




 广告
广告





















































一文读懂自动驾驶数据闭环
2021-09-21 18:17:01· 来源:智驾最前沿

注意最近的一些新方法:
-
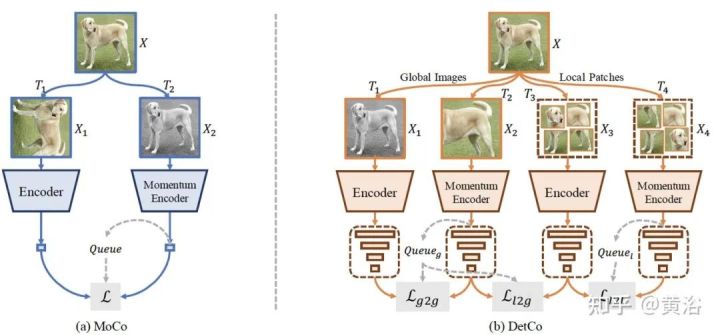
“DetCo: Unsupervised Contrastive Learning for Object Detection“
-
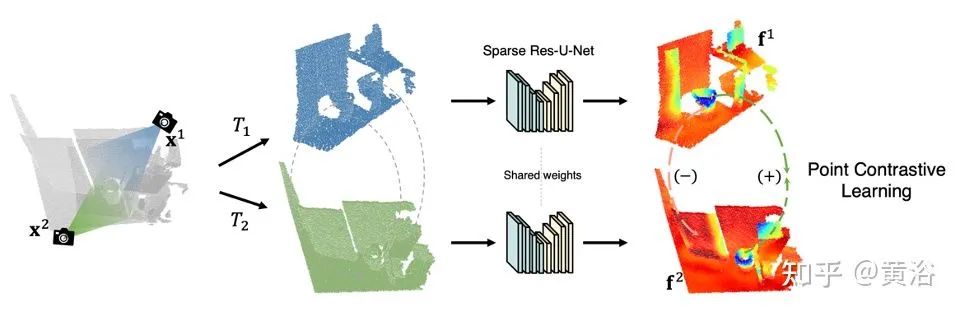
“PointContrast: Unsupervised Pre-training for 3D Point Cloud Understanding“
-
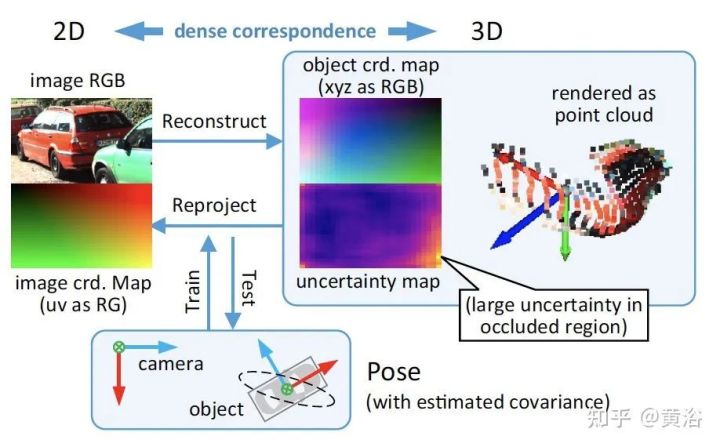
“MonoRUn: Monocular 3D Object Detection by Reconstruction and Uncertainty Propagation“
-
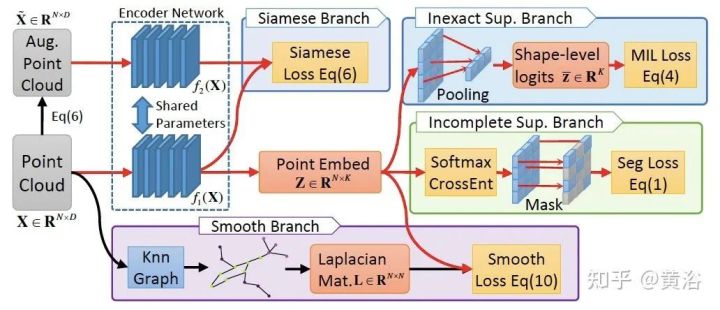
“Weakly Supervised Semantic Point Cloud Segmentation: Towards 10x Fewer Labels“
8)少样本/零样本学习
零样本学习(Zero-shot learning,ZSL)旨在识别在训练期间可能未见过实例的目标。虽然大多数ZSL方法都使用判别性损失(discriminative losses)进行学习,但少数生成模型(generative models)将每个类别表示为概率分布。
对于未见类(unseen classes),ZSL除了无法访问其视觉或辅助信息的inductive设置之外,transductive方法无需访问标签信息,直接用已见类(seen classes)和未见类一起的视觉或语义信息。
ZSL属于迁移学习(TL),源特征空间为训练实例,目标特征空间为测试实例,二者特征空间一样。但对于已见类和未见类,标签空间是不同的。
为了从有限的监督信息中学习,一个新的机器学习方向称为少样本学习 (Few-Shot Learning ,FSL)。基于如何使用先验知识,FSL可分为三个类:1)用数据先验知识来增强监督经验,2)通过模型先验知识约束假设空间,和3)用算法先验知识改变假设空间中最佳参数的搜索方式。
FSL 可以是监督学习、半监督学习和强化学习(RL),取决于除了有限的监督信息之外还有哪些数据可用。许多 FSL 方法是元学习(meta learning)方法,以此作为先验知识。
最近的一些实例方法:
-
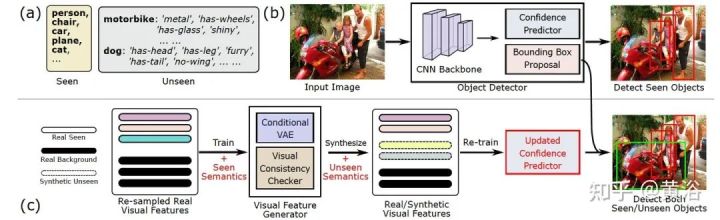
“Don’t Even Look Once: Synthesizing Features for Zero-Shot Detection“
-
“Zero-Shot Semantic Segmentation“

