




 广告
广告





















































汽车操纵性能的主观和客观评价
2021-09-12 21:30:53· 来源:轮胎动力学协同创新联盟订阅号

37.1简介理想的车辆性能的概念目标可以是(1)愉悦的驾驶感,(2)转向轻便,(3)易于控制,以及(4)操 纵安全性。该概念基本上基于(a)舒适性,(b)灵活性
37.1简介
理想的车辆性能的概念目标可以是(1)愉悦的驾驶感,(2)转向轻便,(3)易于控制,以及(4)操 纵安全性。该概念基本上基于(a)舒适性,(b)灵活性,(c)精确度和(d)安全性。作为车辆动力学的一个类别,动力学性能主要通过操纵稳定性和平顺性来具体表现。如今,尽管不同的汽车或轮胎公司采取各种测试和评估方法,但最终只能由专业驾驶员通过多次测试对其进行主观评价来评估它们。即使在同一家公司内,这些方法也可能因每个测试工程师而异。
主观评价传统上由经过专门培训的工程师或技术人员进行,而不是由车辆动力学专家进行。由于一般而言他们没有广泛的车辆动力学知识,因此主观评估的基本车辆动力学概念尚未完全建立。为了成功地表征性能,应该从根本上理解这个概念。应该指出的是,没有自己的主观评价经验,任何人都很难理解其他人的主观评价。
每个测试工程师都有自己的主观测试和评估技术,这些技术经验是由专家培训师,经验丰富者和他自己做过的各种实践积累的。实际上,大多数测试工程师只知道如何对车辆性能进行主观评价。然而,他们无法用科学语言表达他们的感性感受。这就是为什么在车辆动力学的发展中始终存在不可触碰的障碍。在过去的半个世纪中,车辆动力学已经发展起来,以使汽车拥有更好的操纵稳定性和行驶平顺性[1-10]。然而,与其他技术相比,车辆动力学的发展并不大。
关于评价操纵稳定性和驾驶平顺性能的主观测试的实用文档很少公开。幸运的是,ISO国际标准为各种操纵稳定性客观测试提供了非常标准化的程序[11-17]。但是,ISO国际标准或任何其他文档尚未公开有关实际驾驶平顺性测试的标准化程序。相反,ISO国际标准2631-1提出了影响人身体健康,舒适性和晕动病的周期性的、随机和瞬态的整车振动的测量方法[18]。
一些研究提供了客观测量和整车操稳感知之间的许多相关方法[19-21]。Crolla等人进行了一项综合研究,使用组合的主观-客观方法进行操稳性能评估[22]。Norman和Farrer分别对客观评估中心区操稳性能进行了实践研究[23,24]。Salaani等人对于中心区和非中心区驾驶的转向路感的试验评估做了很好的研究[25]。其他一些研究试图在瞬态转向特性的客观测量和主观评价之间进行实际关联[26-28]。
许多研究使用人类的不适感来客观评估平顺性能[29-35]。Ushijima等实际研究了不平路面冲击的客观测量与主观评估之间的相关性[36]。还有一些其他工作也使用了振动效应来客观评估冲击力[37,38]。安曼等人认为声音和振动对人类对冲击力有影响[39]。
当我们谈论操纵稳定性能时,我们经常使用有些术语,例如直线,转向,转弯和稳定性[40-43]。操稳性能被认为是车辆和驾驶员的组合特征。实际上,其主观评估通常受到驾驶员评估能力和偏好的影响。在驾驶员本人的影响因素最小的情况下评估此性能非常重要。
