




 广告
广告





















































汽车高速行驶时自动紧急转向避撞的前馈与反馈跟踪控制的研究
2021-09-12 20:09:05· 来源:汽车制动之家

3 前馈与反馈跟踪控制
车辆转向避撞过程可分成两个操纵阶段,即车道变换和车道保持。本文中在车辆轨迹跟踪控制的设计上相应地包括两个部分:前馈控制和反馈控制。其中,前馈控制主要用于车辆在换道过程中的轨迹跟踪,同时缩短车辆跟踪预定路径的反应时间。理论上讲,只要前馈模型足够准确,前馈得出的前轮转角施加给车辆的响应与参考轨迹应该没有差异。但实际上,任何车辆模型都不可能绝对精确。此外,在车辆行驶过程中不可避免地出现其它扰动情况,如侧向风干扰,因此,还须对转向系统进行额外的反馈控制。反馈控制一方面用来修正因扰动、噪声和参数不确定性引起的误差,另一方面则用来保证车辆在换道后的轨迹保持,确保路径跟踪的精确性。
前馈控制所需的转向盘转角可通过预先获得的参考路径和车辆模型计算得出。由于实际车辆的转向传递特性非常复杂,而且非线性因素难以用于前馈控制器的设计,因此,在前馈控制器的设计上对车辆的转向传递特性采用了较为简单的线性2自由度转向动力学模型,即

式中:ωr为跟踪参考路径的横摆角速度;i为转向盘角传动比;v为车速;L为轴距;δFF为所需的前馈车轮转角;K为车辆稳定性因数。
在输出反馈控制器的设计中,车辆相对道路的侧向位置通常以车辆某一前部位置(预瞄点)为基准。若假定方向角误差e2很小,则弦长可近似等于弧长,车辆参考路径y ref相对实际行驶路径y p的侧向偏差ey可通过当前时刻侧向位移偏差e1、预瞄距离d s和方向角误差e2计算得出。同时,由于PID控制算法简单,有较好的鲁棒性和可靠性,因此采用PID控制算法实现车辆侧向位移的反馈跟踪控制。通过多次反复试算,最终确定PID控制器参数值,即K P取10,K I取0,K D取30。

式中δFB为所需的反馈车轮转角。
综合前馈控制与反馈控制,本文所提出的车辆转向避撞控制策略的总转向盘转角输入值为

此外,进一步考虑机械转向系统的局限性,确保所规划的参考路径合理可行,对转向盘转角及其变化率进行了如下约束:

4 算例分析
4.1 车辆模型
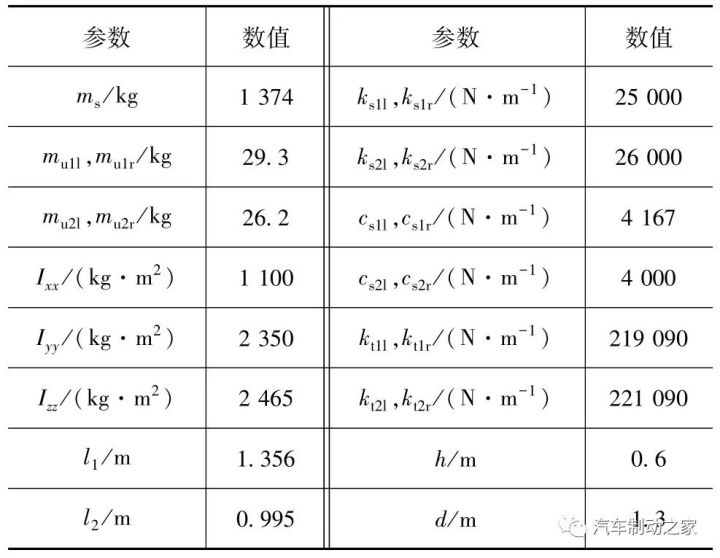
在前文中采用简化的车辆质点模型分析了转向避撞和制动避撞的有效性,为进一步研究车辆在转向避撞过程中的实际响应,还应对车辆底盘动力学进行详细建模研究。同时,高速车辆转向避撞往往表现出较强的非线性特性,传统2自由度线性模型难以满足要求。本文中所使用的车辆模型为转向和悬架系统相统一的动力学模型,具体建模过程参见文献[11]。车辆模型主要参数见表2。其中,m s为簧上质量,m u ij为簧下质量(i=1,2表示前、后,j=l,r表示左、右,下同),Ixx为簧上质量绕车辆坐标系x轴的等效转动惯量,Iyy为簧上质量绕车辆坐标系y轴的等效转动惯量,Izz为整车绕车辆坐标系z轴的等效转动惯量,l1、l2为整车质心至前、后轴距离,k s ij为单侧悬架系统等效的垂向刚度,c s ij为单侧悬架系统垂向阻尼,k t ij为单侧轮胎垂直刚度,h为侧倾力臂,d为轮距。
表2 车辆参数
轮胎模型采用魔术公式轮胎,其表达式为

