纵向速度假定为常数,在积分方程(14)后,得出



编辑推荐




最新资讯
-
大卓智能端到端直播实测,16公里复杂路段挑
2025-04-25 17:16
-
《汽车轮胎耐撞击性能试验方法-车辆法》等
2025-04-25 11:45
-
“真实”而精确的能量流测试:电动汽车能效
2025-04-25 11:44
-
GRAS助力中国高校科研升级
2025-04-25 10:25
-
梅赛德斯-AMG使用VI-CarRealTime开发其控制
2025-04-25 10:21
