




 广告
广告





















































基于线性变参数系统的四轮转向自主地面车辆路径跟踪控制及实验验证
2021-09-12 10:45:58· 来源:同济智能汽车研究所

基于上述方程,可以导出以下路径跟踪模型
此外,路径跟踪模型可以用状态空间的形式重写

其中状态向量

,控制向量

,外部输入向量

,系数矩阵由下式给出

C.LPV系统模型
在路径跟踪模型中,纵向速度vx被视为恒定值,以获得用于路径跟踪控制器设计的线性模型。然而,vx不能保持不变,它必须是时变的。因此,所设计的控制器必须能适应vx的变化。此外,在路径跟踪模型中,轮胎侧偏刚度也被视为恒定值。众所周知,轮胎侧偏刚度主要受路面摩擦系数的影响。因此,所设计的控制器应具有抑制参数摄动的鲁棒性。为此,采用LPV系统使控制器获得优越的路径跟踪性能和鲁棒性。
在LPV系统模型中,轮胎侧偏刚度可视为一个可变参数,并可写成
其中kf0和kr0是前后轮胎的标称轮胎侧偏刚度,μ是路面摩擦系数。
根据方程(17)的结构,选择三个辅助时变参数为 ,
, 和
和 。变参数向量定义为
。变参数向量定义为
,和。变参数向量定义为
之后,控制器设计的LPV系统可以表示为

其中
矩阵 的仿射模型可以写成
的仿射模型可以写成
的仿射模型可以写成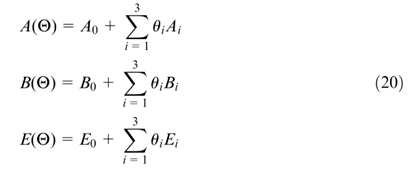
其中
考虑到(i=1,2,3),因此,变参数向量 有八种组合形式
有八种组合形式
(i=1,2,3),因此,变参数向量有八种组合形式
对于不同的参数变化向量 (j=1,2,…8),等式(20)可以改写为
(j=1,2,…8),等式(20)可以改写为
(j=1,2,…8),等式(20)可以改写为其中k表示最小值或最大值。可以发现,等式(21)是等式(20)对不同变参数向量的扩展。
此外,具有八个顶点的路径跟踪控制模型的LPV模型可以表示为
其中 是八个顶点的权重。此外
是八个顶点的权重。此外
是八个顶点的权重。此外
为了简化,八个顶点的权重如下
其中

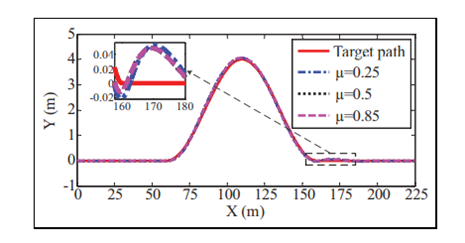
在LPV模型中,μ=0.25,μ=1,vx=0,vx=20。



编辑推荐




最新资讯
-
中汽中心工程院能量流测试设备上线全新专家
2025-04-03 08:46
-
上新|AutoHawk Extreme 横空出世-新一代实
2025-04-03 08:42
-
「智能座椅」东风日产N7为何敢称“百万级大
2025-04-03 08:31
-
基于加速度计补偿的俯仰角和路面坡度角估计
2025-04-03 08:30
-
《北京市自动驾驶汽车条例》正式实施 L3级
2025-04-02 20:23