本手册中给出的主观评价和主观测试是世界上许多汽车和轮胎公司在汽车或轮胎的认证过程中常用的非常实用的测试。这里,主观评价和主观测试试图基于其实际概念进行标准化。作为进行主观评价的工具,本手册对主观测试进行了描述。对于每个主观测试,解释了其基本概念,测试程序和驾驶条件。即使其概念与其他测试方法的概念一致,其测试程序和/或驾驶条件也可能与其他测试方法不同。
为了良好地进行主观评价,操纵稳定性和平顺性能可以主要分为五种能力。每种能力都被分类为相应的特征。与主观评估类似,主观测试主要分为五种操作。每次操作都由几个测试和特殊设计的程序组成。
作为主观测试的补充方法,客观测试用来获得最终用于车辆动力学分析的客观测试数据。使用从测量数据中提取的车辆动力学变量,进行车辆动力学分析以解释主观评价结果。因此,在这里我们定义了(a)主观评价变量,(b)客观测量变量和(c)物理感知变量。
为了主观地评价操纵稳定性和平顺性能的每个特征,主观评价变量在感觉上被评估。客观测量变量用于客观地描述代表特征的车辆运动。物理感知变量是测试工程师实际感知的物理变量。最终,这些变量可以用客观测量变量表示。
37.2 主观评估
SAEJ1441解释了车辆操纵稳定性的10点主观评定量表[44]。但是,它没有给出如何进行主观评价。在实践中,大多数汽车制造商和轮胎公司正在使用这种量表。
在本手册中如图37.1所示,车辆的操纵稳定性和平顺性能按五种能力分组,例如(1)直线性,(2)转弯特性,(3)可控性,(4)稳定性和(5)舒适性。每种能力都被特别地分为几个特征。图 37.1 中给出的特征的术语习惯上用于表达它们的感知概念,而不是它们的科学定义[40-43]。它们的名称在工程意义上可能不合适,并且根据每个用户而略有不同。所有特征可能都是彼此独立的,同时它们也会受彼此造成的结果影响。即使不同的特征也可能有相同的结果。
无论自由转向还是固定转向,直行性是指没有任何明显地偏离直线路径的直线行驶能力。转弯特性是 一种转向能力,可以通过更好的操纵方式和更柔和的转向来实现预期的转向反应。在驾驶车辆时,控制车辆使其遵循预期路径的容易程度是可控性。稳定性是车辆行为的收敛特性,甚至超出了抓地力极限。舒适 性是在不舒适,不平坦或不规则道路上行驶的车辆的乘坐舒适性特征。
直线性主要受到前轮胎由于外部扰动(自由或固定转向)的反应的影响。前轮胎对一系列转向操作的响应以及后轮胎对前轮胎行为的跟进能力决定了转向特性,可控性和稳定性。簧载质量的侧倾、俯仰运动也是影响稳定性和可控性的关键因素。
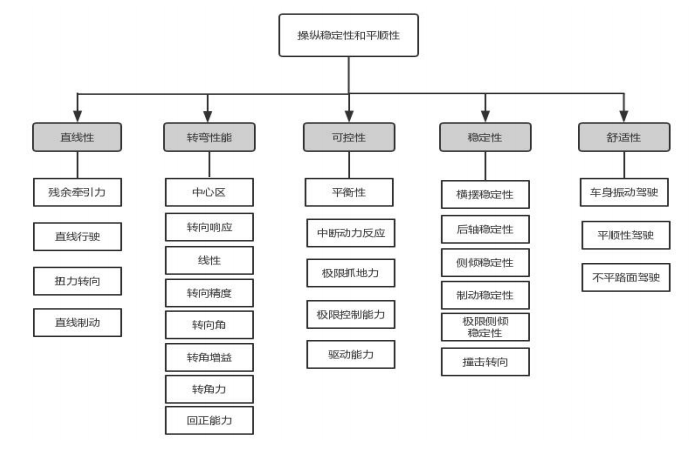
图37.1 操纵稳定性和平顺性主观评价
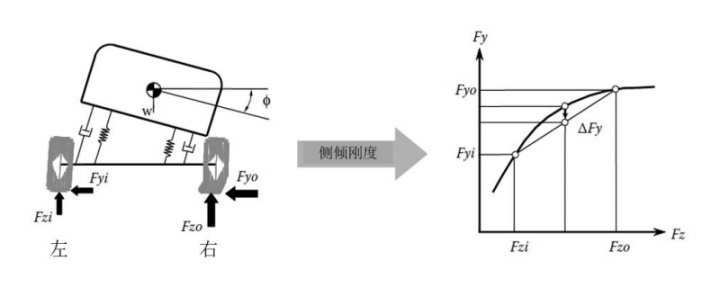
图37.2 从内轮胎到外轮胎的侧向载荷转移
在转弯时,滚动阻力会产生从内轮胎到外轮胎的载荷转移,然后降低每个车轴的总侧向力(参见图37.2)。这种侧向力的减小不仅会导致减少抓地力,还会改变前后车轴之间的抓地力平衡。这种平衡主要决定了车辆的转向特性,例如瞬态不足转向和过度转向。如果它导致过度的不足转向或过度转向,则由于可控性差和稳定性差而导致操纵稳定性能恶化。
如图37.3a所示,在向前直线驱动行驶的同时,由于前后负载传递,前轴会失去一些抓地力。另一方面,后轴获得更多抓地力。前轮驱动车辆在低摩擦道路上行驶时,基于所谓的摩擦椭圆概念,驱动操作会使更多的前轴抓地力减少。在转弯时驱动的情况下(参见图37.3b),车辆表现出更多的不足转向,这使得驾驶员更难以控制车辆使其遵循预定路径。
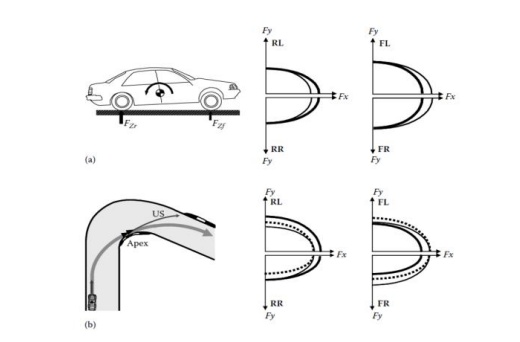
