




 广告
广告





















































智能车多传感器信息融合及算法简介
2021-09-12 12:29:40· 来源:跋山涉水

一、车企和科技公司跑步进入自动驾驶赛道尽管目前自动驾驶传感器选择存在视觉主导方案和激光雷达主导方案的分歧。随着激光雷达价格不断下降,其有望成为未来自动
一、车企和科技公司跑步进入自动驾驶赛道
尽管目前自动驾驶传感器选择存在视觉主导方案和激光雷达主导方案的分歧。随着激光雷达价格不断下降,其有望成为未来自动驾驶汽车的主流配置 ,故激光雷达产业将有着巨大的增长空间。面对即将到来的百亿级市场,无论是车企还是科技公司,都在以各种方式跑步进入这个市场,对激光雷达产业进行“多维度”发力。

图1 目前各车企自动驾驶车型的传感器数量及类型
二、传感器融合软件算法是提升精度的重要途径
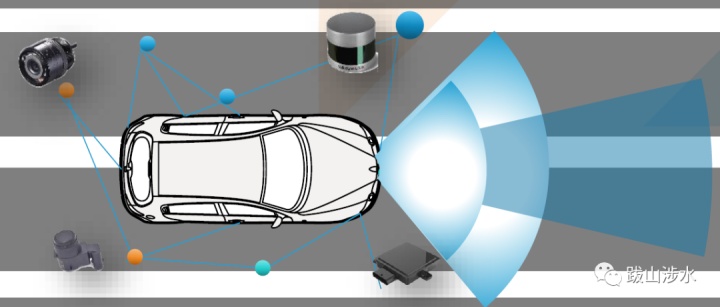
多传感器信息融合(Multi sensor Information Fusion,MSIF ),指将自动驾驶摄像头、激光雷达、毫米波雷达以及超声波雷达等多种传感器各自分别收集到的数据进行融合,然后利用计算机技术将来自多传感器或多源的信息和数据,在一定的准则下加以自动分析和综合,以完成所需要的决策和估计而进行的信息处理过程,以便更加准确可靠地描述外界环境,提高系统决策的正确性。
自动驾驶算法覆盖感知、决策、执行三个层次:感知类算法,包括SLAM 算法、自动驾驶感知算法;决策类算法包括自动驾驶规划算法、自动驾驶决策算法;执行类算法主要为自动驾驶控制算法。

图二 自动驾驶主要算法
想要实现高精度的自动驾驶体验,融合算法要足够优化,因为多传感器的使用会使需要处理的信息量大增,这其中甚至有相互矛盾的信息,如何保证系统快速地处理数据,过滤无用、错误信息,从而保证系统最终做出及时正确的决策十分关键。目前多传感器融合的理论方法有贝叶斯准则法、卡尔曼滤波法、D-S 证据理论法、人工神经网络法等 。

