




 广告
广告





















































基于非线性扰动观测的商用车ESC自适应滑模控制研究
2021-09-15 01:15:30· 来源:汽车制动之家

3 硬件在环试验验证
为验证算法的有效性,搭建如图3所示电控气压制动系统构型硬件在环(hardware in loop,HIL)试验台。HIL试验台具体方案如图5所示,图6为HIL试验台实物图。HIL试验台由气压制动部分、实时系统和电控部分组成。气压制动部分主要有:双通道轴调节器、制动踏板总成、制动气室、干燥器、空气压缩机及气压管路。实时系统部分包括:dSPACE Simulator系统和上位机。电控部分包括:压力传感器、驱动板和供电电源。在上位机中的MATLAB中分别搭建上层NDOB-ADSMC控制策略、底层单神经元PID控制策略模型,在TruckSim中搭建高精度整车模型并选择试验工况。为对比NDOB-ADSMC的有效性和控制精度,同时在相同条件下,在MATLAB中搭建传统SMC控制策略模型。在MATLAB中对控制策略模型进行编译,将生成的sdf文件下载到dSPACE Simulator中即可进行试验。本文中分别选择在不同车速和不同路面附着系数下的两种双移线工况对算法进行电控气压制动系统硬件在环试验验证,硬件在环试验中的车辆参数如表2所示。