图37.3
在(a)直线驱动
和(b)转弯驱动时的纵向载荷转移和轮胎力变化
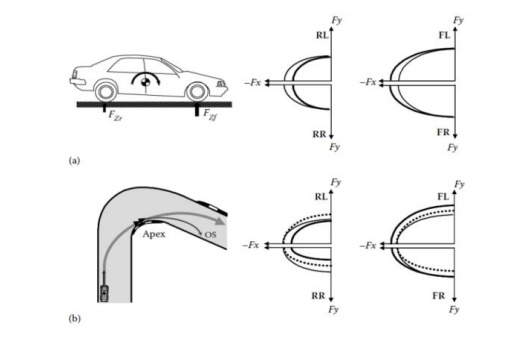
图37.4
在(a)直线制动
和(b) 转弯制动时的纵向载荷转移和轮胎力变化
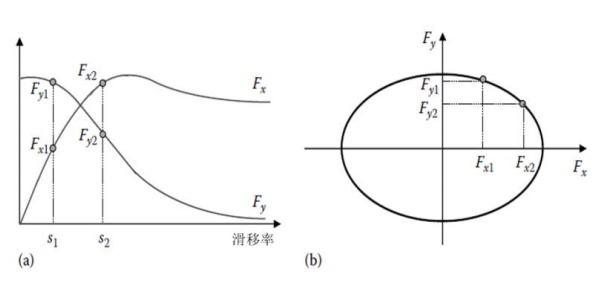
图37.5 摩擦椭圆概念:
(a)轮胎侧向力和纵向力;(b)摩擦椭圆
在直线行驶制动的情况下,前后轴的负载传递减少了后轴的抓地力,而前轴抓地力增加更多,如图37.4a所示。在转弯时,基于摩擦椭圆概念,在低摩擦道路上行驶的后轮驱动车辆的后轴抓地力减少更多(参见图 37.4b)。有时它会在转弯时产生超出控制限制的过度转向,这样普通的驾驶员很容易发生事故。
对侧偏的轮胎进行驱动或制动操作,会增加其纵向力的大小。相反,由于纵向滑移和侧偏,减少了侧向力的大小,如图37.5a所示。观察到所得到最大的轮胎摩擦合力受到椭圆的限制(参见图37.5b)。这就是摩擦椭圆的概念。图 37.6和37.7分别示出了在高摩擦道路(干燥表面)和低摩擦道路(湿表面)上右转弯时车辆的所有轮胎力的摩擦椭圆。
当测试工程师进行主观评价时,他们使用主观评价变量进行判断。到目前为止,通过专门的培训、自我训练和测试经验,测试工程师只是以感觉的形式而不是物理形式来学习这些变量。测试工程师认为,在各种主观测试中,所有这些变量在战术,视觉和听觉上都是可感知的。但是,他们并不能直接感知所有这些变量。相反,实际上,他们会在感知上测量物理感知变量,这将在后面详细讨论。
作为关于转向行为的主观评价变量,可视地测量转向盘转向角度,并且策略上地感测转向盘力矩。所需的转向盘转向角为转向增益提供参考。应用相同的转向盘转向角来评估不同车辆的转向响应。根据转向力的大小,估算了方向盘反作用转向力矩的强度。
作为车辆转弯或车道变换行为的主要主观评价变量,需要对在直线行驶,转弯,车道变换或严重的车道变换期间除了车辆速度之外的车辆路径进行主观评价。除此以外,车身姿态也是需要主观评价的。在该手册中,车身姿态相对于车辆移动方向定义。因此,车辆姿态代表瞬间相对于车辆路径的车辆行驶方向。
对于侧倾稳定性和侧翻稳定性,通过驾驶员身体感觉和视觉观察来感测车身运动。为了主观地评估舒适性,簧载和非簧载质量的振动运动被有意识的感知。此外,轮胎冲击震动在策略上和听觉上都得到了记录。
37.2.1 直线性
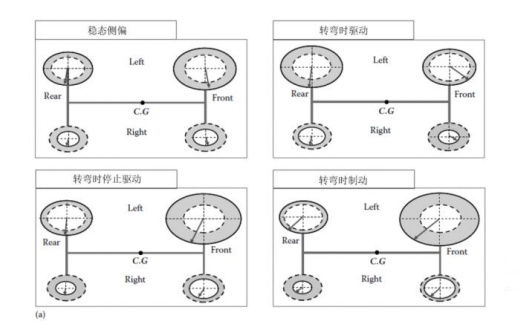
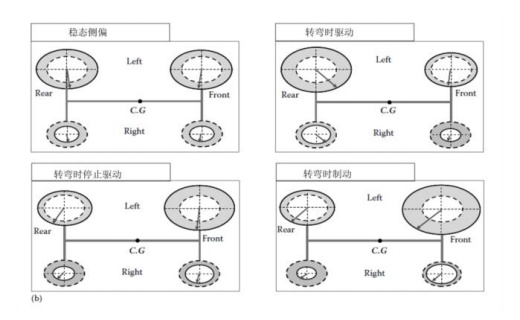
图37.6
在高摩擦道路(干燥表面)
上右转弯时车辆的所有轮胎力的摩擦椭圆
(a)前轮驱动;(b)后轮驱动
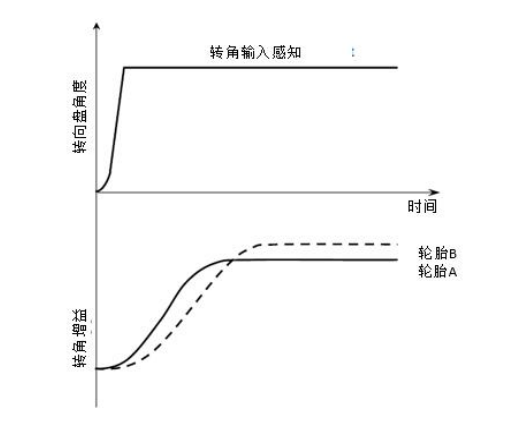
图37.7
在低摩擦道路(湿表面)
上右转弯时车辆的所有轮胎力的摩擦椭圆
(a)前轮驱动;(b)后轮驱动
无论在驾驶中受到何种干扰,都能使车辆保持直线行驶的能力通常被称为直线稳定性。这种命名方法只是传统上使用的,并不是它的物理定义。直线稳定性通常代表舒适性,而不是与安全性有关的较坏的情况。一般来说,它通过对其四个特征的感知来评估的,例如(a)残余牵引力,(b)直线行驶,(c)扭力转 向,以及(d)直线制动(参见图37.1)。
37.2.1.1 残余拉力