图三 多传感器融合的理论方法
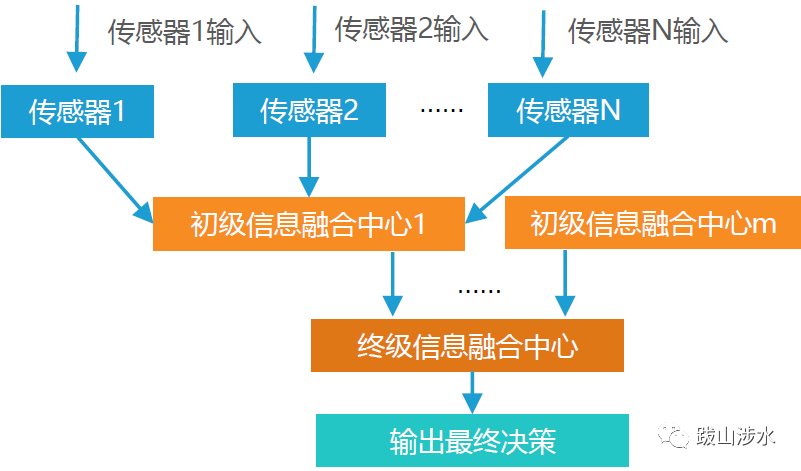
多传感器信息融合技术的基本原理与人脑综合处理信息的过程相似,在此过程中,智能驾驶汽车要充分地利用多源数据进行合理支配与使用,而信息融合的最终目标则是基于各传感器获得的分离观测信息,通过对信息多级别、多方面组合导出更多有用信息。这不仅是利用了多个传感器相互协同操作的优势,而且也综合处理了其它信息源的数据来提高整个传感器系统的智能化。
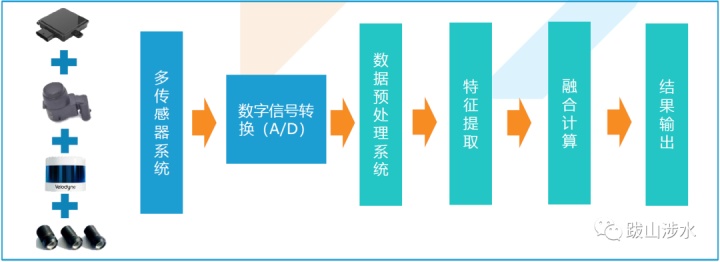
图四 多传感器信息融合技术的原理示意
三、多传感器融合的体系结构:分布式、集中式和混合式
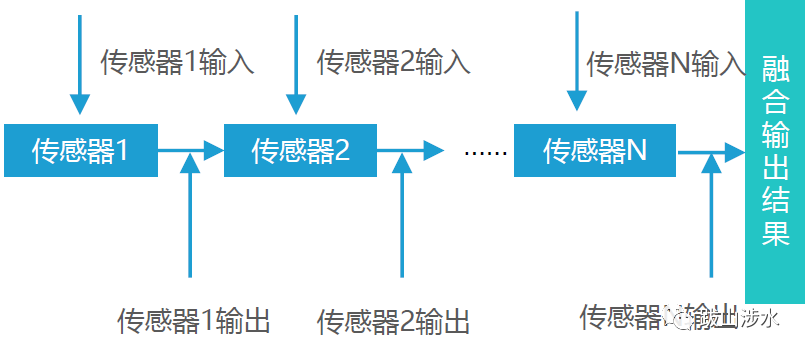
1)分布式: 先对各个独立传感器所获得的原始数据进行局部处理,然后再将结果送入信息融合中心进行智能优化组合来获得最终的结果。分布式对通信带宽的需求低、计算速度快、可靠性和延续性好,但跟踪的精度却远没有集中式高 。
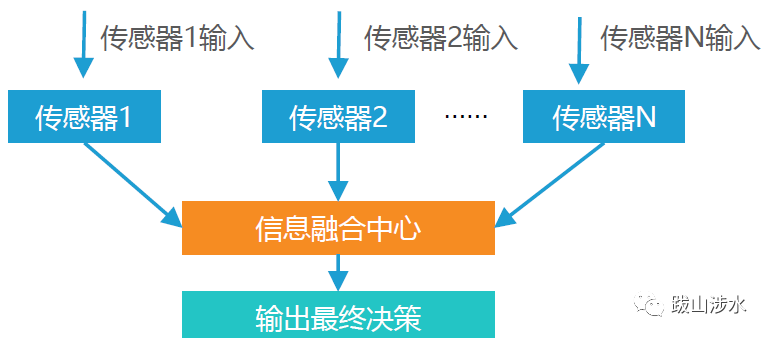
2)集中式: 将各传感器获得的原始数据直接送至中央处理器进行融合处理 可以实现实时融合。其数据处理的精度高、 算法灵活,缺点是对处理器的
要求高,可靠性较低,数据量大 。
3)混合式: 混合式多传感器信息融合框架中,部分传感器采用集中式融合方式,剩余的传感器采用分布式融合方式。混合式融合框架具有较强的适应能力 兼顾了集中式融合和分布式的优点,稳定性强。混合式融合方式的结构比前两种融合方式的结构复杂,缺点是加大了通信和计算成本 。



编辑推荐




最新资讯
-
大卓智能端到端直播实测,16公里复杂路段挑
2025-04-25 17:16
-
《汽车轮胎耐撞击性能试验方法-车辆法》等
2025-04-25 11:45
-
“真实”而精确的能量流测试:电动汽车能效
2025-04-25 11:44
-
GRAS助力中国高校科研升级
2025-04-25 10:25
-
梅赛德斯-AMG使用VI-CarRealTime开发其控制
2025-04-25 10:21