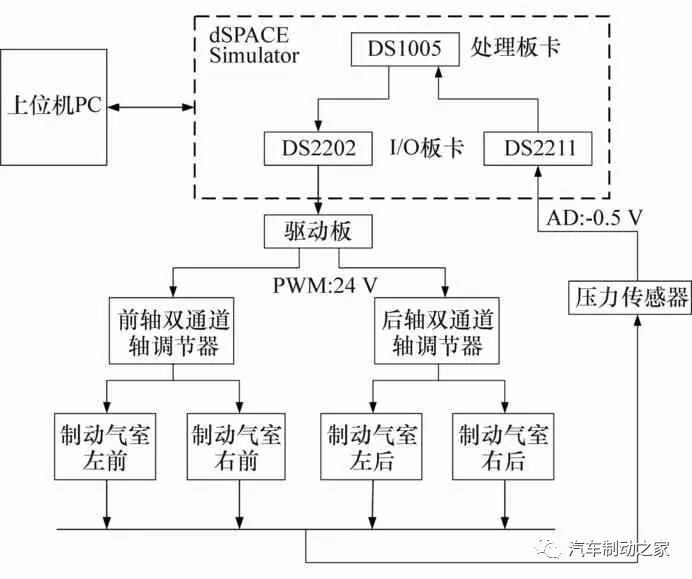
图5 HIL试验台方案图

图6 电控气压硬件在环试验台
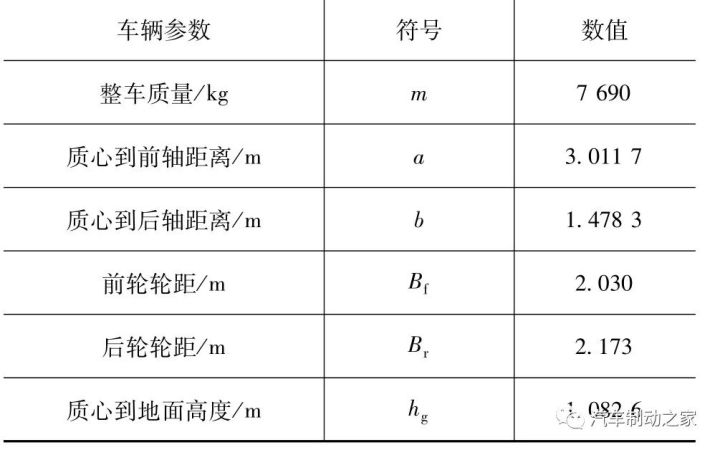
表2 车辆参数
3.1 高速附着路面双移线车速
在TruckSim中选择双移线工况,设置车速为108 km/h,路面附着系数为0.6,图7~图9为试验相关曲线。
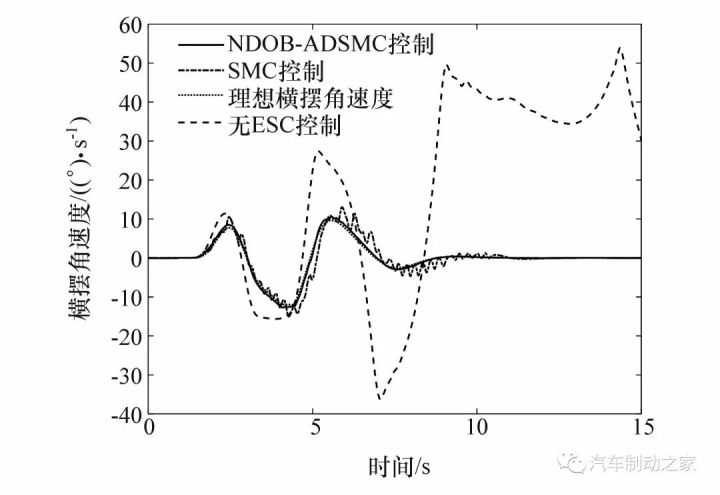
图7 横摆角速度
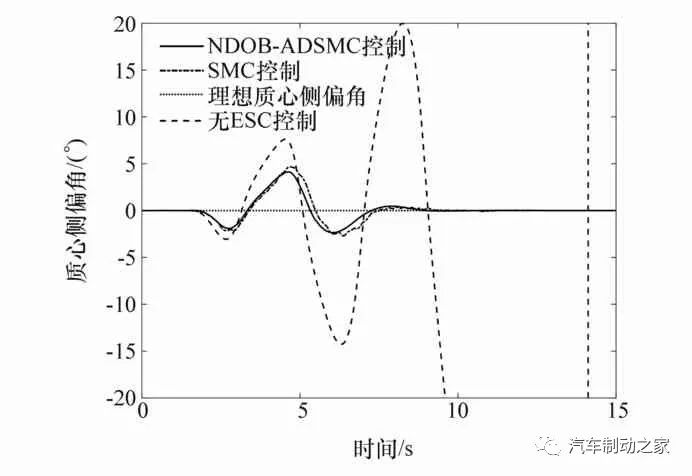
图8 质心侧偏角
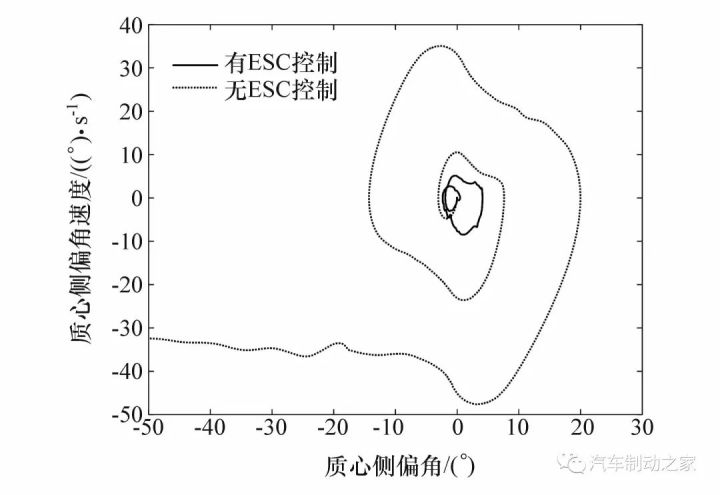
图9 质心侧偏角相平面图
由图7和图8可知,车辆在NDOB-ADSMC算法和SMC算法控制下,横摆角速度和质心侧偏角都能跟随理想横摆角速度和质心侧偏角,但在NDOBADSMC算法控制下,横摆角速度和质心侧偏角跟随过程更加平稳,跟随效果更好。车辆没有ESC控制时,横摆角速度和质心侧偏角幅值随着车辆的行驶过程不断变大,车辆在经过双移线路段末端附近的时候,横摆角速度和质心侧偏角完全发散,此时车辆处于失稳状态。结合图9相平面图可知,没有ESC控制的时候,质心侧偏角相平面曲线始终无法收敛到稳定值。