残余牵引力是由于残余转向扭矩引起的车辆的横向漂移特性。如图37.8所示,在恒定速度(通常为100公里/小时)的松开转向盘行驶约100米后,通过直线路径的横向漂移大小进行主观或客观评估。它确认了转向系统的合理设计,悬架的建立和轮胎的匹配,以及它们的制造均匀性。在长时间驾驶时,由于残余转向扭矩,残余牵引力的问题会使驾驶员感到疲劳。此外,松开方向盘行驶,在不好的情况下可能会导致事故。
37.2.1.2 直线行驶
如图37.9所示,直线行驶是一种在没有任何漂移和滑动下,转向和速度恒定时,车辆直线行驶的能力。它说明了转向和悬架系统对道路不平度和空气扰动的设计灵敏度。长时间驾驶也会使得驾驶员由于连续的转向校正而感到疲劳。
37.2.1.3 扭力转向
扭力转向是当固定转向直线行驶时,由于左右驱动轮之间的牵引力矩不平衡产生的车辆的横向漂移特性。如图37.10所示,通过车辆移动到相邻车道并被纠正回原先行驶车道的横向漂移量来进行主观评估。需要较小的横向漂移以获得更好的扭矩转向。
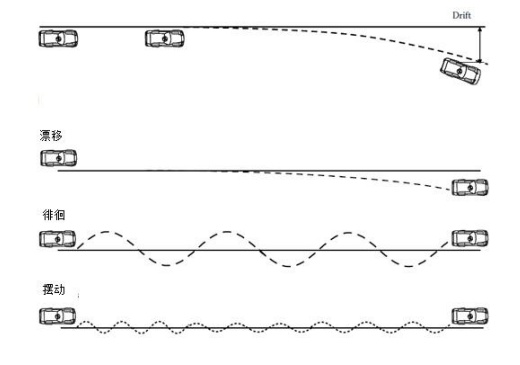
图37.8 残余牵引力 图37.9 直线行驶

图37.10 扭力转向
37.2.1.4 直线制动
直线制动是指车辆在没有发生姿态变化或路径偏移的情况下,快速制动到完全静止的能力。在完全制动期间通过手动转向控制车辆姿态和路径偏差,来主观地评价。良好的直线制动,不会出现车辆姿态和路径的偏移。
37.2.2 操纵性
实现操纵性的主要目标是(1)舒适性(2)灵敏度和(3)精确度。转向行为由八个特征的可操纵性表示,例如(a)中心感(b)转向响应(c)线性(d)转向准确性(e)转向角度(f)转向增益(g)转向力 矩和(h)回正性(参见图 37.1)。转向盘角度作为输入,通过转向盘力矩和车辆路径来主观评价汽车的操纵性能。根据转向输入的区域,操纵性能被显示在如图37.11上。中心感,线性度和转向增益是温和的瞬态转向特性。换句话说,所有其他性能都是不温和瞬态特征。
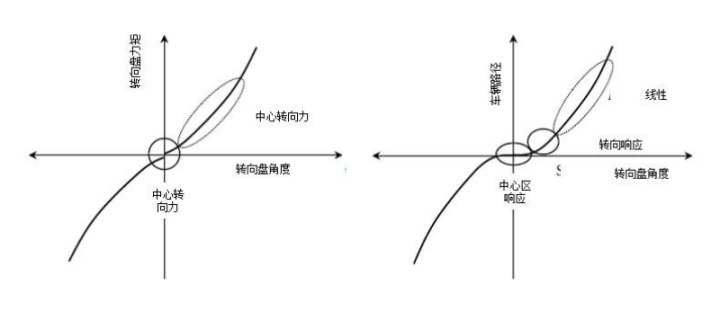
图 37.11 方向盘力矩和可操纵的车辆路径
37.2.2.1 中心感
中心感是在转向中间位置给与较为缓慢的输入下,驾驶员对(1)转向力矩和(2)车辆路径变化的综合感知。图37.12表明了中心感的转向力矩由(a)摩擦,(b)死区(c)顺应性和(d)转向反馈表示。车辆路径改变(或车辆转向)是通过转角角度被感知到来评价(a)死区和(b)转向增益,如图 37.13所示。中心感必须清晰和准确的;否则,驾驶员会感到紧张。由于中心转向的理想力矩大小取决于每个驾驶员,所以它是决定车辆性能的重要项目之一。
图37.12 中心区力矩 图37.13 中心区响应
转向摩擦是转向中间位置的初始转向力矩。原则上,需要最小的转向摩擦。但是,实际上并不容易实现。转向摩擦的改善可能导致例如转向灵敏度等的一些其他缺点。但是在大摩擦的情况下,它也会严重损害转向行为。
转向中心的小转向操作,死区被感知为由于除了摩擦之外没有转向力矩产生而引起的转向松动区域。通常不追求死区。否则,在转向中间位置带有死区的转向力就会不稳定。在死区非常大的情况下,它导致由于车辆路径的突然改变造成转向响应,从而产生过多的时间延迟。
通过对转向中心的连续且平稳的转向输入,用逐渐增大的转向运动来评估转向的顺应性。这种感知的 理想目标就像弹簧压缩的感觉。机械方面对这种问题的术语应该是“刚度”。但是“顺应性”可能另一方传统上用于表达这种压缩的主观感觉。
