




 广告
广告





















































基于线性变参数系统的四轮转向自主地面车辆路径跟踪控制及实验验证
2021-09-12 10:45:58· 来源:同济智能汽车研究所

编者按:近年来,随着汽车智能化技术的飞速发展,轨迹跟踪控制作为智能车辆的重点研究问题,成为国内外学者广泛关注的热点。四轮转向车辆可控自由度高,能有效改
编者按:近年来,随着汽车智能化技术的飞速发展,轨迹跟踪控制作为智能车辆的重点研究问题,成为国内外学者广泛关注的热点。四轮转向车辆可控自由度高,能有效改善车辆行驶的操纵性、稳定性及安全性,是汽车未来发展的重要方向之一。目前大多数的轨迹跟踪控制的研究集中于前轮转向的车辆上,而对四轮转向车辆的轨迹跟踪控制的关注较少。这篇文章提出了一种基于四轮转向自主地面车辆的路径跟踪控制方法,具有前瞻性的研究意义。
本文译自:《Path tracking control of 4-wheel-steering autonomous ground vehicles based on linear parameter-varying system with experimental verification》
文章来源:Proceedings of the Institution of Mechanical Engineers. Part I: Journal of Systems and Control Engineering, 2020.
作者:Peng Hang, Xinbo Chen
原文链接:http://sage.cnpereading.com/paragraph/article/?doi=10.1177/0959651820934572
摘要:在本研究中,提出了一种新型四轮转向电动汽车作为自主地面车辆。本文的目的是研究四轮转向自主地面车辆智能驾驶的路径跟踪控制算法。在单轨模型的基础上,建立了用于轨迹跟踪控制器设计的轨迹跟踪模型。接着建立了线性变参数系统模型,使路径跟踪控制器能够适应不同的纵向速度和路面摩擦系数。再者,设计了一种用于路径跟踪的线性二次型调节器控制器,并进行了稳定性分析。为了消除干扰引起的误差,将前馈控制与线性二次型调节器控制器相结合。为了验证所设计控制器的路径跟踪性能,基于在CarSim中建立的高保真整车模型进行了数值仿真。此外,还进行了实际道路试验。仿真和实验结果表明,所设计的控制器具有良好的路径跟踪性能。另外,路径跟踪控制器对不同的纵向速度和路面摩擦系数具有良好的鲁棒性。
关键词:四轮转向,自主地面车辆,路径跟踪,线性变参数系统
1 引言
近年来,随着各种交通问题(包括拥堵和事故)的增加,自主地面车辆(AGV)已成为研究的热点。AGV的研究主要集中在环境感知、规划决策和运动控制方面。运动控制是AGV的基本能力和首要任务,主要包括纵向运动控制和侧向运动控制。AGV的纵向运动控制可以描述为跟踪目标纵向速度。AGV的侧向运动控制可以描述为路径跟踪控制,其目的是使AGV自动跟踪目标路径。
AGV的路径跟踪控制问题可定义为最小化侧向偏移和航向误差。各种控制算法已应用于路径跟踪控制,包括滑模控制(SMC)、最优控制、模糊控制、模型预测控制(MPC)、鲁棒控制和智能控制。然而,大多数路径跟踪控制算法是为前轮转向(FWS)的AGV设计的。与前轮转向的AGV相比,四轮转向(4WS)的AGV具有更多的运动控制自由度(DoF)。这表明4WS AGV具有更好的路径跟踪性能。
基于逆推方法为4WS AGV设计了一种路径跟踪控制器,该控制器能够很好地跟踪具有锐边的轨迹和圆形轨迹。为了处理系统不确定性,如转弯功率扰动、路径半径波动和侧风干扰,基于SMC为4WS车辆设计了自动的路径跟踪控制器,这也表明自动4WS控制器比FWS控制器具有更稳定和更精确的路径跟踪能力。采用MPC和前馈控制设计了一种集成路径跟踪控制器,可显著提高车辆稳定性和对期望路径的跟踪性能。尽管MPC路径跟踪控制器表现出良好的性能和鲁棒性,但它会带来大量的计算,并且难以在实际中使用普通硬件实现。为了减少车辆参数不确定性的影响,采用μ综合法为4WS AGV设计了鲁棒路径跟踪控制器。为了减少计算量并使控制器更实用,线性二次调节器(LQR)、比例积分微分(PID)和模糊控制广泛应用于路径跟踪控制器的设计。同时,采用遗传算法对控制器参数进行优化,使控制器更加具有自适应能力。
由以上分析可知,所设计的控制器应具有良好的路径跟踪性能和自适应能力。此外,控制器还应具有很强的鲁棒性,以应对系统不确定性和外部干扰。事实上,我们已经使用H鲁棒控制和μ综合法设计了一些用于路径跟踪的鲁棒控制器算法。为了提高对参数不确定性和干扰的鲁棒性,设计的鲁棒控制器的阶数通常非常高。使用普通车辆电子控制单元(ECU)进行测试很困难。为了满足上述性能要求,使控制器更加实用,本文采用线性变参数(LPV)系统和LQR算法,并结合前馈控制设计了4WS AGV的路径跟踪控制器。
文章的其余部分组织如下。在“4WS AGV的结构”一节中,介绍了4WS AGV的结构。在“4WS AGV控制器设计的建模”一节中,基于二自由度简化动力学模型,建立了4WS AGV的路径跟踪模型和LPV系统模型,用于路径跟踪控制器设计。在“路径跟踪控制器的设计”部分,使用线性二次调节器(LQR)和前馈控制设计了路径跟踪控制器,并分析了闭环控制系统的稳定性。在“仿真分析”部分和“实验验证”部分,进行了仿真和实验,以验证路径跟踪控制器的性能。最后,在“结论”部分总结了本文的工作。
2 4WS AGV的结构
图1显示了名为春晖ZX的4WS AGV原型车辆,从中可以看出,4WS AGV主要由四个线控转向(SBW)模块组成。SBW模块集成了转向系统、驱动系统、制动系统和悬架系统。正是因为SBW模块,4WS AGV的每个车轮的转向角都可以独立控制。也就是说,4WS AGV具有更多的动态控制自由度。因此,4WS AGV的转向和运动模式比普通车辆更加多样化。这意味着4WS AGV可以在低速时通过前后轮反相转动来减小转弯半径以提高机动性。在高速行驶时,4WS AGV可通过主动后轮转向(ARS)实现零质心侧偏角和期望的横摆角速度,以提高操纵稳定性。为此,4WS AGV可被视为一种理想的AGV平台。
考虑到蓄电池重量占车辆质量的很大一部分,因此蓄电池在电动汽车中的位置对车辆稳定性有着重要影响。所有电池均均匀放置在座椅下。