-
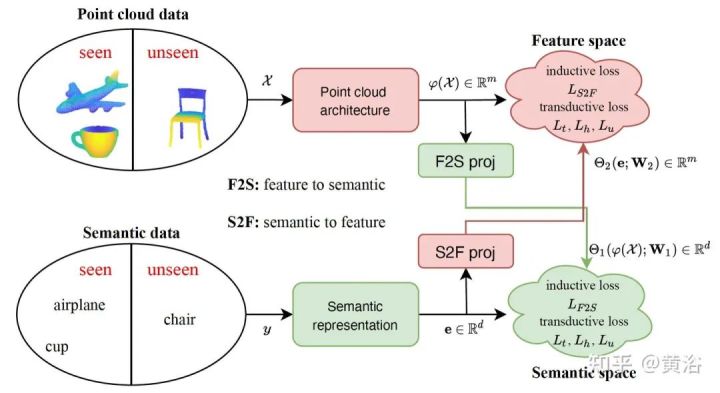
“Zero-Shot Learning on 3D Point Cloud Objects and Beyond“
-
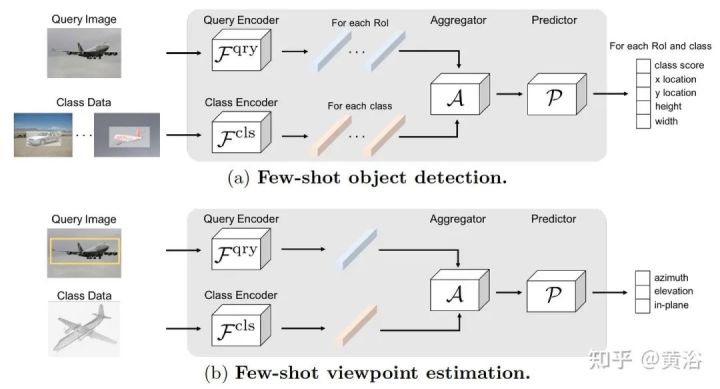
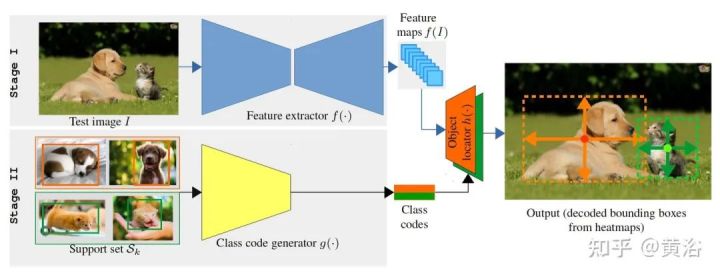
“Few-Shot Object Detection and Viewpoint Estimation for Objects in the Wild“
-
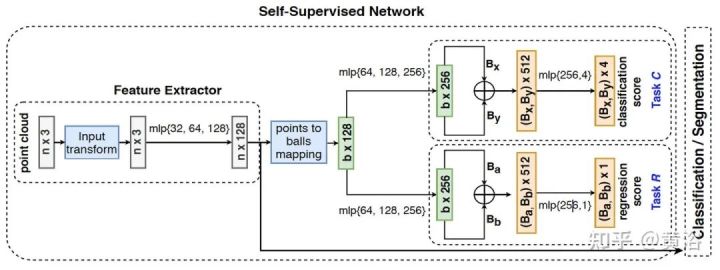
“Self-Supervised Few-Shot Learning on Point Clouds“
-
“Few-shot 3D Point Cloud Semantic Segmentation“



编辑推荐




最新资讯
-
大卓智能端到端直播实测,16公里复杂路段挑
2025-04-25 17:16
-
《汽车轮胎耐撞击性能试验方法-车辆法》等
2025-04-25 11:45
-
“真实”而精确的能量流测试:电动汽车能效
2025-04-25 11:44
-
GRAS助力中国高校科研升级
2025-04-25 10:25
-
梅赛德斯-AMG使用VI-CarRealTime开发其控制
2025-04-25 10:21