死区只是对于转向中间位置的微小转向操作下车辆无路径偏移的响应区域。当不存在死区时,总是需要对应于道路不平顺和风的变化来进行转向修正。在每个瞬间,它都会让驾驶员感到烦躁。一个大的死区会引起过多的转向响应时间延迟。因此会产生快速的车辆路径变化,从而引起驾驶员的紧张。
转向增益代表输出与输入比的比率。它是根据从转向中间位置产生的车辆初始路径变化的大小来评估的。根据驾驶员的偏好,它需要适当程度的车辆路径变化(或车辆转弯)的程度,也就是说,不能太大也不能太小。
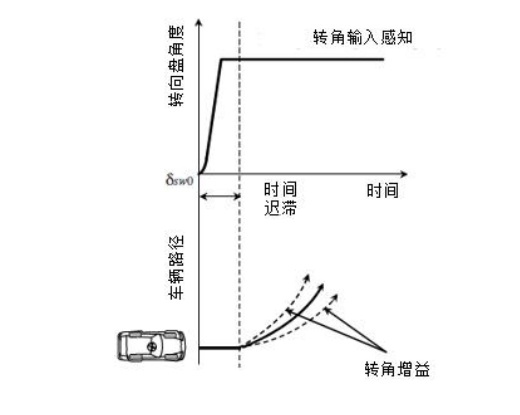
图37.14 非中心区响应
转向反馈是轮胎通过转向系统传递到转向盘上的反馈信息。在良好的转向反馈特性的情况下,驾驶员可以感觉到轮胎和路面之间的相互作用。然后,它可以帮助驾驶员预测即将到来的路况。在实践中,实现高水平的转向反馈特性并不容易。
37.2.2.2 转向响应
转向响应是在瞬态转向输入下,依赖于时间的车辆路径变化的主观测试。图37.14显示了车辆路径与转向盘角度的关系(a)时间延迟和(b)转向增益。时间延迟和转向增益都表示车辆路径及时变化的主观感受。转向响应是在直线和转向非中心区行驶时评价的。
时间延迟只是车辆第一次路径改变时的时间滞后。通常感觉时间延迟少更好。转向增益代表转向响应的主观测试,其初始的方向改变发生之后变化的有多快。它需要车辆路径变化有适当的速度,这取决于驾驶员的感受,并不是太快或太慢。
37.2.2.3 线性
线性是一种感知特性,是指在持续增加的方向盘转角输入下,对车辆轨迹线性特性的感知。图37.15显示了车辆路径的轮廓,用于描述转向增益的线性趋势。另外还可以看到车辆方向的任何变化。
良好的线性特性要求:在逐渐增加的方向盘输入下车辆路径也线性变化。此外,也需要恒定的车辆方向。换句话说,当存在任何车辆路径或姿态的干扰时,它会被评价很差。
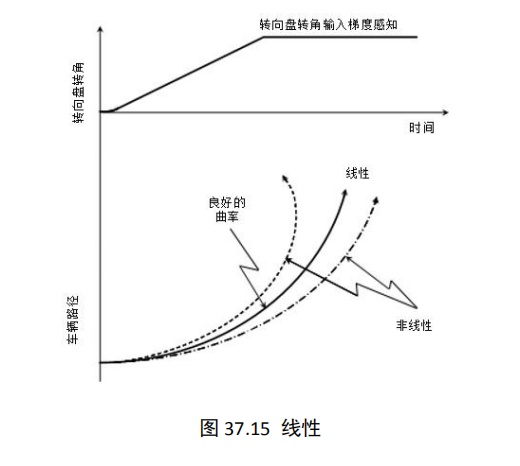
图37.15 线性
37.2.2.4 转向精度
转向精度是对车辆在一系列转向操纵下是否能准确地跟随预定路径的主观感受。在路径跟随时,控制车辆的容易程度也会影响主观评级。当操纵环形路径跟随时,它通常被评估为精度或线性的特征。此外,该指标还被用来判断车道变换和大幅度车道变换的准确性。
37.2.2.5 转向角
转向角是输出与输入比的主观评价。通过得到相同的路径所需要的转角来评价。通常,角度越小越好。例如,图37.16显示了配备两个不同轮胎的车辆的转角增益。轮胎A具有更快的转向响应,但需要更多的转向角来获得与轮胎 B相同的路径变化。在直线前进和转弯的非中心区来评价转向角。
图37.16 转向角

图37.17 转向力
37.2.2.6 转向增加
转向增加是在转弯时在抓地力极限上施加额外转向输入时产生的额外抓地力的感受。在这种情况下,主观评价一些路径变化。转向不足的车辆通常需要更好的转向附加特性才能回到拐角处的预定路径。一般来说,抓地力越多越好。
37.2.2.7 转向力
转向力是转向改变车辆路径方向所需的转向盘力矩的主观度量。如图 37.17所示,它不应太松或太紧,但是要有合适的舒适性。转向力通过直线前进和转弯时的非中心区来进行评估。
37.2.2.8 回正性能
回正性能是在施加轻微转向输入并立即释放之后(参见图37.18),转向盘自动返回其中间位置的速度和精度进行感知评价。它表示轮胎在轻微转向之后以及在结束转弯时使转向盘直接平稳地返回转向中间位置的能力。期望得到的是转向盘较低的振动和运动平滑性。
