




 广告
广告





















































基于线性变参数系统的四轮转向自主地面车辆路径跟踪控制及实验验证
2021-09-12 10:45:58· 来源:同济智能汽车研究所

不同摩擦系数路面的路径跟踪结果如图6所示。可以发现,即使在冰面上,路径跟踪误差也很小。详细分析了跟踪误差。横向位置误差和偏航角误差如图7和图8所示。此外,表2中列出了最大值和均方值(RMS)。可以看出,结冰道路上横向位置误差的最大值和RMS值为0.0711m和0.0272m。偏航角误差值的最大值和RMS为0.5021和0.1231。这表明,所设计的控制器具有良好的路径跟踪和抗参数扰动的鲁棒稳定性。
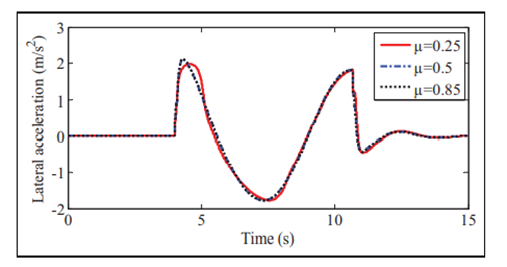
图9 不同摩擦系数路面下的横向加速度误差

图10 不同摩擦系数路面下的前轮转向角误差
图9为4WS AGV的横向加速度。在湿路面和干路面上,最大横向加速度不是很大。但在结冰路面条件下,横向加速度非常大。前轮和后轮的转向角分别如图10和图11所示。可以发现,控制器必须提供更大的转向角,以在低路面摩擦系数条件下保持鲁棒稳定性和路径跟踪能力。
B.不同的纵向速度
由于路径跟踪控制器是基于单轨模型设计的,其中假设纵向速度恒定。因此,有必要对不同纵向速度条件下4WS AGV的跟踪性能进行评估。道路摩擦系数设置为0.85,4WS AGV的纵向速度分别设置为10 m/s、15 m/s和20 m/s。
三种不同纵向速度条件下的路径跟踪结果如图12所示。可以看出,所设计的控制器能够以较小的误差跟踪目标路径,且稳态跟踪误差接近于零。横向位置误差和偏航角误差分别如图13和图14所示。误差分析结果如表3所示,从中我们可以发现,无论是横向位置误差还是偏航角误差,跟踪误差都随着纵向速度的增加而增加。由此可得,高速下的路径跟踪问题具有更大的挑战性。
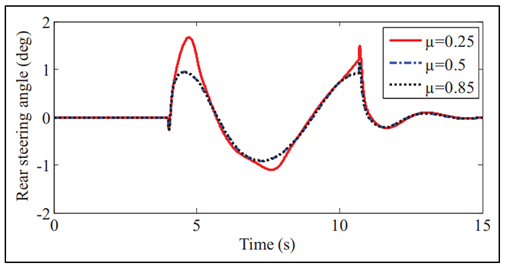
图11 不同附着系数路面下的后轮转向角
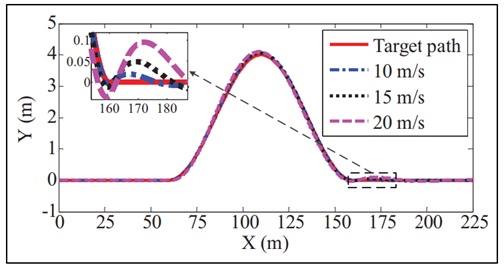
图12 不同纵向速度下的路径跟踪结果
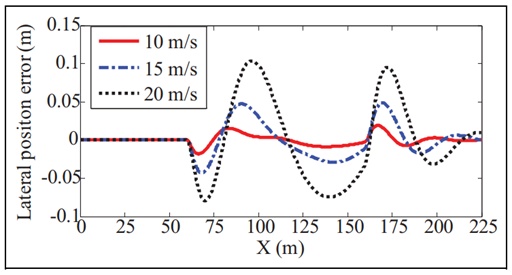
图13 不同纵向速度下的侧向位移误差
表3 不同纵向速度下的路径跟踪误差
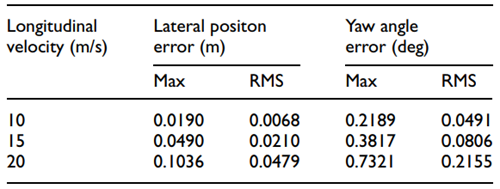
RMS: 均方根值
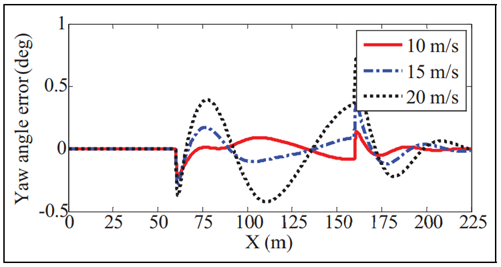
图14 不同纵向速度下的横摆角误差
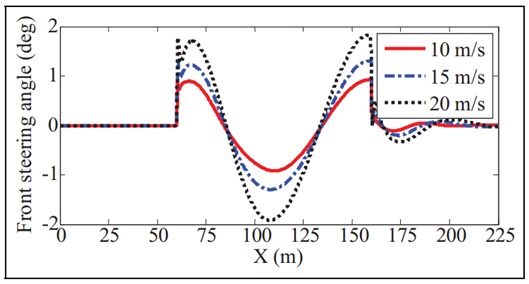
图15 不同纵向速度下的侧向加速度
在纵向速度小于20m/s时,这个4WS AGV的最大横向位置误差可以限制在0.1m内,最大横摆角误差不超过0.8°。
从误差分析可以总结出,该路径跟踪控制器可以有效跟踪目标路径,并且在面对系统不确定因素时有良好的鲁棒性。
图15显示了三种不同纵向速度条件下的侧向加速度。可以发现,最大的横向加速度可以达到接近4m/s。前轮和后轮的转向角分别如图16和图17所示。前轮和后轮的转向角都随着纵向速度的增加而增加,这意味着该4WS AGV需要更大的侧向力来保持系统的稳定性和提高路径跟踪性能。
6 实验验证
为了进一步验证路径跟踪控制器的性能,我们用DLC机动装置进行了一次实车实验。在测试条件下,驱动电机的最大转速和最大扭矩为800rpm和180N·m。转向电机的最大转向角为30°。考虑到SBW系统的可靠性较差以及驾驶的安全性,车辆的纵向速度被限制在3m/s内。测试道路如图18所示。
图16 不同纵向速度下的前轮转向角
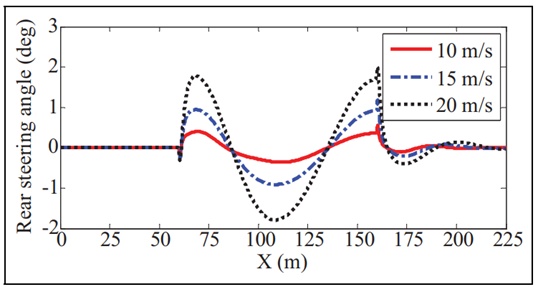
图17 不同纵向速度下的后轮转向角

