




 广告
广告





















































基于线性变参数系统的四轮转向自主地面车辆路径跟踪控制及实验验证
2021-09-12 10:45:58· 来源:同济智能汽车研究所

根据哈密顿函数,控制方程可以推导为

此外,控制向量U可以在变换后计算出来

另外,欧拉方程可以推导为

拉格朗日乘子向量 定义为
定义为
定义为
在对时间求导数后,得出
由于 在稳态下可以视为零,所以P(t)是以下黎卡提方程的解
在稳态下可以视为零,所以P(t)是以下黎卡提方程的解
在稳态下可以视为零,所以P(t)是以下黎卡提方程的解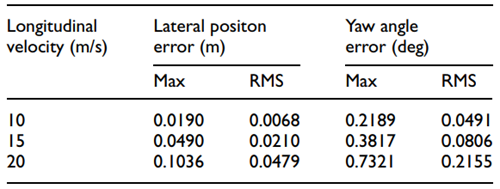
在计算出P(t)之后,将等式(31)代入等式(29)得出

在LQR控制器设计中,Q和R分别给定为Q=diag[1000,10,300,3],R=diag[1,2]。
B.闭环系统的稳定性分析
至于LQR反馈控制器方程(34),它不能处理外部干扰。这个问题将在第4.3节中解决。首先,用LQR控制器对闭环系统进行稳定性分析。如果外部干扰暂时被忽略,那么
将等式(34)代入等式(35)得到闭环系统

为了分析闭环系统方程(36)的稳定性,我们首先引入以下引理。
引理1:如果线性时不变系统方程(35)中存在扰动D(t),即

,其中D(t)独立于控制向量U,则扰动D(t)不会改变系统方程(35)的可控性。
由于本文中的扰动是由独立于控制向量U的 和
和 组成的,因此可以得出结论,扰动不会改变系统方程(35)的可控性。
组成的,因此可以得出结论,扰动不会改变系统方程(35)的可控性。
和组成的,因此可以得出结论,扰动不会改变系统方程(35)的可控性。此外,对于稳定性分析,提出了以下引理。
引理2: 对于线性时不变系统方程(35),它具有用于状态反馈LQR控制器设计的性能指标方程(26)。如果{A,B}是可控的,且{A,F}是可观测的,其中FF=Q,则闭环系统方程(36)是渐近稳定的。XcPXc是一个李雅普诺夫函数,其中P是一个对称正定矩阵,它是黎卡提方程(33)的唯一解。
定义线性二次函数

其中,当且仅当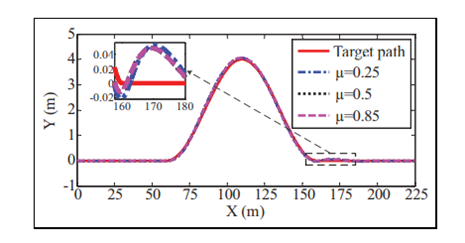 。由于
。由于
 。因此,等式(37)是一个李雅普诺夫函数。很显然满足下式:
。因此,等式(37)是一个李雅普诺夫函数。很显然满足下式:
。由于。因此,等式(37)是一个李雅普诺夫函数。很显然满足下式:
在对时间求导后的等式如下:

将方程(33)和(36)代入方程(39)得出:
由于Q是一个半正定矩阵,而R是一个正定矩阵, 。因此
。因此
。因此如果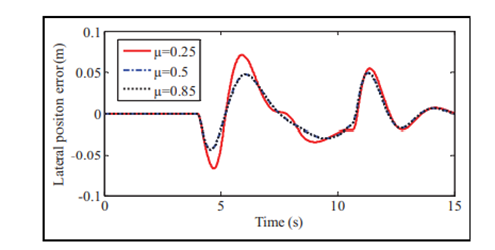 。根据方程(40),可以得到:
。根据方程(40),可以得到:
。根据方程(40),可以得到:由于 ,等式(44)可以写为:
,等式(44)可以写为:
,等式(44)可以写为:由于,可以推导出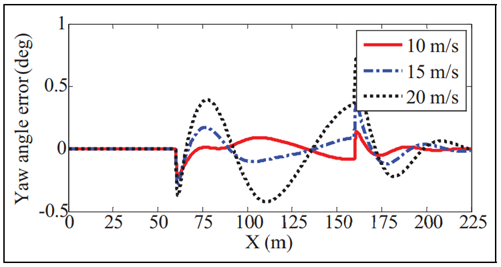 。因此,该系统方程的零输入响应可以表示为:
。因此,该系统方程的零输入响应可以表示为:
,可以推导出。因此,该系统方程的零输入响应可以表示为:
将等式(45)带入等式(42)得到:
等式(46)表明:
它和 是可观察的条件是相矛盾的。因此,假设
是可观察的条件是相矛盾的。因此,假设 是错误的。
是错误的。
是可观察的条件是相矛盾的。因此,假设是错误的。最后,可以得出结论,闭环系统方程(36)可以看作是全局渐近稳定的。这证明了引理2。
C.LQR控制器与前馈控制相结合
从方程(34)可以看出,控制向量U仅与状态向量Xc相关。它不能处理外部干扰 。是可以得到的,并由
。是可以得到的,并由 和
和 组成。因此,采用前馈控制来减小外部干扰引起的路径跟踪误差。
组成。因此,采用前馈控制来减小外部干扰引起的路径跟踪误差。
。是可以得到的,并由和组成。因此,采用前馈控制来减小外部干扰引起的路径跟踪误差。根据上述分析,路径跟踪控制器可以表示为前馈控制器和LQR反馈控制器的和。