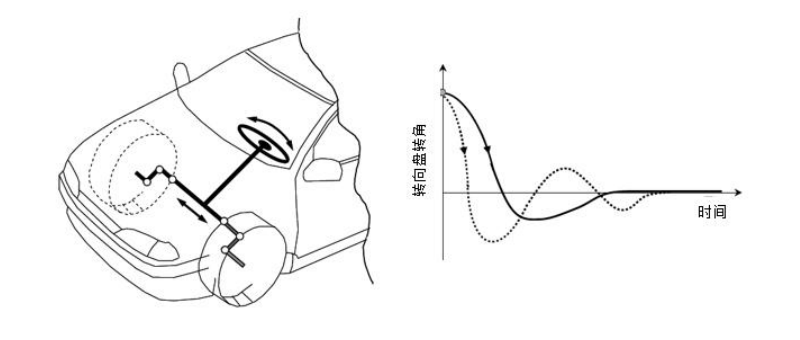
图37.18 回正性能
参考文献
[1] Segel, L., Theoretical Prediction and Experimental Substantiation of the Response of the Automobile to Steering Control, Automobile Division, the Institution of Mechanical Engineers, London, 1956.
[2] Whitcomb, D.W. and Milliken, W.F., Design Implications of a General Theory of Automobile Stability and Control, Automobile Division, the Institution of Mechanical Engineers, London, 1956.
[3] Pacejka, H.B., Simplified analysis of steady-state turning behaviour of motor vehicles. Part 1. Handling diagrams of simple systems, Vehicle System Dynamics 2, 161–172, 1973.
[4] Pacejka, H.B., Simplified analysis of steady-state turning behaviour of motor vehicles. Part 2. Stability of the steady-state turn, Vehicle System Dynamics 2, 173–183, 1973.
[5] Pacejka, H.B., Simplified analysis of steady-state turning behaviour of motor vehicles. Part 3. More elaborate systems, Vehicle System Dynamics 3, 185–204, 1973.
[6] Wong, J.Y., Theory of Ground Vehicles, 3rd edn., John Wiley & Sons, Inc., New York, 2001.
[7] Milliken, W.F. and Milliken, D.L., Race Car Vehicle Dynamics, SAE International, Pennsylvania, Inc., 1995.
[8] Gillespie, T.D., Fundamentals of Vehicle Dynamics, SAE International, Pennsylvania, Inc., 1992.
[9] Dixon, J.C., Tires, Suspension and Handling, SAE International, Pennsylvania, Inc., 1996.
[10] Griffin, M.J., Handbook of Human Vibration, Academic Press, London, U.K., 1990.
