




 广告
广告





















































底盘开发之CAE -整车虚拟仿真
2021-09-13 21:53:07· 来源:Vehicle 作者:Pirate Jack

基于车辆作为一个系统的结构表示,以下传输方程可用于各种工作范围和激励:
传递矩阵G(s)包含关于系统输入和输出之间传递路径的信息,因此可用于描述系统在目标操作条件下的传递行为。传递矩阵为分析车辆的操纵和动态行为奠定了基础。
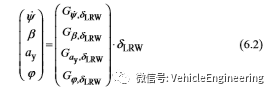
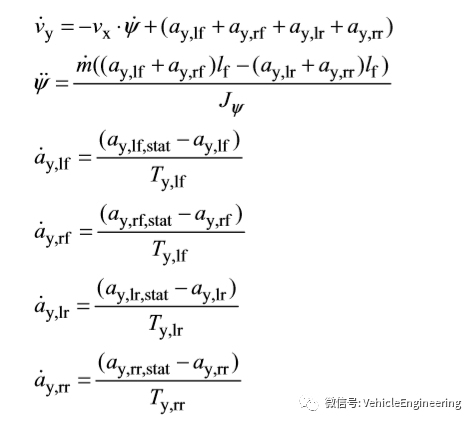
下面几段着重介绍横向动力学。横向动力学研究中最重要的输出值是横摆角速度(横摆角速度)ψ、车辆侧滑角β、横向加速度av和侧倾角Ψ。系统由方向盘转角输入δLRW激励。因此,用于描述系统行为的简化传递方程变为:
车辆的横向动力学行为随车辆的速度和横向加速度而变化。因此,横向动力行为域被定义为由这两个轴组成的图。在此范围内,选择操作点,以便研究整个线性操作条件范围(图6-37)。
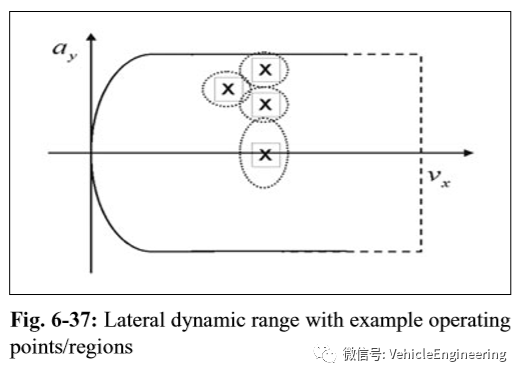
对于这些操作点中的每一个,可以使用二阶线性传递函数来描述四个输入和输出路径的传递行为。这些传递函数表示系统在选定操作点的小信号行为。为了确定特定工作点的小信号行为,系统在选定的工作点内和周围受到激励。对激励信号的要求部分取决于工作点的线性极限,以及由此产生的传输行为的预期相关频率范围。
随机或正弦输入信号最适合用作测试信号。这些测试信号叠加在选定操作点所需的固定方向盘角度上。正弦扫频信号在车辆试验中得到了很好的应用。
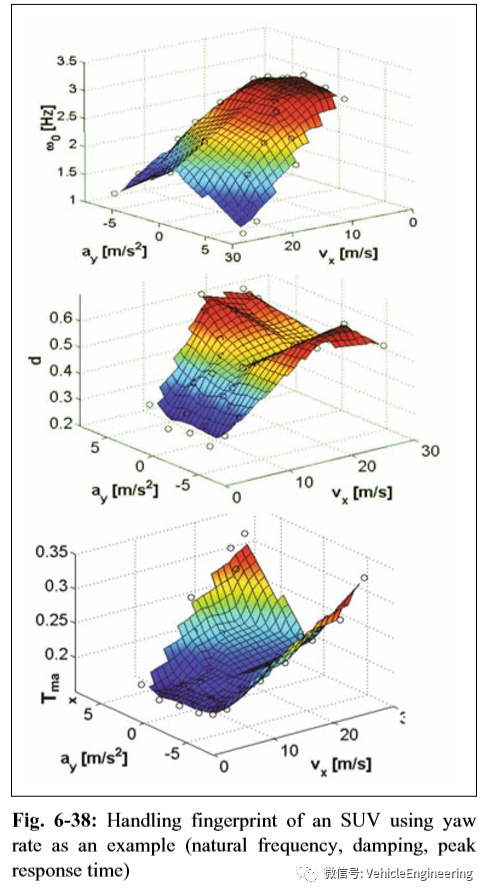
识别方法用于根据记录的频率响应值确定二阶传递函数。然后,这些传递函数可用于计算表征车辆操纵性的各种动态参数。这些特征值可以在横向动态范围内绘制,即作为车速和横向加速度的函数,以获得车辆的操纵指纹(图6-38)。
除了车辆操纵性的标准评估外,本文所述的指纹法为工程师提供了描述和评估整个横向动态特性范围内的操纵性的可能性,包括车辆附着力的物理极限。
指纹法不仅可以用于伴随客观和比较的车辆评估,还可以作为车辆开发过程中处理行为的连续描述,从最初的需求规范开始
最终确认。虽然指纹识别方法是针对横向动态领域发展起来的,但也可以扩展到纵向和纵向动态领域。有关指纹方法的详细说明,请参见[21]。
用控制系统方法描述弹性运动学
在确定新悬架系统的弹性运动特性时,采用基于新型模型的控制系统设计方法来描述弹性运动效应。该弹性运动学模型的基础是根据[22]中的转向模型,添加弹性运动学和运动前束差角。
转向模型的输入值对应于已知车型的不同条件值和输出值。转向模型的输出值是车辆模型的输入值。侧向力引起的弹性运动前束角差(由转向模型输出)可以作为侧向力对车轮切割角影响的反馈函数集成到车辆模型中(图6-39)。
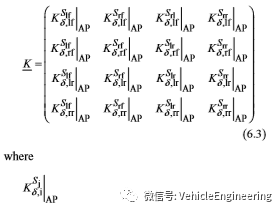
侧向力引起的二次效应用以下反馈矩阵表示:
是第i个车轮前束角变化的量度,用于测量在所选工作点AP处第j个车轮上横向力的变化。反馈矩阵的各个分量对应于各种前束力-位移曲线Y Y-XXK G=-的负梯度Y XG。负号源于前束差角(作为正值添加到车轮切割角中)的定义,源于输出反馈(要求输入负反馈值)的定义。预滤波矩阵