图18 测试道路
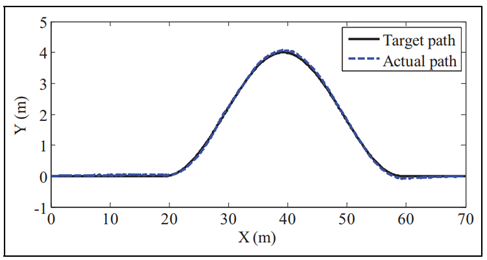
图19 实车验证下的路径跟踪结果
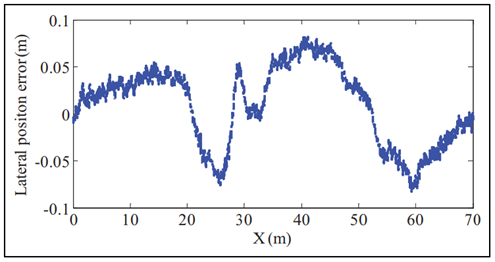
图20 实车验证下的侧向位置误差
图21 实车验证下的横摆角误差
实车实验的路径跟踪结果如图19所示。可以发现,设计的控制器在实车实验条件下可以很好地跟踪目标路径。此外,图20和图21显示了侧向位置误差和横摆角误差。侧向位置误差最大为0.08m,组合定位系统的定位精度为0.05m,所以这个误差非常小。横摆角误差最大为3.5°,组合定位系统的偏航角精度为2°,所以横摆角误差也非常小。
从误差分析中,我们可以得出这样的结论:本文所设计的控制器在道路测试中显示出良好的路径跟踪性能。图22和23分别显示了横向加速度测试结果和四个车轮转向角的变化情况。
7 总结
本文设计了一个用于四轮独立转向无人小车的路径跟踪控制器,主要目的在于减小车辆的侧向位置误差和横摆角误差。为了简化控制器的设计,使用一个单轨模型来建立路径跟踪模型。将LPV系统模型应用于控制器设计,使路径跟踪控制器对纵向速度和道路摩擦系数等参数扰动获得良好的鲁棒性。路径跟踪控制器是在LQR和前馈控制的基础上设计的,前馈控制被用来消除干扰引起的误差。为了评估所设计的路径跟踪控制器的性能,进行了仿真和实车试验。仿真和实验结果表明,本文所设计的控制器不仅表现出良好的路径跟踪性能,而且还具有很强的鲁棒性,可以处理参数不确定性问题。
利益冲突声明
作者声明与本文的研究、作者身份和/或发表没有潜在的利益冲突。
经费声明
本文的研究、撰写和/或发表接受了以下财务支持。这项工作得到了中国国家重点研发计划(批准号:2018YFB0104802)、中国国家自然科学基金(批准号:U1564207)和上海汽车工业科技发展基金会项目(批准号:1734)的部分支持。
ORCID ID (科研人员与投稿身份识别码):

参考文献


END
联系人:张老师
电话:15221659529
邮箱:20666080@tongji.edu.cn







