




 广告
广告





















































汽车高速行驶时自动紧急转向避撞的前馈与反馈跟踪控制的研究
2021-09-12 20:09:05· 来源:汽车制动之家

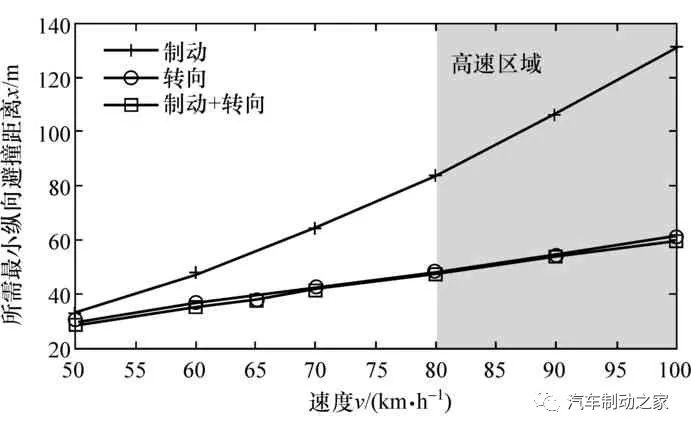
图3 最小纵向避撞距离(μ=0.3,a=3.5 m)
2 转向避撞系统总体框架与参考路径规划
为安全精确地完成转向避撞操作,应保证车辆实施紧急转向时通过的轨迹能够有效避开障碍物。因此,首先需要对转向避撞轨迹进行规划,其次还需对车辆进行控制,从而使其能够准确跟踪所规划的参考轨迹。自动紧急转向避撞系统总体框架见图4。采用前馈与反馈相结合的跟踪控制策略,通过车辆实际响应及其与预先设定的参考轨迹侧向位移之间的偏差进行控制,使车辆能够有效避撞。值得注意的是,在车辆实际响应计算中,选取的车辆模型与真实情况越接近,实际应用时的跟踪效果越好,但同时计算量也会越大,控制器设计的难度也会更大。

图4 自动紧急转向避撞系统总体框架
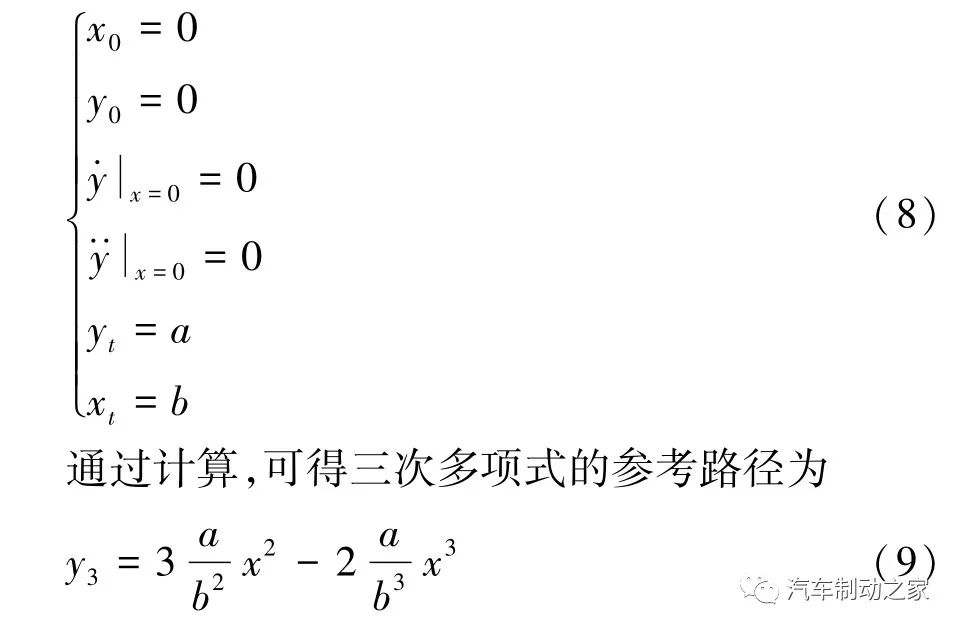
在车辆转向避撞参考路径的设计过程中,假定车辆在采取转向避撞之前按直线行驶且车速保持不变,车辆初始侧向速度、纵向加速度、纵向位移和侧向位移均为0,前方障碍物为静止状态。转向避撞参考路径常见的有三次多项式规划和五次多项式规划策略。
三次多项式参考路径的表达式为