主要考虑转向比iL。作为描述弹性运动特性的仿真模型,使用包括轮胎磨合行为的线性化车辆模型来描述横向和偏航运动:
使用极点规范[23]确定输出反馈的直接方法用于指定反馈矩阵。这种方法允许在合成轴系时考虑许多不同的特性。该模型提供的可能性在[21]中描述。
设计过程应在几个不同的操作点进行。结果值是趾力-位移曲线的梯度。通过对轮胎力进行积分,可以将其转化为力-位移曲线。这些力-位移曲线不一定能用被动系统来实现。因此,该设计过程非常适合确定主动轴系统的要求。实现所需的力-位移曲线是车轴开发人员的责任。
目标趾力-位移曲线的形状是以客观准则的形式根据操纵要求确定的。这些准则被转化为控制系统准则,即极点和零点。参考车辆动态特性的“操纵指纹”描述可作为新轴系开发和优化的基础。新车轴所需操纵性能的极点和零点可直接从参考车轴的传递函数中获取。







最新资讯
-
标准解读丨ISO 21111 《道路车辆车载以太网
2025-03-31 19:15
-
清研精准兆瓦级充放电测试设备——重新定义
2025-03-31 19:13
-
强强联合:imc FAMOS内嵌Python接口,提高
2025-03-31 19:12
-
汽车动力电池与发动机系列标准宣贯会在武汉
2025-03-31 16:08
-
氢内燃机2.0-西南研究院(SwRI)启动第二阶
2025-03-31 16:06