式中:Y(x)代表纵向力、侧向力和回正力矩;B为刚度因子;C为形状因子;D为峰值因子;E为曲率因子;ΔSv为曲线的垂直方向漂移。
图9为前轮胎名义侧向力与名义纵向力的关系曲线。
4.2 避撞场景构建与仿真分析
假定车辆以80 km/h车速行驶,在t=0时刻车辆前方50 m处出现某一静止障碍物,车辆须进行换道操作,换道后车辆保持直线行驶。在t=3 s时刻出现侧向风干扰,侧向风幅值为2 000 N。在t=3.75 s时刻侧向风消失。行驶至t=4.5 s时刻发现前方50 m处又出现另一静止障碍物,车辆须再次进行换道操作,换道后车辆继续保持直线行驶。避撞场景示意如图10所示。
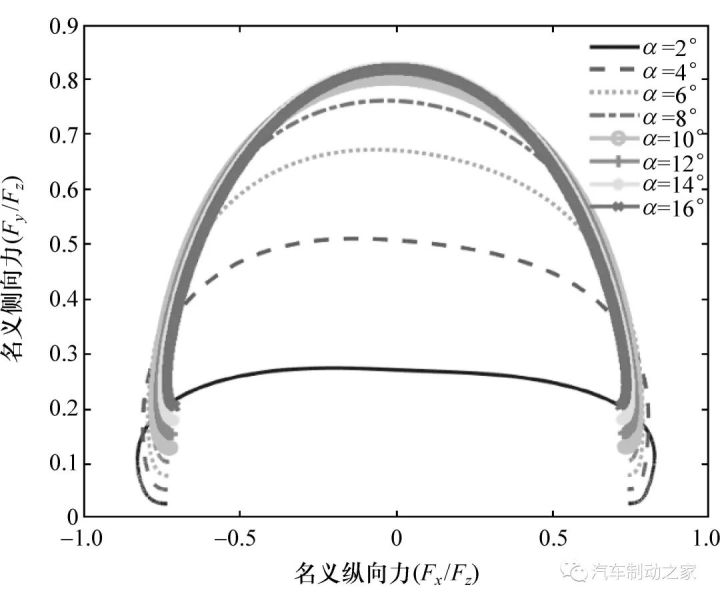
图9 不同车轮侧偏角下轮胎名义侧向力与名义纵向力的关系曲线
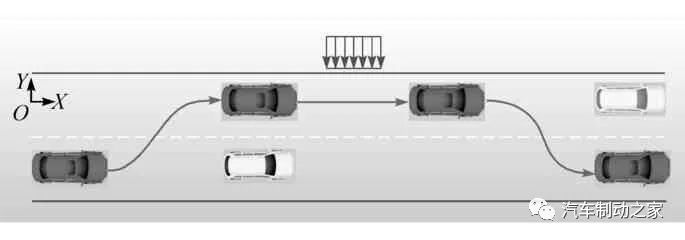
