




 广告
广告





















































自动驾驶摄像头的基本工作原理
2021-09-15 15:15:48· 来源:自动驾驶攻城狮 作者:青骥子

对比Radar、Lidar、Sonar来讲,Camera最接近人眼识别原理,在自动驾驶传感器中担任重要角色,尤其自动驾驶领头羊特斯拉力推纯视觉方案,行业内纷纷加注摄像头,
对比Radar、Lidar、Sonar来讲,Camera最接近人眼识别原理,在自动驾驶传感器中担任重要角色,尤其自动驾驶领头羊特斯拉力推纯视觉方案,行业内纷纷加注摄像头,摄像头的平均单车使用量逐年上升。
本文就来挖一挖自动驾驶摄像头的基本知识。
摄像头分类:
按照安装位置不同可分为,前视摄像头、后视摄像头、侧面摄像头、全景摄像头、DMS摄像头等
按照镜头数可分为单目、双目、三目等
按照FOV角度可分为广角、鱼眼摄像头等
摄像头的组成:Lens(镜头)+Image Sensor(CMOS/CCD)+电源PCB+壳体/支架/密封胶水,还有些摄像头是集成ISP(图像信号处理器Image Signal Processor)的,不过有些不带ISP,如下图所示一个带ISP一个不带。
基本工作原理:
Lens负责光学取景,将物理世界由透镜投射到Image Sensor,产生电压差,将电压差通过AD转换后给ISP进行灰度补偿、色彩差值、平滑处理、色彩校正等,然后将图像传递从Raw DATA格式转换成RGB格式或者是YUV格式输出到相机外部(控制器),控制器通过神经网络算法来处理摄像头感知数据,从而完成视觉的感知和识别结果输出。

关键性能参数
1-像素Resolution,越大越高清
2-分辨率,分辨率使用于度量图像内数据量多少的一个参数,表示成dpi(每英寸点或像素数),基本由Iamge Sensor决定,Image sensor尺寸越大像素越多,图像越清晰
3-色域,RGB24和I420(YUV)两种图像格式最为常用
4-FOV,可支持的视角范围
5-帧率,即每秒显示的图像数
6-Dynamic Range

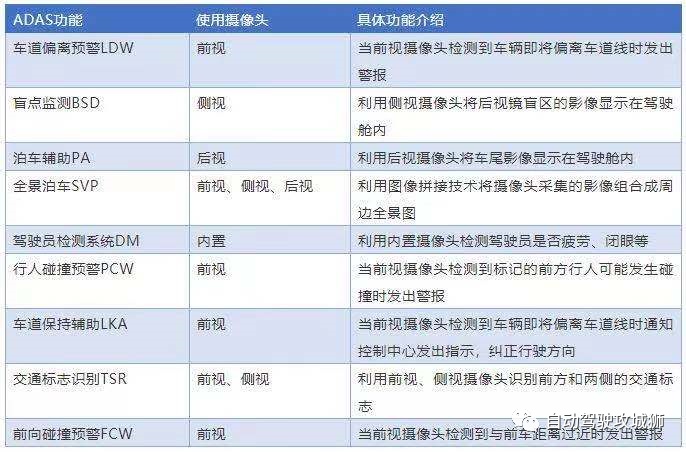
自动驾驶功能的摄像头使用分配
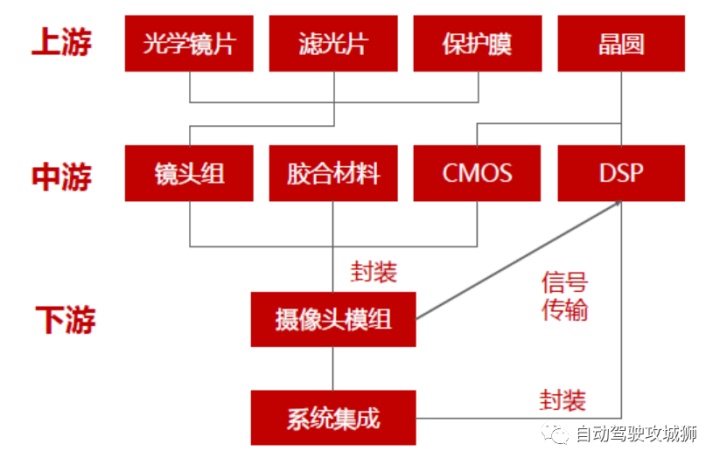
摄像头的产业链
- 下一篇:性能更强——电动汽车材料创新技术解析
- 上一篇:车载以太网介绍



编辑推荐




最新资讯
-
大卓智能端到端直播实测,16公里复杂路段挑
2025-04-25 17:16
-
《汽车轮胎耐撞击性能试验方法-车辆法》等
2025-04-25 11:45
-
“真实”而精确的能量流测试:电动汽车能效
2025-04-25 11:44
-
GRAS助力中国高校科研升级
2025-04-25 10:25
-
梅赛德斯-AMG使用VI-CarRealTime开发其控制
2025-04-25 10:21