3.2 低附着双移线工况
在TruckSim中选择双移线工况,设置车速为72 km/h,路面附着系数为0.3,图10~图12为试验相关曲线。
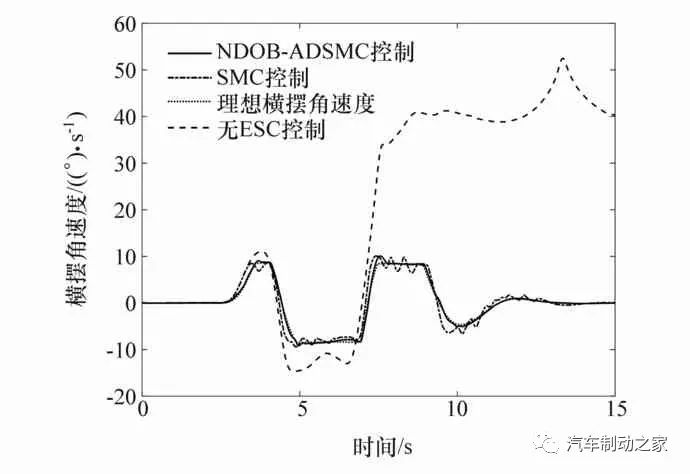
图10 横摆角速度
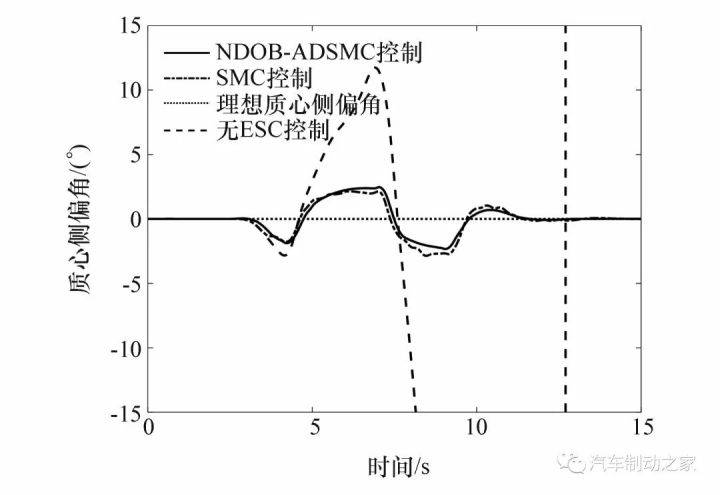
图11 质心侧偏角
由图10和图11可知,车辆在NDOB-ADSMC算法和SMC算法控制下,横摆角速度和质心侧偏角都能跟随理想的横摆角速度和质心侧偏角,但是在NDOB-ADSMC算法控制下的,横摆角速度和质心侧偏角的跟随过程更加平稳,跟随效果更好。车辆没有ESC控制时,横摆角速度和质心侧偏角幅值随着车辆的行驶过程不断变大,车辆在行驶双移线路段大约一半的时候,横摆角速度和质心侧偏角完全发散,此时车辆处于完全失稳状态。结合图12质心相平面图也可知,没有ESC控制的时候,质心侧偏角相平面曲线始终无法收敛到稳定值。
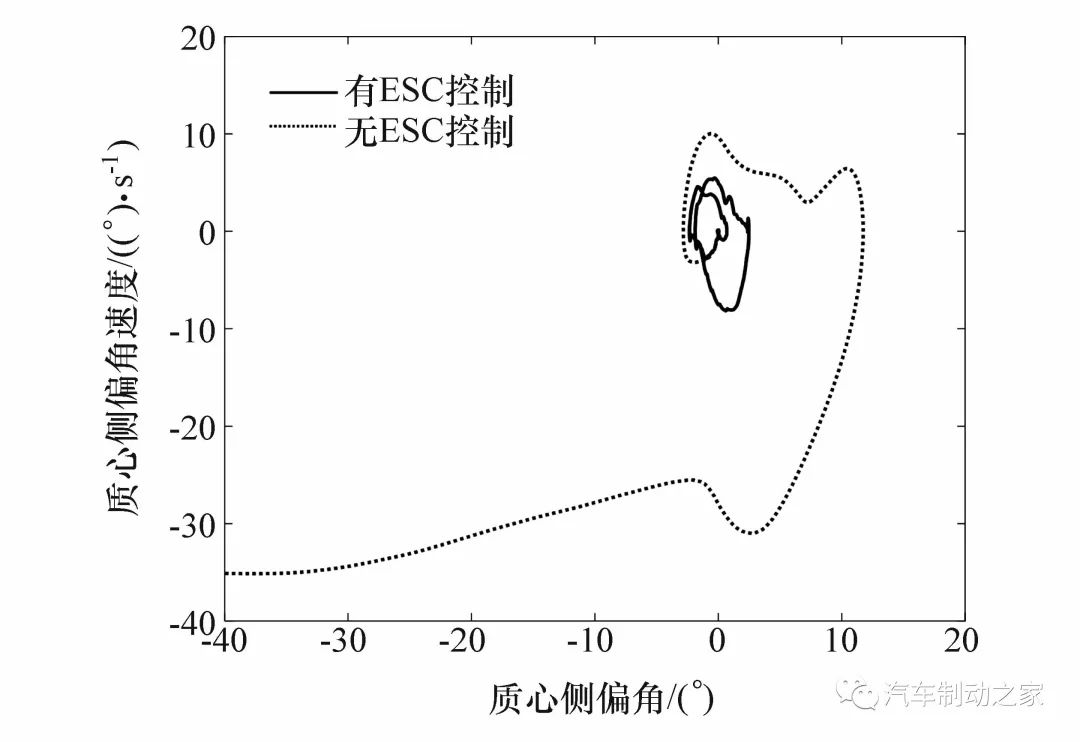
图12 质心侧偏角相平面图
4 结论