图10 车辆避撞场景示意
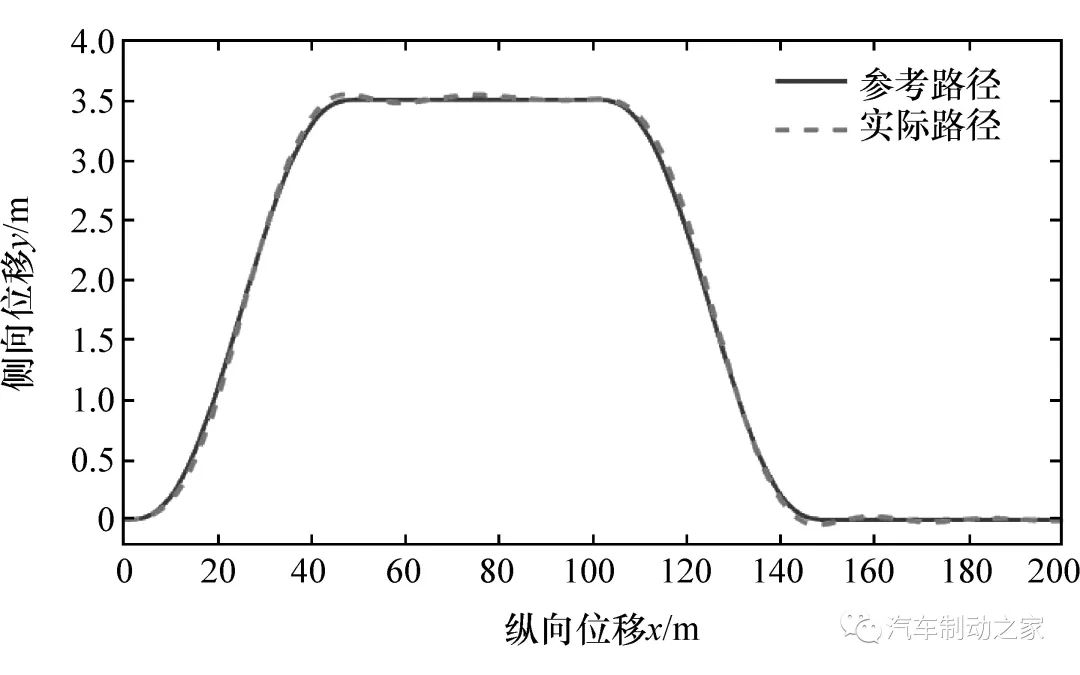
图11 车辆侧向-纵向位移
采用七次多项式拟合的参考路径,结合前馈+反馈的跟踪控制策略,车辆自动紧急转向避撞的响应情况如图11~图15所示。其中,图11和图12为车辆侧向位移和侧向位移跟踪误差的响应情况。可以看出,受控车辆实际行驶轨迹与参考路径基本吻合,侧向位移跟踪误差最大为0.02 m,表明所提出的控制算法具有较好的鲁棒性和及时性,能很好地跟踪预先给定的参考路径,并通过转向实现有效避撞的目的。
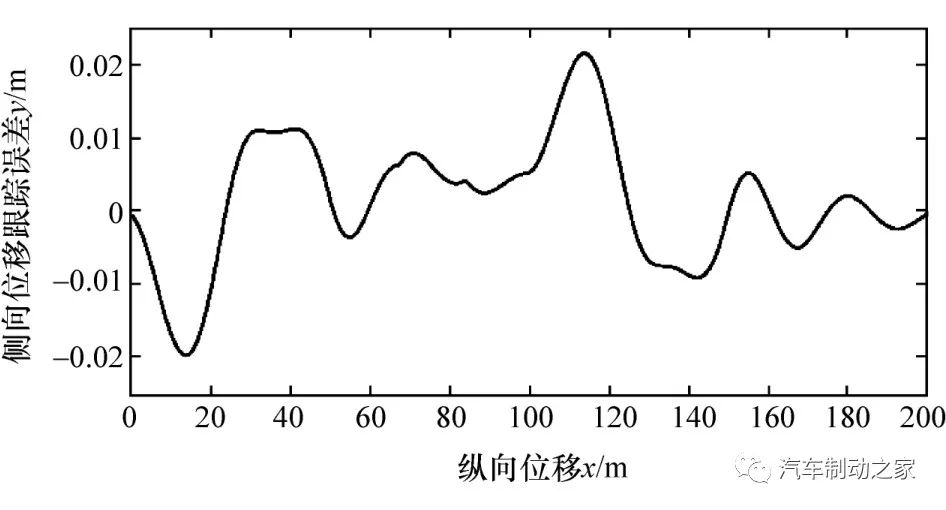
图12 车辆侧向位移跟踪误差
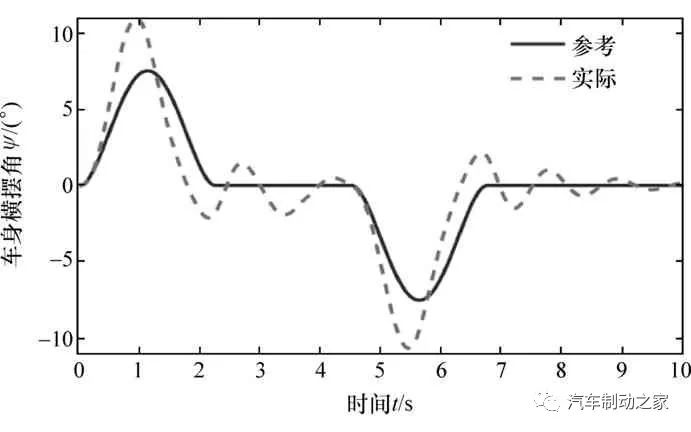
图13 车辆横摆角
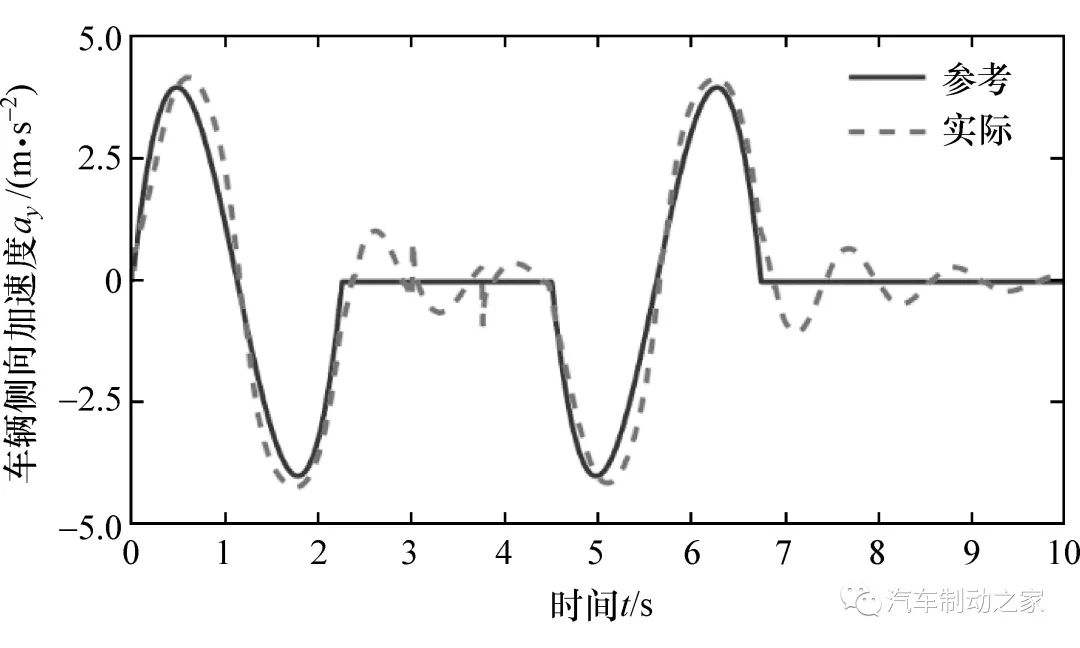
