




 广告
广告





















































一种面向自动驾驶汽车定位的基于深度神经网络的大尺度建图方法
2021-09-14 21:28:08· 来源:同济智能汽车研究所

编者按:占用栅格地图是无人驾驶汽车的定位和规划模块所需的重要输入。深度神经网络亦是近年来智能驾驶研究的一大热点。所推荐的这篇文章借助深度神经网络生成满
编者按:占用栅格地图是无人驾驶汽车的定位和规划模块所需的重要输入。深度神经网络亦是近年来智能驾驶研究的一大热点。所推荐的这篇文章借助深度神经网络生成满足无人驾驶汽车需求的占用栅格地图,并提供丰富的视频材料证明了所提出方法能被成功用于实车无人驾驶。
本文译自:《A Large-Scale Mapping Method based on Deep Neural Networks Applied to Self-Driving Car Localization》
文章来源:2020 International Joint Conference on Neural Networks (IJCNN), 2020
作者:Vinicius B. Cardoso, André Seidel Oliveira, Avelino Forechi, Pedro Azevedo, Filipe Mutz
原文链接:https://ieeexplore.ieee.org/abstract/document/9207449
摘要:本文提出了一种使用名为NeuralMapper的深度神经网络实时创建自动驾驶汽车所需占用地图的新方法。NeuralMapper接收LiDAR传感器数据作为输入,并生成汽车周围的占用栅格地图作为输出。NeuralMapper推算每个栅格地图单元格作为以下三个类别之一的概率:占用、空闲和未知。该系统在两个数据集上进行了测试,平均准确率分别为76.48%和73.81%。本文还使用自动驾驶汽车评估了所提出方法用于定位的效果,大多数定位位姿误差小于0.20m,RMSE 为0.28m,这与其他文献中使用其他栅格地图建立方法的结果接近。
关键词:自动驾驶汽车,建图,深度神经网络
1 引言
在过去的二十年里,自动驾驶汽车取得了长足的进步。2004年,美国国防高级研究计划局(DARPA)发起了第一次自动驾驶汽车竞赛,目标是在没有人为干预的情况下穿越莫哈韦沙漠[1]——在这场比赛中,没有一个参赛者实现了目标。在第一次尝试之后,DARPA在2005年和2007年推动了另外两项竞赛,分别有5辆和6辆汽车完成了提出的挑战。这些事件极大促进了自动驾驶汽车的发展,推动了自动驾驶汽车在今天成为现实。谷歌、沃尔沃和优步等公司正在全球多个城市进行试验,向公众提供自动驾驶服务。
尽管在该领域已经取得了巨大进步,但今天的自动驾驶汽车仍然无法准确应对日常城市交通中遇到的所有情况和天气条件。出于这个原因,世界各地的大学和研究中心都在进行研究,以改进这项技术并提高自动驾驶汽车的自主水平。
IARA(智能自主机器人汽车)自动驾驶汽车,如图2所示,自2009年以来一直由圣埃斯皮里托联邦大学(Universidade Federal do Espírito Santo – UFES, Brazil)的高性能计算实验室(Laboratório de Computação de Alto Desempenho - LCAD)开发。IARA以福特Escape Hybrid为基础,采用了各种传感器和处理单元。其自主系统遵循自动驾驶汽车的典型架构[2],由多个子系统组成,其中包括建图器[3]、定位器[4]、动态障碍物跟踪器[5]、交通标志检测器[6][7]、路线规划器、路径规划器、行为选择器、运动规划器[8]、避障器[9]和控制器[10]等。IARA 使用的地图由LiDAR点云通过在线和离线建图方式生成。考虑到LiDAR测量值可能因环境条件(例如下雨、落叶、反射面不平整)或传感器本身噪声引起的测量误差而不准确,因此建图系统不能完全依赖LiDAR直接测量的距离和位置。因此,对于建图,有必要使用考虑所有这些不确定性的技术来尝试尽可能多地过滤传感器误差。