其中,

需要求解,并根据方程(34),LQR反馈控制器可以表示为:

将方程(49)带入方程(14)得到:
假设状态向量的初始值为零,经拉普拉斯变换后,式(50)可得改变成:

其中 表示对变量向量进行拉普拉斯变换。
表示对变量向量进行拉普拉斯变换。
表示对变量向量进行拉普拉斯变换。如上所述,假设是常数。可以得到:
是常数。可以得到:
然后:

假设前馈控制器是恒定的稳态,可以得到:
将方程(53)和(54)代入方程(51)得到:
根据拉普拉斯变换的终值定理,系统状态的稳态误差可以表示为:
如果 ,可以得到:
,可以得到:
,可以得到:此外,还有:
最终,前馈控制器可以算出并表示为:
为了简化轨迹跟踪控制器的设计过程,在控制器设计和稳定性分析中使用了模型方程(17)。事实上LPV模型用于最终控制器设计。考虑到以下由方程(22)描述的LPV闭环控制系统具有八个顶点,LPV-LQR控制器应该表示为八个惯性控制器的加权和。等式如下:

其中, 是第j个顶点模型的第j个控制器,可根据等式(49)和(59)计算得出。
是第j个顶点模型的第j个控制器,可根据等式(49)和(59)计算得出。
是第j个顶点模型的第j个控制器,可根据等式(49)和(59)计算得出。5 仿真分析
为了评估所设计控制器的路径跟踪性能,通过CarSim-Simulink平台使用高度准确的整车模型进行联合仿真。4WS AGV路径跟踪仿真框图如图5所示。仿真中4WS AGV的结构参数如表1所示。在车辆测试,双车道变换(DLC)是最常见和最典型的动作之一。它可以很好地评估车辆的横向动力性能。对于自动驾驶汽车,DLC 机动也是一个至关重要的动作。该测试不仅可以验证控制器的路径跟踪性能,还可以评估车辆的操纵稳定性。因此,选择DLC作为条件。
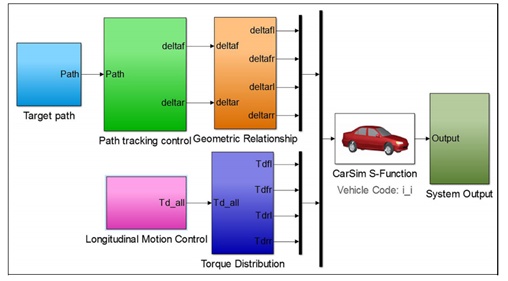
图5 4WS AGV仿真框图
A.不同的路面摩擦系数
在本仿真案例中,4WS AGV以不同的路面摩擦系数进行DLC机动,旨在验证所设计控制器的路径跟踪能力。此外,它还可以评估该路径跟踪控制器对不同路况的鲁棒性。4WS AGV的纵向速度设定为15m/s,道路摩擦系数设定为0.25,0.5和0.85来模拟不同路面条件,即结冰路面、湿路面和干路面。
图6 不同摩擦系数路面下的路径跟踪结果
表2 不同摩擦系数路面下的路径跟踪误差
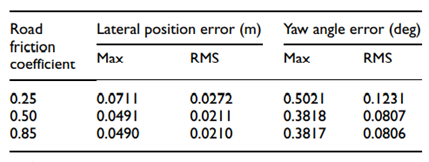
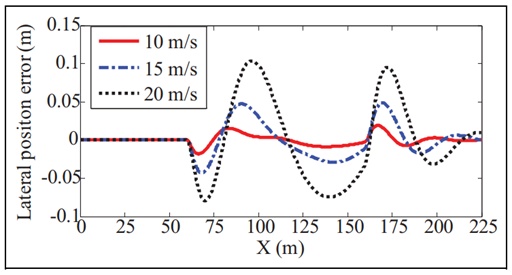
图7 不同摩擦系数路面下的横向位置误差
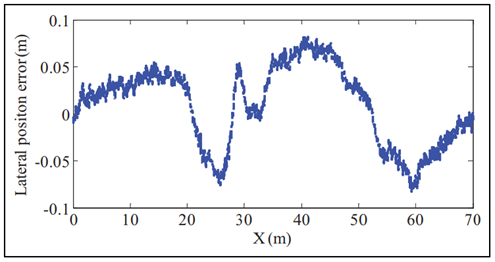
图8 不同摩擦系数路面下的偏航角误差



编辑推荐




最新资讯
-
推荐性国家标准《乘/商用车电子机械制动卡
2025-04-30 11:13
-
载荷分解
2025-04-30 10:46
-
布雷博在上海开设亚洲首个灵感实验室
2025-04-30 10:25
-
组分性能对锂离子电池卷芯挤压力学响应的影
2025-04-30 09:00
-
美国发布自动驾驶新框架,放宽报告要求+扩
2025-04-30 08:59