图14 车辆侧向加速度
从图13也可看出,实际车辆的横摆角响应与参考横摆角的趋势基本吻合,与参考横摆角相比,车辆的实际横摆角峰值相对偏大,并出现一定程度的波动,这是因为本文中所跟踪的车辆系统为转向与悬架相统一的非线性车辆模型,车辆系统响应具有一定程度的延时性和瞬态特性。另外,从图14可看出,实际车辆的侧向加速度与参考侧向加速度也基本吻合,由于受侧向风干扰影响,实际车辆在t=3 s和t=3.75 s时刻的侧向加速度受到一定的冲击。图15为实际车辆车身侧倾角响应。可以看出,车辆在转向避撞过程中,车身侧倾角也会出现一定程度的波动。
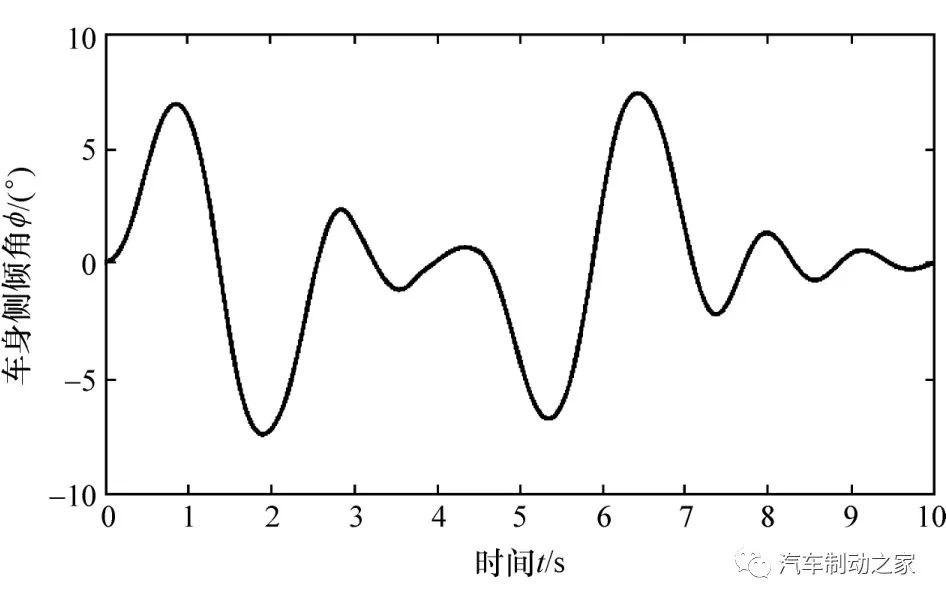
图15 车身侧倾角
5 结论
通过建立汽车避撞质点模型,对比分析了制动避撞、转向避撞和制动与转向联合避撞对车辆最小纵向距离的要求。结果表明,与制动避撞相比,转向避撞对纵向距离的要求显著减小,车速越高、路面附着系数越小,效果越明显,与制动和转向联合避撞的效果十分接近。在此基础上,以转向避撞为手段,选取过渡较为缓和的七次多项式规划参考路径,构建了前馈与反馈相结合的跟踪控制策略,通过车辆转向与悬架统一动力学模型的避撞仿真试验,表明所提出的路径跟踪控制算法有效可行,能使车辆合理避撞。
- 下一篇:NVH测试中的扭振测试
- 上一篇:电动汽车底盘分析与调校研究



编辑推荐




最新资讯
-
推荐性国家标准《乘/商用车电子机械制动卡
2025-04-30 11:13
-
载荷分解
2025-04-30 10:46
-
布雷博在上海开设亚洲首个灵感实验室
2025-04-30 10:25
-
组分性能对锂离子电池卷芯挤压力学响应的影
2025-04-30 09:00
-
美国发布自动驾驶新框架,放宽报告要求+扩
2025-04-30 08:59
