




 广告
广告





















































一文读懂自动驾驶数据闭环
2021-09-21 18:17:01· 来源:智驾最前沿

应该说,自动驾驶的算法模块,基本都是数据驱动的训练模型要优于基于规则或者优化的,尤其是感知和预测。
以下图(综述论文 “A Survey of Autonomous Driving: Common Practices and Emerging Technologies”)为例,现在自动驾驶的开发基本是模块化的(a),只有个别是采用端到端模式(b)。

端到端模式可以说绝对是数据驱动的(如图为例),因为传统的优化和规则方法无法处理如此复杂的系统设计和公式化。
“E2E Learning of Driving Models with Surround-View Cameras and Route Planners”
模块化的方法也是可以采用数据驱动方式,可以分成以下模块:
-
感知:图像/激光雷达/毫米波雷达
-
地图+定位
-
预测(感知-预测)
-
规划决策(预测-规划)
-
控制(规划-控制)
-
传感器预处理
-
模拟仿真
下面以此分别讨论:
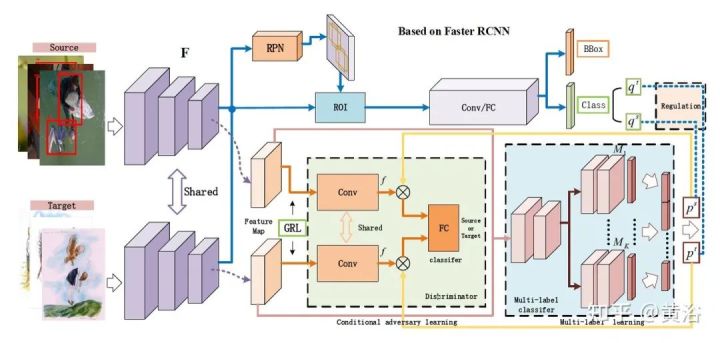
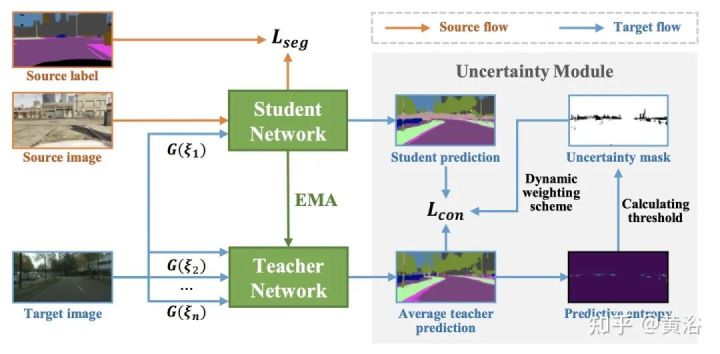
1)感知:2-D/3-D 目标检测和分割基本是采用深度学习模型,无论激光雷达、摄像头或者传感器融合的形式;跟踪基本是tracking-by-detection方式,不过把跟踪和检测集成在一起做深度学习模型也是大家讨论的热点之一。
“Keep your Eyes on the Lane: Real-time Attention-guided Lane Detection”
“M3DSSD: Monocular 3D Single Stage Object Detector”
“PointPillars: Fast Encoders for Object Detection from Point Clouds”
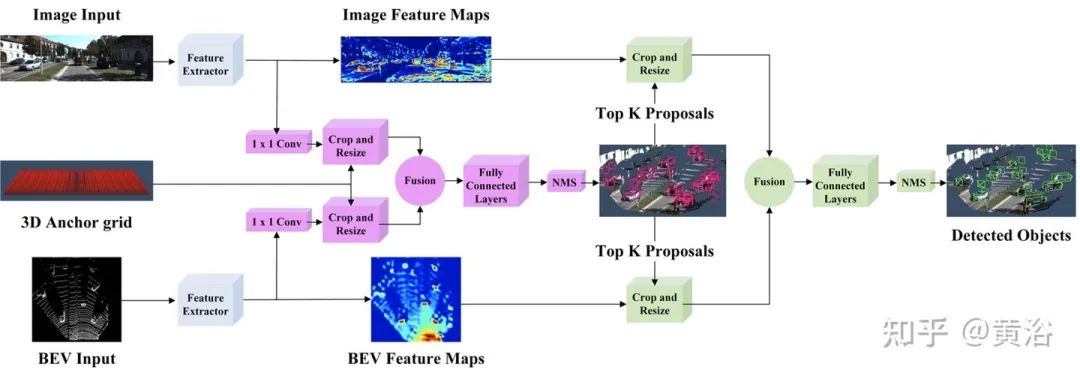
“Joint 3D Proposal Generation and Object Detection from View Aggregation”
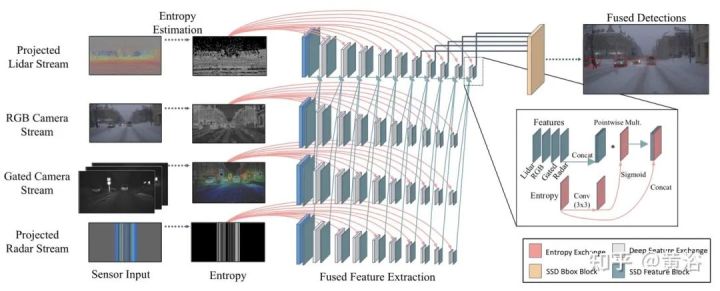
”Seeing Through Fog: Deep Multimodal Sensor Fusion in Unseen Adverse Weather“
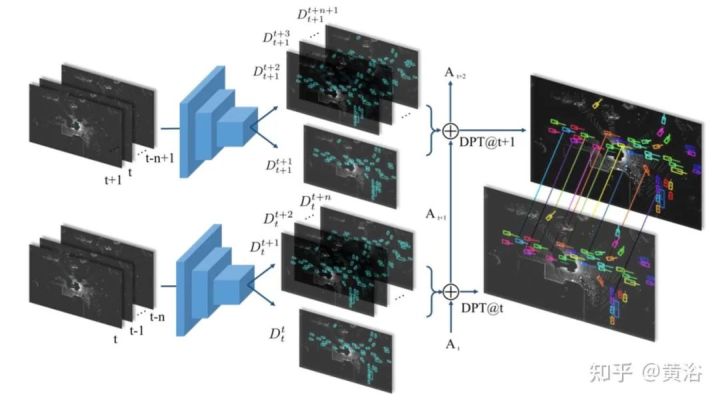
“Fast and Furious: R-T E2E 3D Detection, Tracking& Motion Forecasting with a Single Cnn”



编辑推荐




最新资讯
-
imc/GRAS/AP首次联袂亮相ATE India 盛会
2025-04-11 13:49
-
GB/T 31486-2024 与 GB/T 31484-2015 修改
2025-04-11 13:48
-
标准介绍丨ASAM ARTI 运行实时接口
2025-04-11 10:29
-
自动驾驶中基于深度学习的雷达与视觉融合用
2025-04-11 10:25
-
标准研究丨《汽车开闭件性能要求和试验方法
2025-04-11 10:24