本文中针对商用车ESC控制中实际车辆存在各种扰动、难以建立精确车辆模型、传统滑模控制中抖振大等问题,提出了NDOB-ADSMC算法。首先,利用NDOB对非线性扰动进行观测,对NDOB进行Lyapunov稳定性证明,结果表明了NDOB在有限时间内的渐进稳定性,且能有效减小滑模控制的抖振;然后,为更进一步优化滑模控制器的效果,简化参数调节过程,采用RBF神经网络对滑模控制器的关键参数k进行自适应调节;最后,在硬件在环试验台上对控制算法进行验证,试验结果表明,NDOB-ADSMC算法与传统的SMC算法相比,NDOB-ADSMC算法与试验的理想值有更好的一致性,具有更高的精度和抗干扰性,NDOB-ADSMC算法和SMC算法都能满足商用车ESC控制的需求,但NDOB-ADSMC算法的控制效果更好一些。为进一步优化算法在工程中的实际应用效果,后续应该在硬件在环试验台和实车上进行多种工况试验。



编辑推荐




最新资讯
-
大卓智能端到端直播实测,16公里复杂路段挑
2025-04-25 17:16
-
《汽车轮胎耐撞击性能试验方法-车辆法》等
2025-04-25 11:45
-
“真实”而精确的能量流测试:电动汽车能效
2025-04-25 11:44
-
GRAS助力中国高校科研升级
2025-04-25 10:25
-
梅赛德斯-AMG使用VI-CarRealTime开发其控制
2025-04-25 10:21