[11] ISO, Road vehicles—Vehicle dynamics and road-holding ability—Vocabulary, International Standard, ISO 8855:1991(E/F), 1991.
[12] ISO, Passenger cars—Steady-state circular driving behavior—Open-loop test procedure, International Standard, ISO 4138:1996(E), 1996.
[13] ISO, Road vehicles—Lateral transient response test methods—Open-loop test methods, International Standard, ISO 7401:2003(E), 2003.
[14] ISO, Road vehicles—Transient open-loop response test method with one period of sinusoidal input, International Standard, ISO/TR 8725:1998(E), 1998.
[15] ISO, Road vehicles—Transient open-loop response test method with pseudo-random steering input, International Standard, ISO/TR 8726, 1988.
[16] ISO, Passenger cars—Braking in a turn—Open-loop test procedure, International Standard, ISO 7975:1996(E), 1996.
[17] ISO, Passenger cars—Test track for a severe lane-change manoeuvre—Part 1: Double lane-change, International Standard, ISO 3888–1, 1999.
[18] ISO, Mechanical vibration and shock: evaluation of human exposure to whole-body vibration, International Standard, ISO 2631-1:1997, 1997.
[19] Kruger, H.P., Neukum, A., and Schuller, J., A workload approach to the evaluation of vehicle handling characteristics, Society of Automotive Engineers, No. 2000-01-0170, 2000.
[20] Stephens, P. and Kohn, H.J., Influence of the tyre on subjective handling at the limit, In Vehicle Performance—Understanding Human Monitoring and Assessment, pp. 177–195, 1999.