目前IARA中使用的算法旨在通过LiDAR传感器每次新测量值来更新区块占用的概率。为此,基于贝叶斯滤波器的占用栅格地图(OGM)算法[3]被应用于逐渐增加或减少栅格地图每个单元格的占用置信度。然而,这种方法对于远距离的目标不是很准确。此外,因为所使用的OGM算法没有考虑空间不连续性,有必要使用算法来推断任何传感器均不能观测到的单元格的占用情况。此外,建图算法需要处理数千行代码中的几种特殊情况,以找到正确提取传感器测量数据特征的最佳方法[3]。
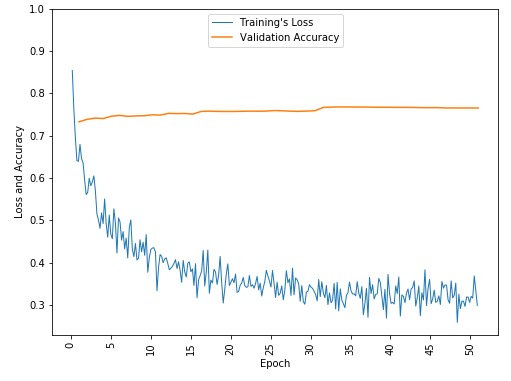
图1 NeuralMapper架构概述。左侧的输入显示了LiDAR点云原始数据。NeuralMapper将地面上的原始数据投影为一组2D统计图。统计图经过编码器、Context Module和解码器进行处理,以生成占用栅格地图作为输出。在地图中,未知单元格为蓝色,空闲单元格为白色,占用单元格为黑色。
受IARA建图方法的这些局限性以及深度学习的进步的启发,本文提出了一种基于深度神经网络(DNN)的占用栅格地图实时推断新方法,名为NeuralMapper。NeuralMapper是IARA自主软件架构的一个子系统,它接收LiDAR传感器数据作为输入,并生成汽车周围的占用栅格地图作为输出。在NeuralMapper中,每个LiDAR点云在LiDAR参考系中从球面坐标转换为二维笛卡尔坐标。然后,使用这些数据的统计数据从2D LiDAR数据中计算出五个矩阵(NeuralMapper的输入数据遵循Caltagirone等人[11]采用的数据形式)。这五个矩阵组合成一个五通道张量,用作NeuralMapper DNN的输入。所考虑的统计数据是落入汽车周围栅格地图的一个单元格的激光射线的数量,以及单元格中的被射线所击中的障碍物高度的最大值、最小值、平均值和标准偏差。
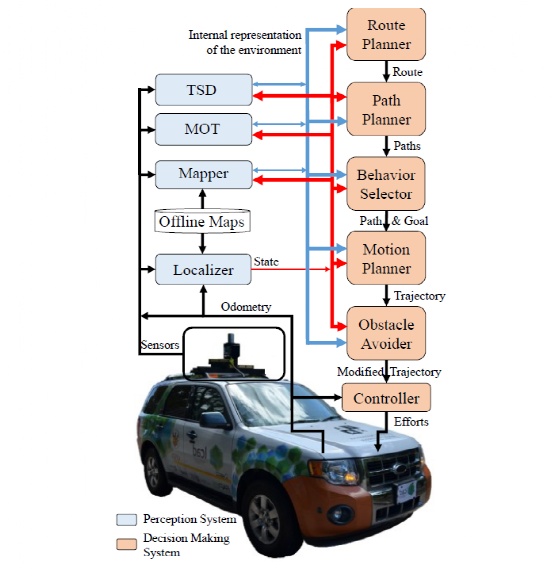
图2 自动驾驶汽车典型架构总览[2]。
TSD:交通信号检测 MOT:移动对象跟踪。
网络的输出是一个占用栅格地图,它具有与每个栅格地图单元三个可能类别中每一个的相应概率:未知、空闲或已占用。该地图被转换至汽车参考系并发布到其他IARA的子系统(见图2)。NeuralMapper的框图如图1所示。
本文使用IARA采集实车数据评估了NeuralMapper。该系统使用IARA传感器数据构建的两个数据集进行了测试,第一个数据集的平均准确率为76.48%,第二个数据集的平均准确率为73.81%。本文还通过IARA评估了使用NeuralMapper地图进行定位,大多数IARA的定位误差小于0.2m,RMSE为0.28m。这些结果与其他文献中使用其他栅格地图建立方法的结果接近。
以下部分将通过文献综述和借助IARA的实车实验来评估该方法的能力。



编辑推荐




最新资讯
-
大卓智能端到端直播实测,16公里复杂路段挑
2025-04-25 17:16
-
《汽车轮胎耐撞击性能试验方法-车辆法》等
2025-04-25 11:45
-
“真实”而精确的能量流测试:电动汽车能效
2025-04-25 11:44
-
GRAS助力中国高校科研升级
2025-04-25 10:25
-
梅赛德斯-AMG使用VI-CarRealTime开发其控制
2025-04-25 10:21