式中:x为车辆的纵向位移;y des为车辆的理想侧向位移;ci为拟合系数(后续类似)。
设车辆的初始坐标为(x0,y0),避撞后的终点坐标为(xt,yt)。在路径的起点,因为车辆的运动状态为匀速直线行驶,故车辆此时的横向位移y0=0,横向车速
=0,横向加速度
=0。避撞结束时车辆的横向位移yt=a,纵向移动距离xt=b。可得该参考轨迹的约束条件为
在五次多项式参考路径中,可进一步考虑车辆避撞结束时刻的侧向速度和侧向加速度约束条件,其表达式为
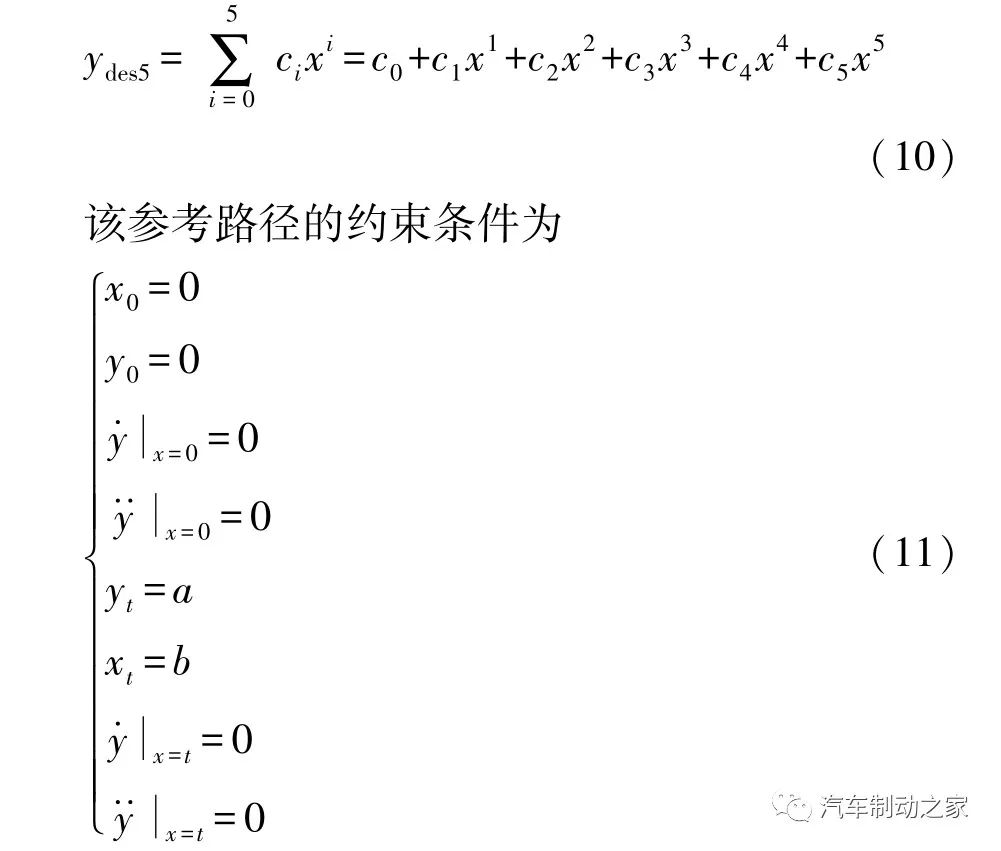
通过计算,可得五次多项式的参考路径为