图1 4WS AGV
对于路径跟踪控制,将全球定位系统(GPS)和惯性导航系统(INS)相结合的定位系统应用于4WS AGV。个人计算机(PC)用于监控和收集来自控制器局域网(CAN)的数据。所有的控制算法都下载到ECU并在ECU中运行。传感器、执行器和ECU之间的通信通过CAN总线实现,数据采集通过CAN工具进行。此外,4WS AGV的主要结构参数如表1所示。
表1 4WS AGV的结构参数
3 4WS AGV控制器设计的建模
A.简化动力学模型
在本节中,为控制器设计建立了4WS AGV的简化动力学模型。为此,忽略了俯仰和侧倾运动,仅考虑水平面上的侧向和横摆运动。假设4WS AGV的纵向速度为恒定值。因此,具有2个自由度的简化平面运动模型如图2所示。
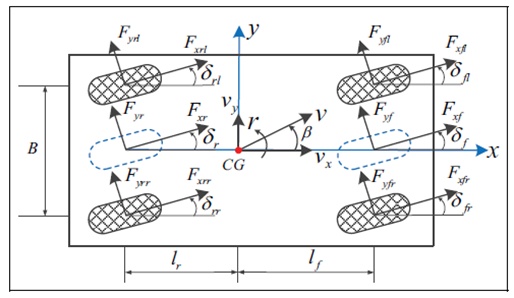
图2 4WSAGV的平面运动模型
此外,四轮平面运动模型可以简化为两轮单轨模型,即图2中的蓝色模型。车身坐标系固定在4WS AGV的重心(CG)处。Fxi和Fyi(i=fl、fr、rl、rr、f、r)分别表示每个轮胎的纵向力和侧向力。vx和vy分别是纵向速度和侧向速度。β和r是质心侧偏角和横摆角速度。
两个模型中的转向角关系应满足Ackerman转向几何结构,可表示为以下

其中δi(i=fl、fr、rl、rr、f、r)表示每个车轮的转向角。
基于牛顿第二定律,4WS AGV的侧向动力学模型可推导如下

式中,ay表示4WS AGV重心处的侧向加速度。
此外,4WS AGV的横摆动力学模型可以表示为

假设高速时车轮的转向角非常小,则得出 和
和 。因此,等式(2)和(3)可简化为
。因此,等式(2)和(3)可简化为
和。因此,等式(2)和(3)可简化为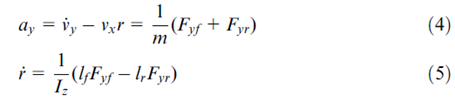
由于假设车轮的转向角在高速时非常小,因此可以认为轮胎侧偏角非常小。因此,可以得到轮胎侧向力与轮胎侧偏角之间的线性关系,可以表示为




编辑推荐




最新资讯
-
中汽中心工程院能量流测试设备上线全新专家
2025-04-03 08:46
-
上新|AutoHawk Extreme 横空出世-新一代实
2025-04-03 08:42
-
「智能座椅」东风日产N7为何敢称“百万级大
2025-04-03 08:31
-
基于加速度计补偿的俯仰角和路面坡度角估计
2025-04-03 08:30
-
《北京市自动驾驶汽车条例》正式实施 L3级
2025-04-02 20:23