[21] Godthelp, A.P., de Vos, J., and Käppler, W.D., Subjective and objective assessment of manual, supported, and automated vehicle control, In Vehicle Performance—Understanding Human Monitoring and Assessment, pp. 97–120, 1999.
[22] Crolla, D.A. and Chen, D.C., Vehicle handling assessment using a combined subjective-objective approach, Society of Automotive Engineers, No. 980226, 1998.
[23] Norman, K., Objective evaluation of on-center handling performance, Society of Automotive Engineers, No. 840069, 1984.
[24] Farrer, D.G., An objective measurement techniques for the quantification of on-centre handling quality, Society of Automotive Engineers, No. 930827, 1993.
[25] Salaani, M.K., Experimental steering feel performance measures, Society of Automotive Engineers, No. 2004-01-1074, 2004.Lee, S.K. and White, P.R., Application of wavelet analysis to the impact harshness of a vehicle, Proceedings of the Institution of Mechanical Engineers 214(11), 1331–1338, 2000.
[26] Walter, S.L., Quantitative measurement of handling characteristics of tires and/or vehicle/tire combinations, U. S. Patent No. 4969212, 1990.
[27] Gauthier, P.N. and Ludlow, W., System and method for testing deflated tire handling, U. S. Patent No. 6580980B1, 2003.
[28] Gim, G. and Kim, J.,Objectification of subjective assessment on transient steer characteristic, FISITA, No. F2004F071, 2004.
[29] Wood, J.J. and Leatherwood, J.D., A new ride quality meter, Society of Automotive Engineers, No. 850981, 1985.
[30] Park, W.H. and Wambold, J.C., Objective ride quality measurement, Society of Automotive Engineers, No. 760360, 1976.
[31] Mehta, N.C., Subjective and objective ride evaluations of commercial vehicles, Society of Automotive Engineers, No. 810046, 1981.
[32] Norsworthy, T.H., The correlation of objective ride measures to subjective jury evaluations of class 8 COE vehicles, Society of Automotive Engineers, No. 850985, 1985.
[33] Kudritzki, D.K., Analysis of ride comfort considering driver assessment, In Vehicle Performance, J.P. Pauwelussen (ed.), pp. 196–217, 1999.
[34] Hassan, R. and McManus, K., Heavy vehicle ride and driver comfort, Society of Automotive Engineers,No. 2001-01-0386, 2001.
[35] Strong, J.R., Statistical methods for evaluating truck ride quality measures, Society of Automotive Engineers, No. 850986, 1985.
[36] Ushijima, T. and Kumakawa, S., Objective harshness evaluation, Society of Automotive Engineers, No. 951374, 1995.
[37] Lee, S.K. and White, P.R., Application of wavelet analysis to the impact harshness of a vehicle, Proceedings of the Institution of Mechanical Engineers 214(11), 1331–1338, 2000.
[38] Kennedy, D.C., Patten, W.N., and Ratliff, R.T., Impact Harshness of Small Interstate Bumps: Objective and Subjective Testing, DSC-Vol. 52, Advanced Automotive Technologies, ASME, New York, 1993.
[39] Amman, S., Gu, P., Mouch, T., Meier, R., and Greenburg, J., Sound and vibration contribution to the perception of impact harshness, Society of Automotive Engineers, No. 2005-01-1499, 2005.
[40] Gim, G. and Kim, J., Vehicle dynamics of MIRA, Hankook tire, Technical Report No. VD-R98-2, 1998.
[41] Gim, G. and Kim, J., Subjective assessment of TÜV for dry handling/stability, Hankook tire, Technical Report No. VD-R98-3, 1998.
[42] Gim, G., Subjective assessment of Ford SVC for dry handling/stability, Hankook tire, Technical Report No. VD-R98-6, 1998.
[43] Gim, G., Kim, J., Oh, S., and Kim, J., Modern vehicle dynamics: Subjective test of handling, Hankook tire, Technical Report No. VD-R01-01, 2004.
来源:节选自《Road and Off-Road Vehicle》







最新资讯
-
Rivian与MAE合作定制电动车测试设备安装项
2025-04-10 14:41
-
重型商用车辆和客车的动力学——操纵性
2025-04-10 14:40
-
新能源汽车VCU、BMS、MCU控制器图解
2025-04-10 14:39
-
陶琳回应电动车辐射高:特斯拉辐射值远低于
2025-04-10 13:14
-
nCode2025版本发布说明
2025-04-10 13:12