同理,在转向避撞参考路径的约束条件中,可进一步考虑车辆初始时刻和结束时刻的侧向加速度变化率,从而进行七次多项式参考路径的规划。假定其表达式为

通过计算求解,最终可得七次多项式的参考路径为
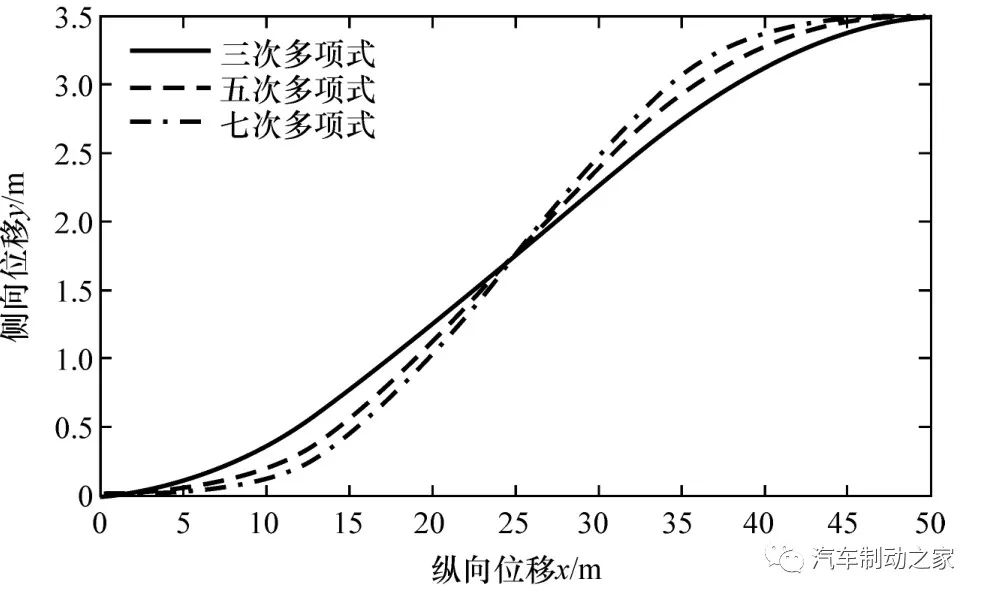
图5 不同多项式参考路径对比
在车辆纵向速度为80 km/h,前方障碍物纵向距离b为50 m,车辆侧向偏移a为3.5 m的约束条件下,对比三次多项式、五次多项式和七次多项式规划下的侧向位移如图5所示。对比五次与七次多项式下的参考横摆角速度和横摆角加速度,如图6和图7所示。由图可见,相比三次多项式和五次多项式,七次多项式的参考路径由于考虑了开始时刻和结束时刻的侧向加速度变化率,其避撞过程会更加缓和。图8为采用七次多项式路径规划的情况下,以不同车速进行转向避撞时,车辆侧向参考位移随时间的变化曲线。
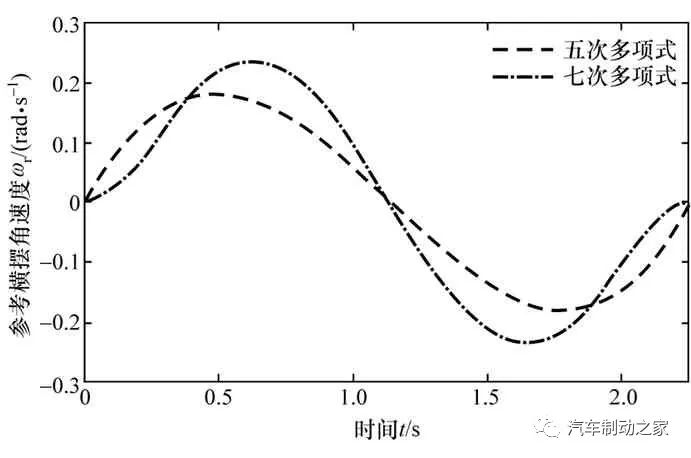
图6 参考横摆角速度对比
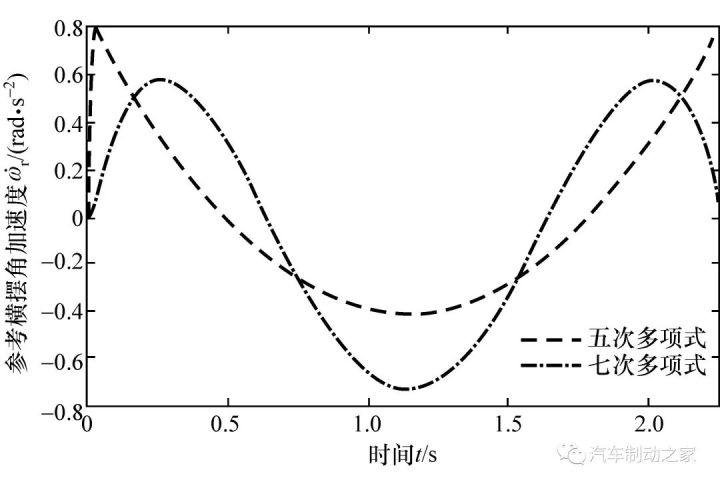
图7 参考横摆角加速度对比
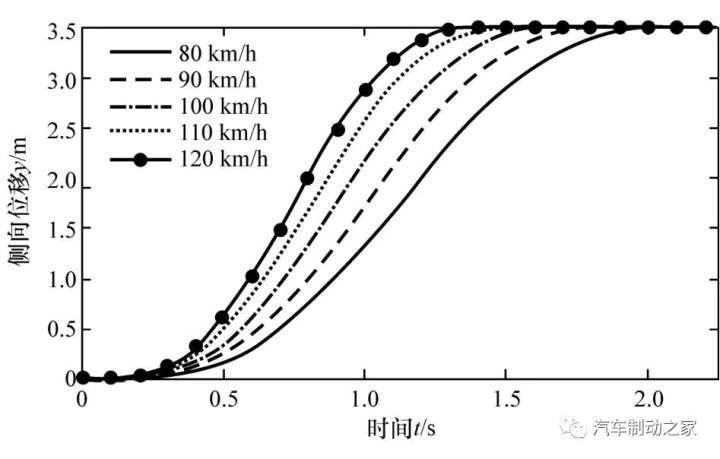
图8 以不同车速在七次多项式路径规划下的车辆侧向参考位移
- 下一篇:NVH测试中的扭振测试
- 上一篇:电动汽车底盘分析与调校研究



编辑推荐




最新资讯
-
大卓智能端到端直播实测,16公里复杂路段挑
2025-04-25 17:16
-
《汽车轮胎耐撞击性能试验方法-车辆法》等
2025-04-25 11:45
-
“真实”而精确的能量流测试:电动汽车能效
2025-04-25 11:44
-
GRAS助力中国高校科研升级
2025-04-25 10:25
-
梅赛德斯-AMG使用VI-CarRealTime开发其控制
2025-04-25 10:21
